机器人运动学标定:基于公垂线模型的指数积标定——减少标定参数,避免过度约束
文章目录
- 基于旋量理论的公垂线变换研究——用公垂线思考误差模型的前提
- 基于公垂线模型的六轴串联工业机器人实际正向运动学建模
- 基于公垂线模型的误差建模分析及参数辨识
- 本文使用的指数映射关于旋量微分求解公式
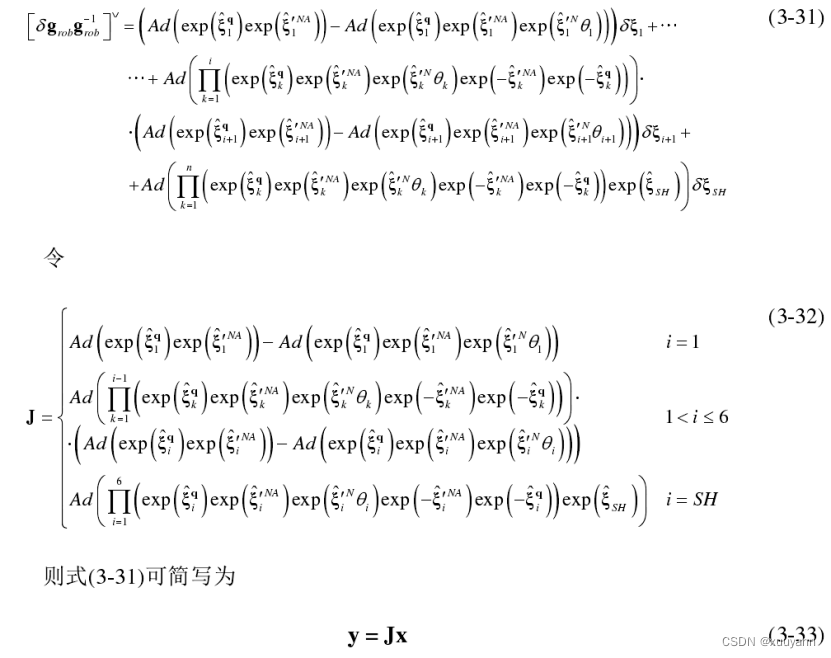
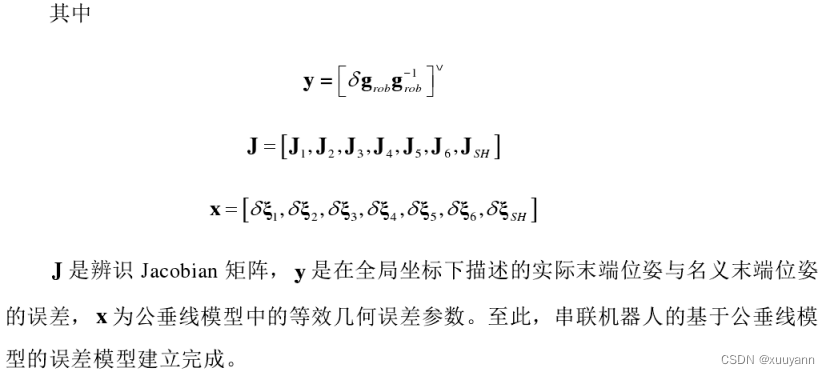
- 对正运动学公式进行全微分线性化并选择误差参数,建立误差参数辨识模型
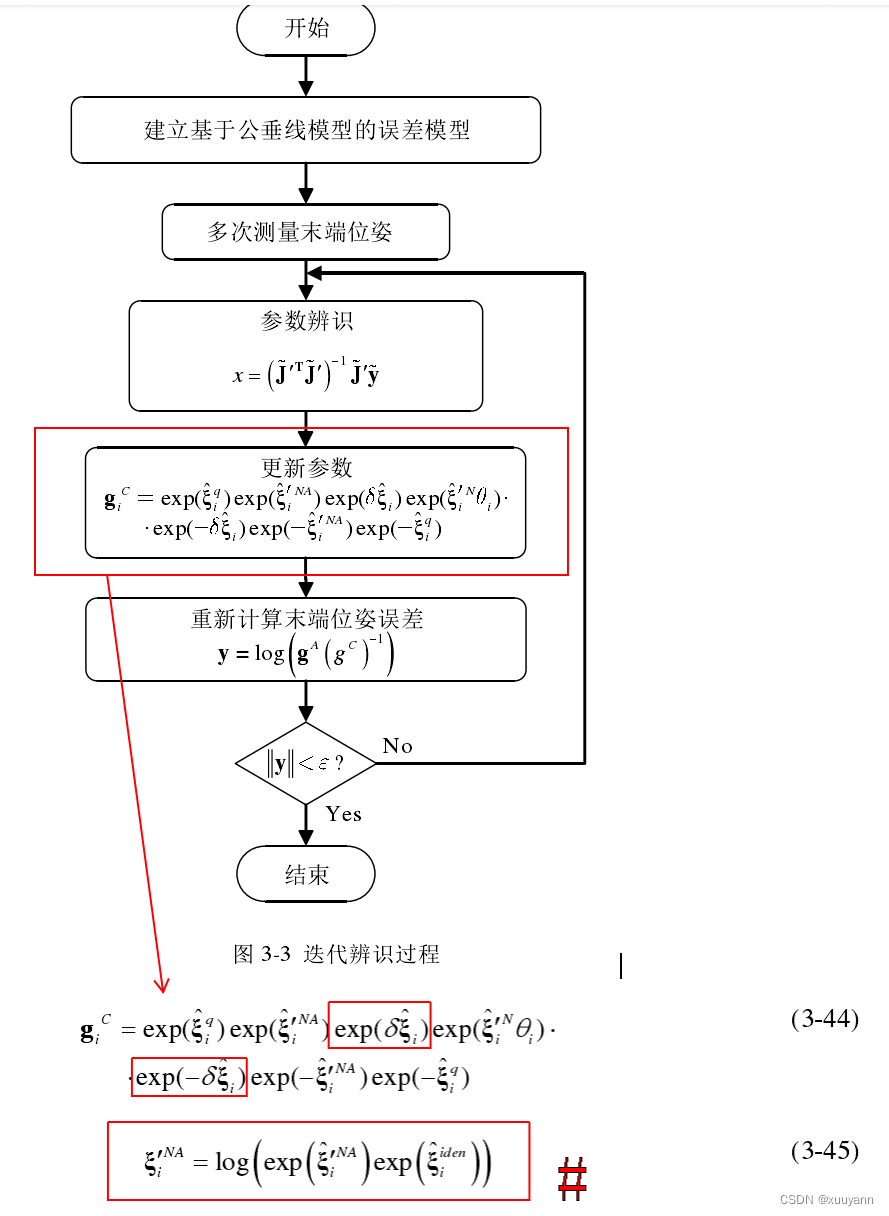
- 基于迭代最小二乘法的误差参数辨识
- 参考文献
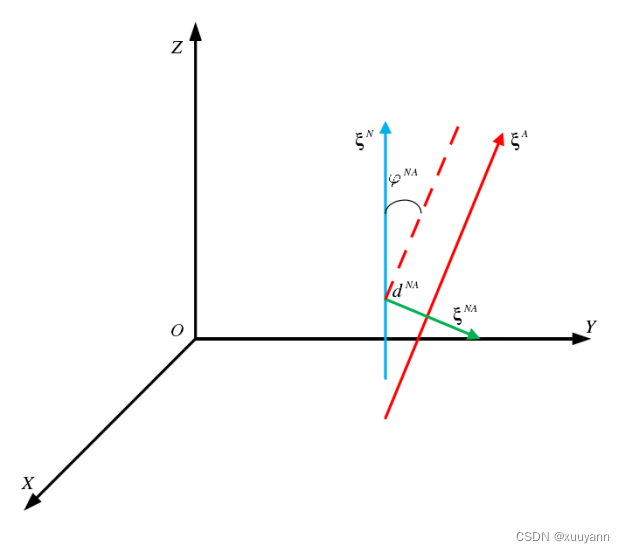
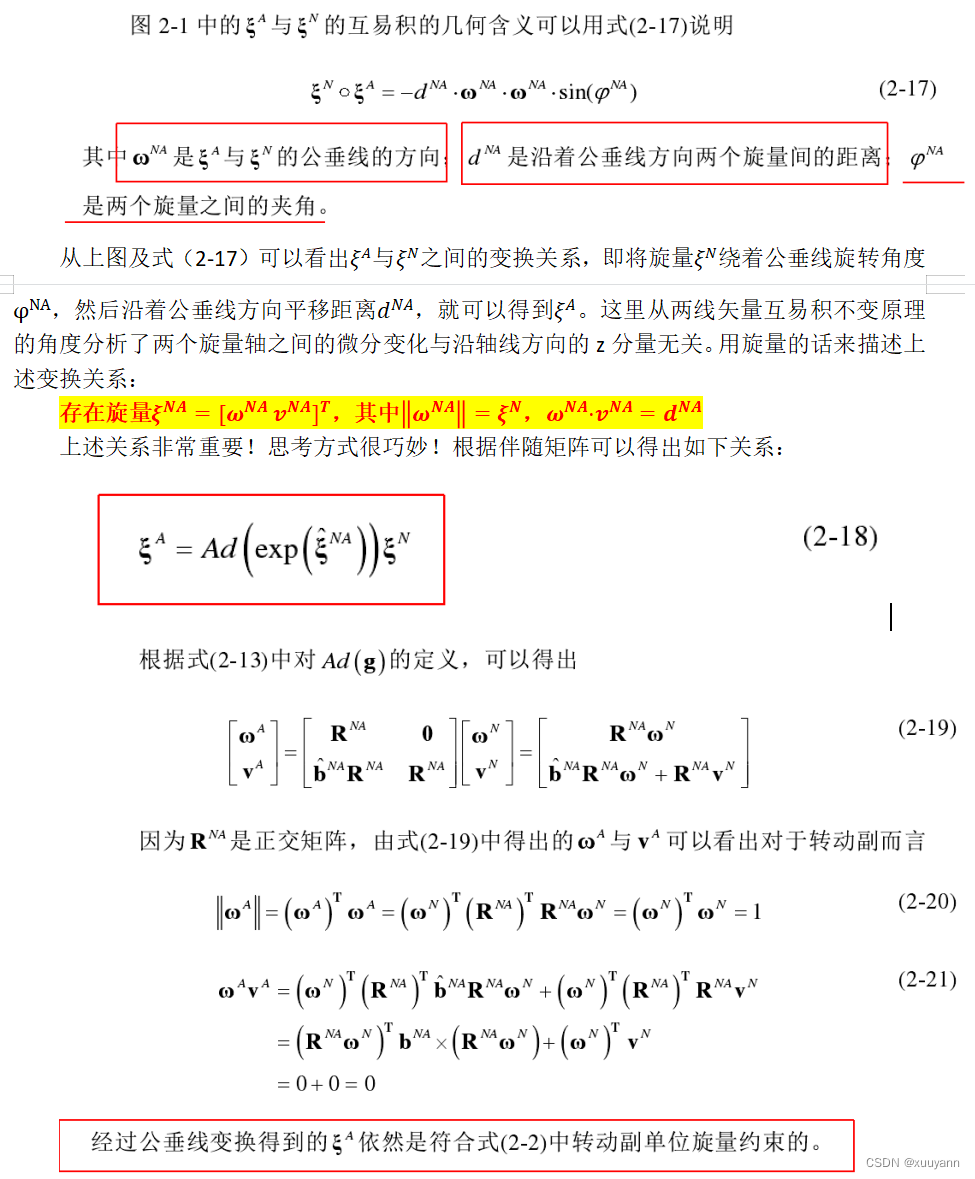
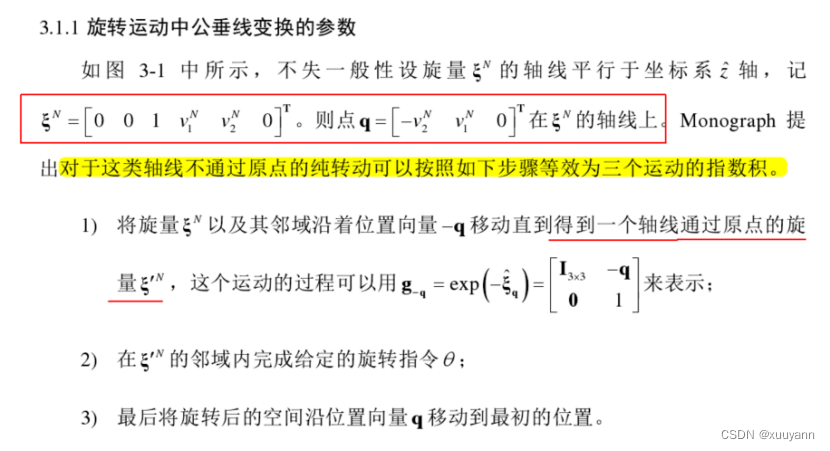
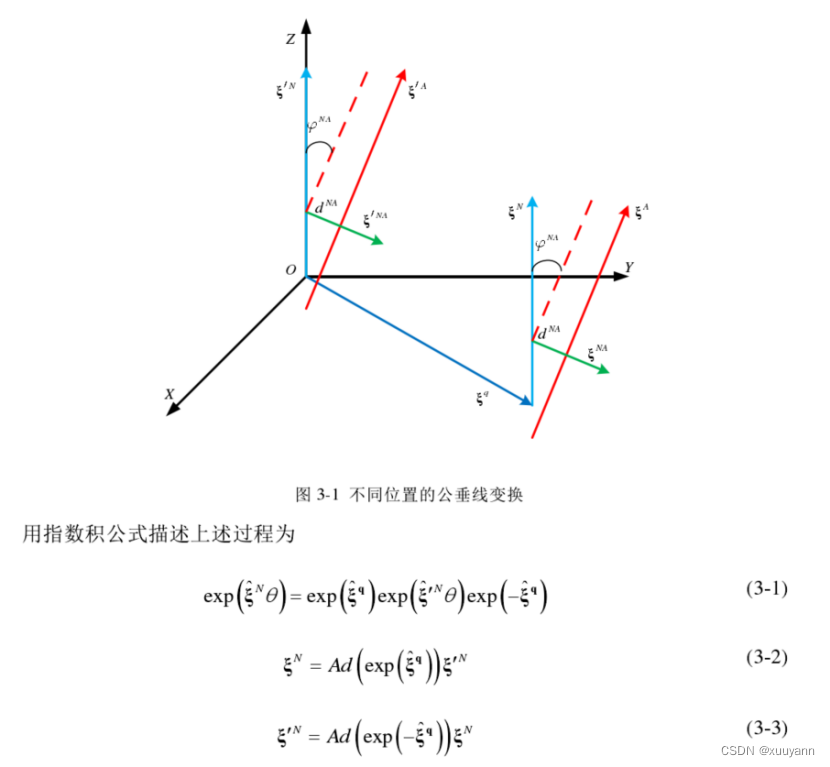
基于旋量理论的公垂线变换研究——用公垂线思考误差模型的前提

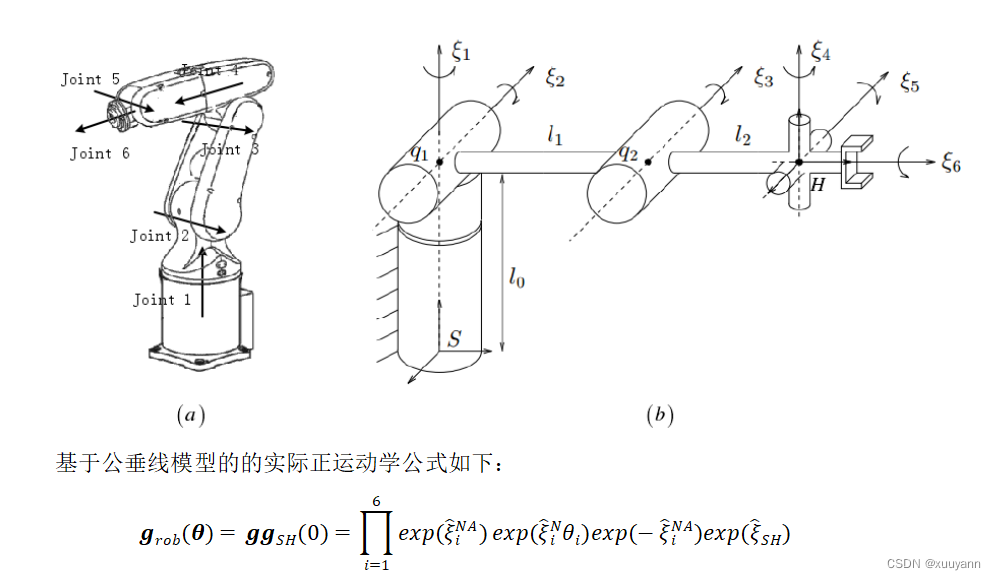
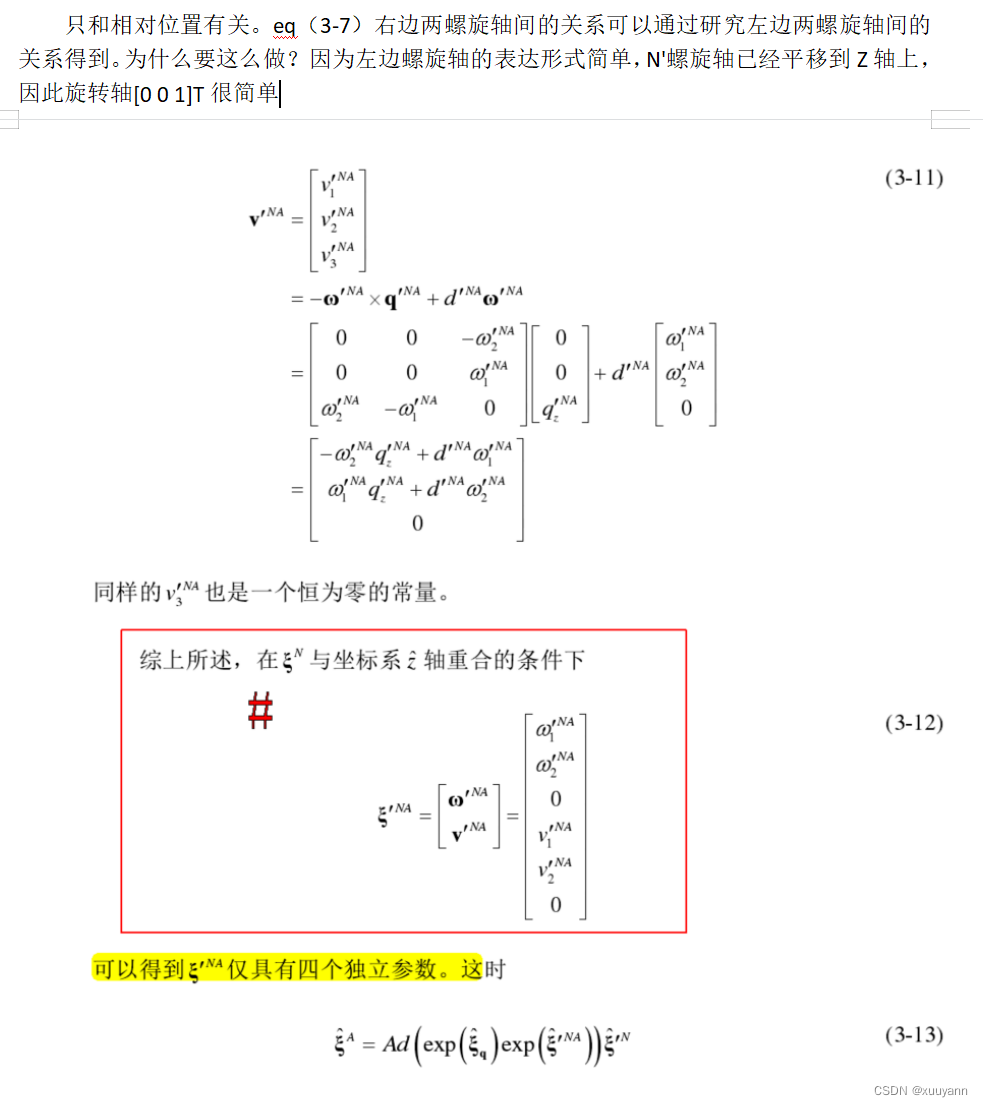
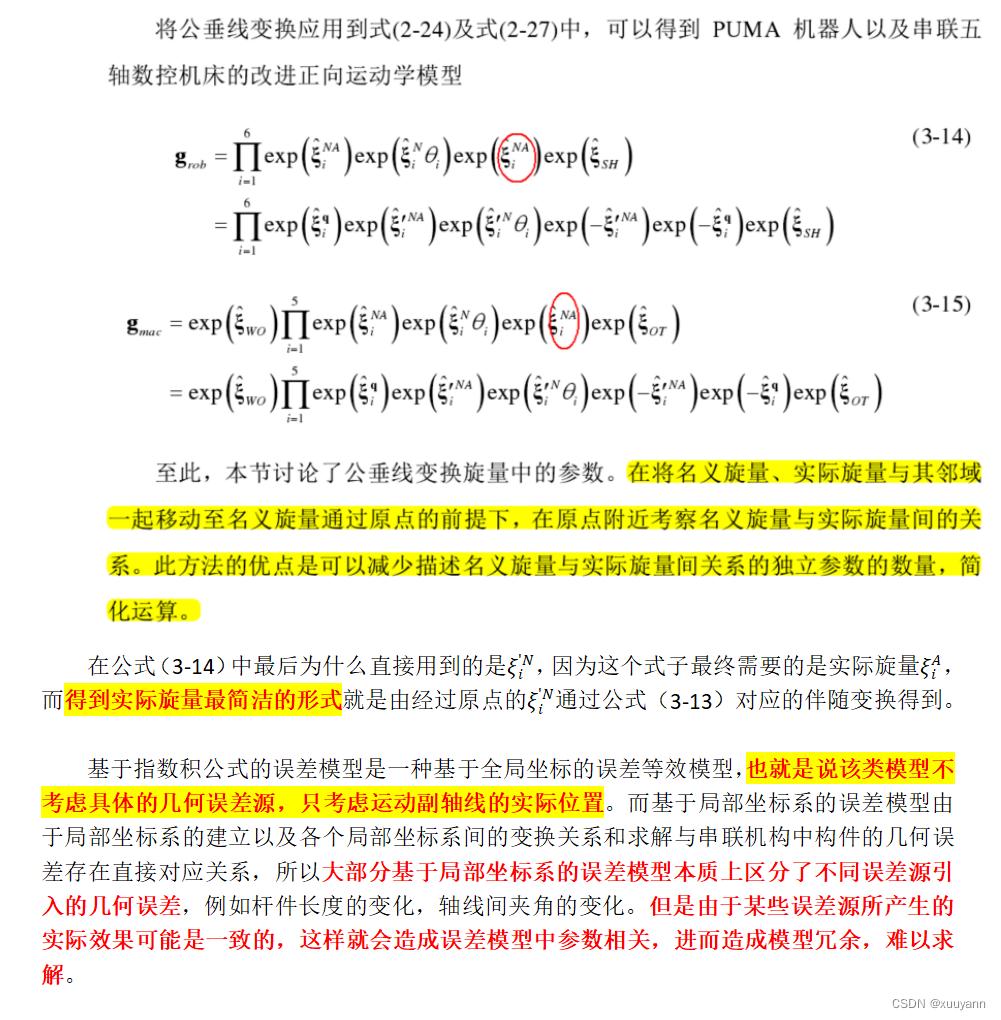
基于公垂线模型的六轴串联工业机器人实际正向运动学建模
基于公垂线模型的误差建模分析及参数辨识
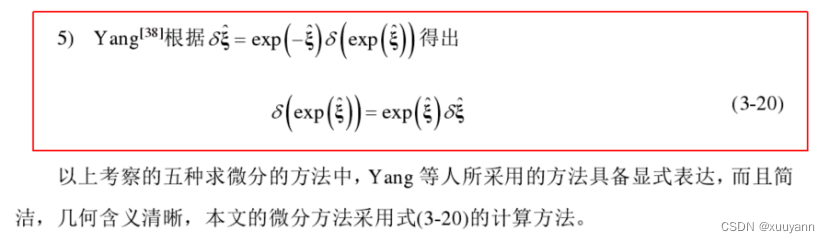
本文使用的指数映射关于旋量微分求解公式
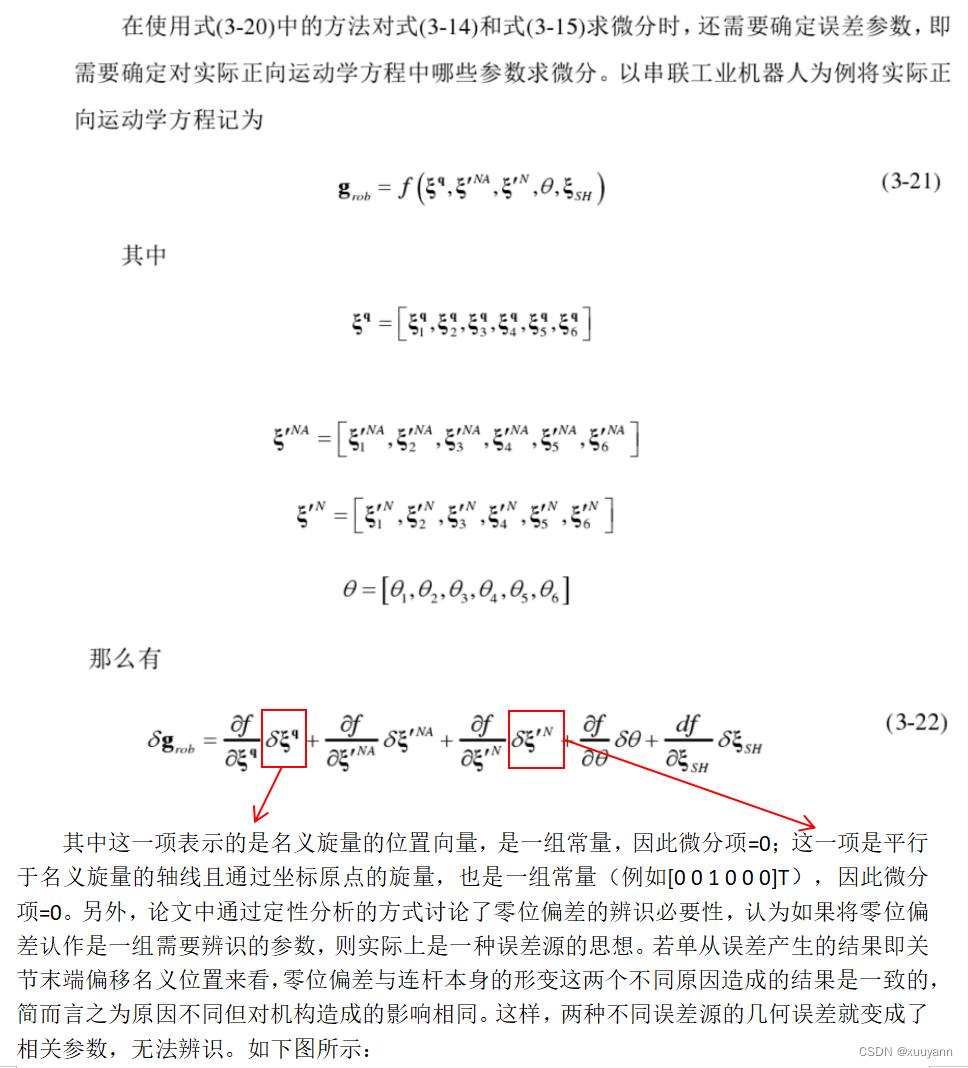
对正运动学公式进行全微分线性化并选择误差参数,建立误差参数辨识模型


基于迭代最小二乘法的误差参数辨识
参考文献
[1] 乔昱. 基于公垂线模型的串联机构运动学标定方法研究[D].华中科技大学,2017.
[2] 何锐波. 基于指数积公式的串联机构运动学标定方法研究[D].华中科技大学,2010.
[3] He R, Zhao Y, Yang S, et al. Kinematic-parameter identification for serial-robot calibration based on POE formula[J]. IEEE Transactions on Robotics, 2010, 26(3): 411-423.
[4] Yang X, Wu L, Li J, et al. A minimal kinematic model for serial robot calibration using POE formula[J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(3): 326-334.
[5] 戴建生. 机构学与机器人学的几何基础与旋量代数[M]. 北京:高等教育出版社, 2014.
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!