ROBOTOUS六维力传感器的串扰误差
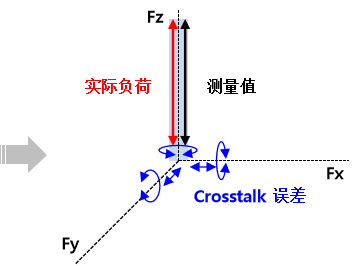
串扰误差定义为六维力传感器在特定成分方向施加负荷(测量方向内)时,在该轴以外的方向上产生的测量误差的最大值。串扰误差可以如下表所示以排列形式表示。
| 负载轴 | Crosstalk 误差 (%FS) | |||||
| Fx | Fy | Fz | Tx | Ty | Tz | |
| Fx | < 0.5 | < 0.5 | < 0.2 | < 0.3 | < 0.3 | |
| Fy | < 0.2 | < 0.5 | < 0.3 | < 0.3 | < 0.5 | |
| Fz | < 0.2 | < 0.2 | < 0.2 | < 0.2 | < 0.2 | |
| Tx | < 0.3 | < 0.3 | < 0.6 | < 0.1 | < 0.1 | |
| Ty | < 0.2 | < 0.2 | < 0.3 | < 0.2 | < 0.2 | |
| Tz | < 0.2 | < 0.5 | < 0.5 | < 0.2 | < 0.3 | |
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!