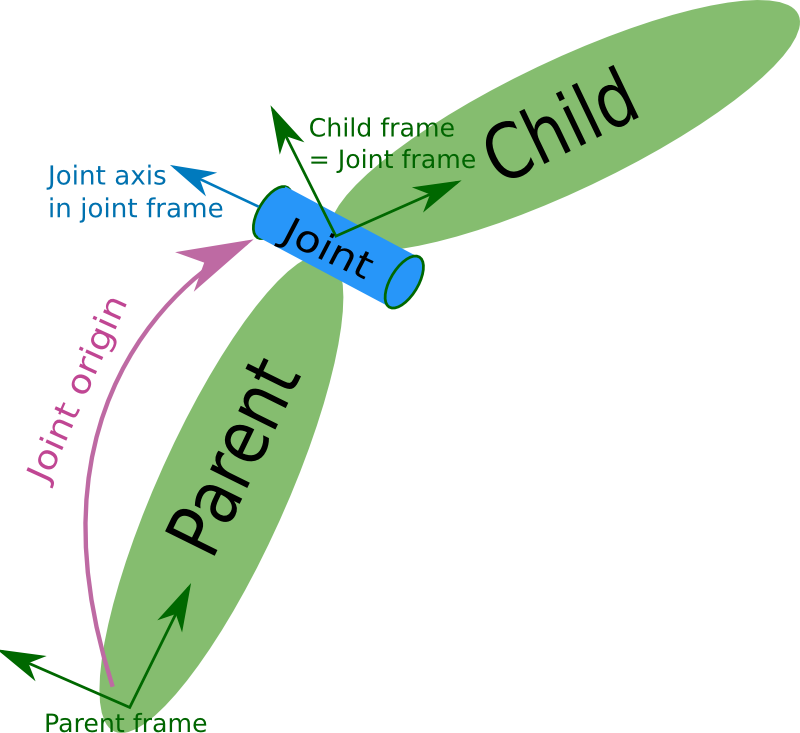
URDF的关节定义:
关节里面首先定了父link跟子link, 以及关节的转动轴.
接着是传感器的定义:
摄像头:
激光传感器:
转载于:https://www.cnblogs.com/Montauk/p/6912037.html
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!
Duilib中list控件支持ctrl和shif多行选中的实现
[ICML2015]Batch Normalization:Accelerating Deep Network Training by Reducing Internal Covariate Shif
win10系统 微软输入法 于eclipse ctrl+shif+f冲突间接处理办法
Codeforces Round #259 (Div. 2) B. Little Pony and Sort by Shif
读LDD3,内存映射与DMA--PAGE_SHIF…
VMware虚拟机安装XP【要先分区,再设置BOOT 启动CD,shif+上移】
更换iBus五笔的左与右Shif
sublime ctrl+shif+f 没用解决办法
idea 对 ctrl + z 的撤销 是 ctrl + shif + z
计算机最早的设计师应用于,计算机应用基础选择题doc.doc
win10自带截图神器:Win+Shift+S
Python基础之文件目录操作
python简述目录_Python基础之文件目录操作(示例代码)
tp5 如何做数据采集
任务2-7(服务器字体+阿里巴巴矢量库)
html标签(1):h1~h6,p,br,pre,hr
TI 电量计介绍与芯片选型指南
几款TI电源芯片简介
TI DSP芯片C2000系列读取FLASH数据
德州仪器(Ti)平台嵌入式开发基础
TI三相电机智能栅极驱动芯片特点分类
省选模拟(12.08) T3 圈圈圈圈圈圈圈圈
Hadoop生态圈技术栈(上)
大数据开发基础入门与项目实战(三)Hadoop核心及生态圈技术栈之6.Impala交互式查询
小猿圈之Linux下Mysql 操作命令
大数据Hadoop生态圈常用面试题
大数据开发基础入门与项目实战(三)Hadoop核心及生态圈技术栈之4.Hive DDL、DQL和数据操作
备战Noip2018模拟赛11(B组)T3 Monogatari 物语
【智能优化算法-圆圈搜索算法】基于圆圈搜索算法Circle Search Algorithm求解单目标优化问题附matlab代码
NYOJ 78 圈水池
递归问题 跑道 汽车 绕圈问题 Python实现
Hadoop生态圈(三):MapReduce
微信公众账号
微信扫一扫加关注