一.PID.平衡小车直立控制理论基础
平衡小车理论控制原理
 如果我们要控制一根木棍在手上直立,需要两个步骤
如果我们要控制一根木棍在手上直立,需要两个步骤
1.托着木棒的手可以移动
2.眼睛能看到木棒的倾斜角度和倾斜趋势(角速度)

类比到平衡小车中,同理想让小车保持平衡,同样需要一个负反馈机制,让小车角度回正,理想情况下,我们只需要控制电机的加速度和小车的倾角成正比就可保持平衡。

问题
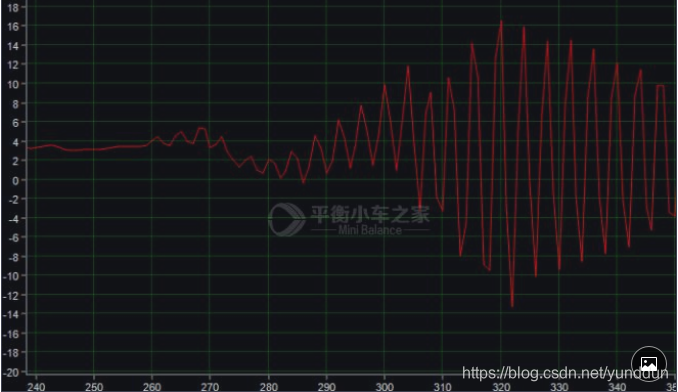
然而随着角度变小,a逐渐变为0,此时电机虽然不动了,但是小车在惯性作用下,依然会向前,由于惯性,小车将无法平衡,而是震荡无法停止
方案一
小车体现出来的惯性其实可以解释为小车绕轴旋转而产生的转动惯量,如果能让转动惯量为0,那么问题将得到解决,但是分析公式可得
 不管是质量还是重心到质心得距离r都无法为0,所以此方案无解
不管是质量还是重心到质心得距离r都无法为0,所以此方案无解
方案二
模仿单摆运动,增加一个阻尼力,在阻尼力的作用下将慢慢平衡。
单摆模型
受到两个力:
1.在重力作用下,单摆受到和运动方向相反,和角度成正比的回复力
2.在空气中,还受到空气阻尼力(与单摆运动速度成正比,方向相反)
类比到平衡车,可知我们不仅需要和角度成正比的回复力,还需要一个和角速度成正比的阻尼力,才能避免震荡
是不是觉得有点似曾相识,其实这个就是PD算法,角度的回复力为比例控制P,角速度即角度的微分D,它的作用便是保证精确性,降低最大超调量,避免震荡。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!