基于CNTK/C#实现Cifar【附源码】
文章目录
- 前言
- 一、数据集的构建
- 二、CNTK/C#->Cifar代码构建
- 1.首先定义标准变量
- 2.定义GPU环境
- 3.载入数据集
- 4.创建模型
- 5.训练指标
- 6.学习率设置
- 7.训练器
- 8.开始训练
- 9.验证集合
- 三、训练展示
- 源码
前言
本文讲解基于CNTK+C#实现Cifar功能,并且如何构建ResNet网络结构
一、数据集的构建
首先这里提供一个1.tar.gz和一个py文件,这里主要是构建数据集,使用者只需要运行python文件就可以得到如下文件夹,此文件夹就是cifar的训练数据集
python实现代码如下:
from PIL import Image
import getopt, os, shutil, struct, sys,tarfile
import numpy as np
import pickle as cp
import xml.etree.cElementTree as et
import xml.dom.minidomimgSize = 32
numFeature = imgSize * imgSize * 3data_dir = './CIFAR-10/'
train_filename = data_dir + '/Train_cntk_text.txt'
test_filename = data_dir + '/Test_cntk_text.txt'
train_img_directory = data_dir + '/Train'
test_img_directory = data_dir + '/Test'def readBatch(src):with open(src, 'rb') as f:if sys.version_info[0] < 3: d = cp.load(f) else:d = cp.load(f, encoding='latin1')data = d['data']feat = datares = np.hstack((feat, np.reshape(d['labels'], (len(d['labels']), 1))))return res.astype(np.int)def saveTxt(filename, ndarray):with open(filename, 'w') as f:labels = list(map(' '.join, np.eye(10, dtype=np.uint).astype(str)))for row in ndarray:row_str = row.astype(str)label_str = labels[row[-1]]feature_str = ' '.join(row_str[:-1])f.write('|labels {} |features {}\n'.format(label_str, feature_str))def saveMean(fname, data):root = et.Element('opencv_storage')et.SubElement(root, 'Channel').text = '3'et.SubElement(root, 'Row').text = str(imgSize)et.SubElement(root, 'Col').text = str(imgSize)meanImg = et.SubElement(root, 'MeanImg', type_id='opencv-matrix')et.SubElement(meanImg, 'rows').text = '1'et.SubElement(meanImg, 'cols').text = str(imgSize * imgSize * 3)et.SubElement(meanImg, 'dt').text = 'f'et.SubElement(meanImg, 'data').text = ' '.join(['%e' % n for n in np.reshape(data, (imgSize * imgSize * 3))])tree = et.ElementTree(root)tree.write(fname)x = xml.dom.minidom.parse(fname)with open(fname, 'w') as f:f.write(x.toprettyxml(indent = ' '))def saveImage(fname, data, label, mapFile, regrFile, pad, **key_parms):# data in CIFAR-10 dataset is in CHW format.pixData = data.reshape((3, imgSize, imgSize))if ('mean' in key_parms):key_parms['mean'] += pixDataif pad > 0:pixData = np.pad(pixData, ((0, 0), (pad, pad), (pad, pad)), mode='constant', constant_values=128) img = Image.new('RGB', (imgSize + 2 * pad, imgSize + 2 * pad))pixels = img.load()for x in range(img.size[0]):for y in range(img.size[1]):pixels[x, y] = (pixData[0][y][x], pixData[1][y][x], pixData[2][y][x])img.save(fname)mapFile.write("%s\t%d\n" % (fname, label))channelMean = np.mean(pixData, axis=(1,2))regrFile.write("|regrLabels\t%f\t%f\t%f\n" % (channelMean[0]/255.0, channelMean[1]/255.0, channelMean[2]/255.0))def saveTrainImages(filename, foldername):if not os.path.exists(foldername):os.makedirs(foldername)data = {}dataMean = np.zeros((3, imgSize, imgSize)) with open(os.path.join(data_dir,'train_map.txt'), 'w') as mapFile:with open(os.path.join(data_dir,'train_regrLabels.txt'), 'w') as regrFile:for ifile in range(1, 6):with open(os.path.join('./cifar-10-batches-py', 'data_batch_' + str(ifile)), 'rb') as f:if sys.version_info[0] < 3: data = cp.load(f)else: data = cp.load(f, encoding='latin1')for i in range(10000):fname = os.path.join(os.path.abspath(foldername), ('%05d.png' % (i + (ifile - 1) * 10000)))saveImage(fname, data['data'][i, :], data['labels'][i], mapFile, regrFile, 4, mean=dataMean)dataMean = dataMean / (50 * 1000)saveMean(os.path.join(data_dir,'CIFAR-10_mean.xml'), dataMean)def saveTestImages(filename, foldername):if not os.path.exists(foldername):os.makedirs(foldername)with open(os.path.join(data_dir,'test_map.txt'), 'w') as mapFile:with open(os.path.join(data_dir,'test_regrLabels.txt'), 'w') as regrFile:with open(os.path.join('./cifar-10-batches-py', 'test_batch'), 'rb') as f:if sys.version_info[0] < 3: data = cp.load(f)else: data = cp.load(f, encoding='latin1')for i in range(10000):fname = os.path.join(os.path.abspath(foldername), ('%05d.png' % i))saveImage(fname, data['data'][i, :], data['labels'][i], mapFile, regrFile, 0)# 解压压缩包
with tarfile.open(r'1.tar.gz') as tar:tar.extractall()
trn = np.empty((0, numFeature + 1), dtype=np.int)
for i in range(5):batchName = './cifar-10-batches-py/data_batch_{0}'.format(i + 1)trn = np.vstack((trn, readBatch(batchName)))
tst = readBatch('./cifar-10-batches-py/test_batch')if not os.path.exists(data_dir):os.makedirs(data_dir)
os.makedirs(train_img_directory)
os.makedirs(test_img_directory)saveTxt(os.path.join(data_dir,'Train_cntk_text.txt'), trn)
saveTxt(os.path.join(data_dir,'Test_cntk_text.txt'), tst)saveTrainImages(os.path.join(data_dir,'Train_cntk_text.txt'), train_img_directory )
saveTestImages(os.path.join(data_dir,'Test_cntk_text.txt'), test_img_directory )如图:
最后得到的目录结构如下:

二、CNTK/C#->Cifar代码构建
1.首先定义标准变量
//定义模型文件及训练次数
string modelFile = "./Cifar10Rest.model";
uint MaxEpochs = 120;
2.定义GPU环境
//定义GPU的配置
var device = DeviceDescriptor.GPUDevice(0);
3.载入数据集
//载入训练数据
var minibatchSource = CreateMinibatchSource(@".\CIFAR-10\train_map.txt", @".\CIFAR-10\CIFAR-10_mean.xml", imageDim, numClasses, MaxEpochs);
var imageStreamInfo = minibatchSource.StreamInfo("features");
var labelStreamInfo = minibatchSource.StreamInfo("labels");
4.创建模型
//创建模型,先定义输入输出,然后定义模型,这里使用ResNet模型
var imageInput = CNTKLib.InputVariable(imageDim, imageStreamInfo.m_elementType, "Images");
var labelsVar = CNTKLib.InputVariable(new int[] { numClasses }, labelStreamInfo.m_elementType, "Labels");
var classifierOutput = ResNetClassifier(imageInput, numClasses, device, "classifierOutput");
模型结构具体实现代码
private static Function ConvBatchNormalizationLayer(Variable input, int outFeatureMapCount, int kernelWidth, int kernelHeight, int hStride, int vStride, double wScale, double bValue, double scValue, int bnTimeConst, bool spatial, DeviceDescriptor device)
{int numInputChannels = input.Shape[input.Shape.Rank - 1];var convParams = new Parameter(new int[] { kernelWidth, kernelHeight, numInputChannels, outFeatureMapCount },DataType.Float, CNTKLib.GlorotUniformInitializer(wScale, -1, 2), device);var convFunction = CNTKLib.Convolution(convParams, input, new int[] { hStride, vStride, numInputChannels });var biasParams = new Parameter(new int[] { NDShape.InferredDimension }, (float)bValue, device, "");var scaleParams = new Parameter(new int[] { NDShape.InferredDimension }, (float)scValue, device, "");var runningMean = new Constant(new int[] { NDShape.InferredDimension }, 0.0f, device);var runningInvStd = new Constant(new int[] { NDShape.InferredDimension }, 0.0f, device);var runningCount = Constant.Scalar(0.0f, device);return CNTKLib.BatchNormalization(convFunction, scaleParams, biasParams, runningMean, runningInvStd, runningCount,spatial, (double)bnTimeConst, 0.0, 1e-5 /* epsilon */);
}
private static Function ConvBatchNormalizationReLULayer(Variable input, int outFeatureMapCount, int kernelWidth, int kernelHeight, int hStride, int vStride, double wScale, double bValue, double scValue, int bnTimeConst, bool spatial, DeviceDescriptor device)
{var convBNFunction = ConvBatchNormalizationLayer(input, outFeatureMapCount, kernelWidth, kernelHeight, hStride, vStride, wScale, bValue, scValue, bnTimeConst, spatial, device);return CNTKLib.ReLU(convBNFunction);
}
private static Function ResNetNode(Variable input, int outFeatureMapCount, int kernelWidth, int kernelHeight, double wScale, double bValue,double scValue, int bnTimeConst, bool spatial, DeviceDescriptor device)
{var c1 = ConvBatchNormalizationReLULayer(input, outFeatureMapCount, kernelWidth, kernelHeight, 1, 1, wScale, bValue, scValue, bnTimeConst, spatial, device);var c2 = ConvBatchNormalizationLayer(c1, outFeatureMapCount, kernelWidth, kernelHeight, 1, 1, wScale, bValue, scValue, bnTimeConst, spatial, device);var p = CNTKLib.Plus(c2, input);return CNTKLib.ReLU(p);
}
private static Function ProjectLayer(Variable wProj, Variable input, int hStride, int vStride, double bValue, double scValue, int bnTimeConst, DeviceDescriptor device)
{int outFeatureMapCount = wProj.Shape[0];var b = new Parameter(new int[] { outFeatureMapCount }, (float)bValue, device, "");var sc = new Parameter(new int[] { outFeatureMapCount }, (float)scValue, device, "");var m = new Constant(new int[] { outFeatureMapCount }, 0.0f, device);var v = new Constant(new int[] { outFeatureMapCount }, 0.0f, device);var n = Constant.Scalar(0.0f, device);int numInputChannels = input.Shape[input.Shape.Rank - 1];var c = CNTKLib.Convolution(wProj, input, new int[] { hStride, vStride, numInputChannels }, new bool[] { true }, new bool[] { false });return CNTKLib.BatchNormalization(c, sc, b, m, v, n, true /*spatial*/, (double)bnTimeConst, 0, 1e-5, false);
}
private static Function ResNetNodeInc(Variable input, int outFeatureMapCount, int kernelWidth, int kernelHeight, double wScale, double bValue, double scValue, int bnTimeConst, bool spatial, Variable wProj, DeviceDescriptor device)
{var c1 = ConvBatchNormalizationReLULayer(input, outFeatureMapCount, kernelWidth, kernelHeight, 2, 2, wScale, bValue, scValue, bnTimeConst, spatial, device);var c2 = ConvBatchNormalizationLayer(c1, outFeatureMapCount, kernelWidth, kernelHeight, 1, 1, wScale, bValue, scValue, bnTimeConst, spatial, device);var cProj = ProjectLayer(wProj, input, 2, 2, bValue, scValue, bnTimeConst, device);var p = CNTKLib.Plus(c2, cProj);return CNTKLib.ReLU(p);
}
private static Constant GetProjectionMap(int outputDim, int inputDim, DeviceDescriptor device)
{if (inputDim > outputDim)throw new Exception("Can only project from lower to higher dimensionality");float[] projectionMapValues = new float[inputDim * outputDim];for (int i = 0; i < inputDim * outputDim; i++)projectionMapValues[i] = 0;for (int i = 0; i < inputDim; ++i)projectionMapValues[(i * (int)inputDim) + i] = 1.0f;var projectionMap = new NDArrayView(DataType.Float, new int[] { 1, 1, inputDim, outputDim }, device);projectionMap.CopyFrom(new NDArrayView(new int[] { 1, 1, inputDim, outputDim }, projectionMapValues, (uint)projectionMapValues.Count(), device));return new Constant(projectionMap);
}
private static Function ResNetClassifier(Variable input, int numOutputClasses, DeviceDescriptor device, string outputName)
{//模型构建double convWScale = 7.07;double convBValue = 0;double fc1WScale = 0.4;double fc1BValue = 0;double scValue = 1;int bnTimeConst = 4096;int kernelWidth = 3;int kernelHeight = 3;double conv1WScale = 0.26;int cMap1 = 16;//卷积+标准化+激活函数var conv1 = ConvBatchNormalizationReLULayer(input, cMap1, kernelWidth, kernelHeight, 1, 1, conv1WScale, convBValue, scValue, bnTimeConst, true /*spatial*/, device);//ResNet实现的块var rn1_1 = ResNetNode(conv1, cMap1, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, false /*spatial*/, device);var rn1_2 = ResNetNode(rn1_1, cMap1, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, true /*spatial*/, device);var rn1_3 = ResNetNode(rn1_2, cMap1, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, false /*spatial*/, device);int cMap2 = 32;var rn2_1_wProj = GetProjectionMap(cMap2, cMap1, device);var rn2_1 = ResNetNodeInc(rn1_3, cMap2, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, true /*spatial*/, rn2_1_wProj, device);var rn2_2 = ResNetNode(rn2_1, cMap2, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, false /*spatial*/, device);var rn2_3 = ResNetNode(rn2_2, cMap2, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, true /*spatial*/, device);int cMap3 = 64;var rn3_1_wProj = GetProjectionMap(cMap3, cMap2, device);var rn3_1 = ResNetNodeInc(rn2_3, cMap3, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, true /*spatial*/, rn3_1_wProj, device);var rn3_2 = ResNetNode(rn3_1, cMap3, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, false /*spatial*/, device);var rn3_3 = ResNetNode(rn3_2, cMap3, kernelWidth, kernelHeight, convWScale, convBValue, scValue, bnTimeConst, false /*spatial*/, device);// 全局平均池化int poolW = 8;int poolH = 8;int poolhStride = 1;int poolvStride = 1;var pool = CNTKLib.Pooling(rn3_3, PoolingType.Average,new int[] { poolW, poolH, 1 }, new int[] { poolhStride, poolvStride, 1 });// 输出层var outTimesParams = new Parameter(new int[] { numOutputClasses, 1, 1, cMap3 }, DataType.Float,CNTKLib.GlorotUniformInitializer(fc1WScale, 1, 0), device);var outBiasParams = new Parameter(new int[] { numOutputClasses }, (float)fc1BValue, device, "");return CNTKLib.Plus(CNTKLib.Times(outTimesParams, pool), outBiasParams, outputName);
}
5.训练指标
//训练及验证指标,loss及acc
var trainingLoss = CNTKLib.CrossEntropyWithSoftmax(classifierOutput, labelsVar, "lossFunction");
var prediction = CNTKLib.ClassificationError(classifierOutput, labelsVar, 5, "predictionError"); //top5
6.学习率设置
var learningRatePerSample = new TrainingParameterScheduleDouble(0.0078125, 1);
7.训练器
var trainer = Trainer.CreateTrainer(classifierOutput, trainingLoss, prediction,new List<Learner> { Learner.SGDLearner(classifierOutput.Parameters(), learningRatePerSample) });
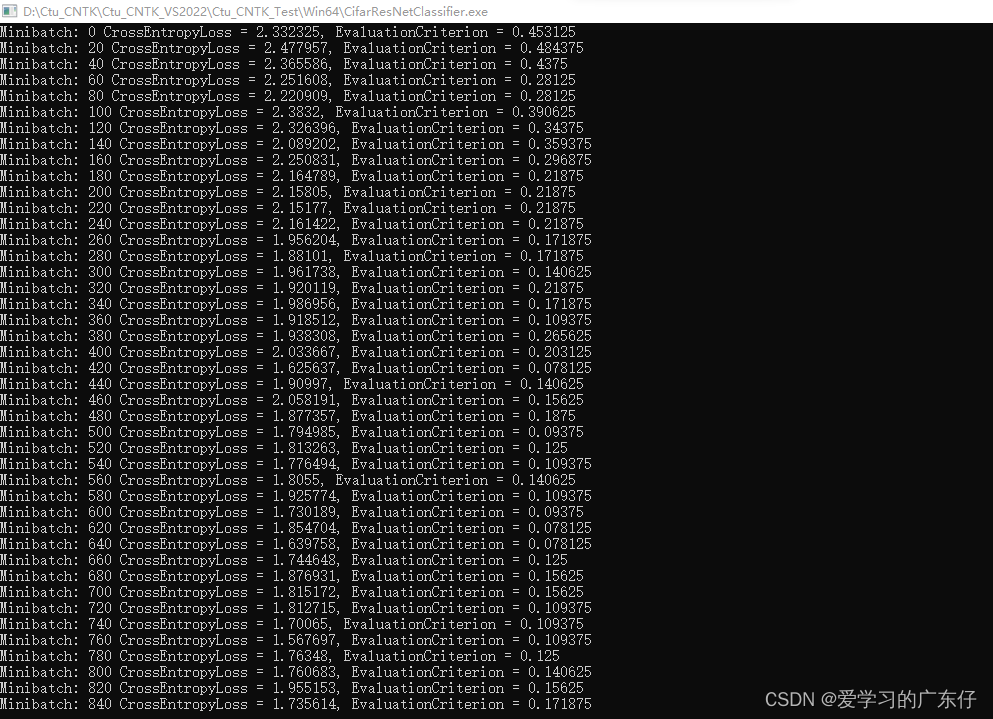
8.开始训练
while (true)
{//获取每次批次的数据var minibatchData = minibatchSource.GetNextMinibatch(minibatchSize, device);if (minibatchData.empty()){break;}//训练批次trainer.TrainMinibatch(new Dictionary<Variable, MinibatchData>(){ { imageInput, minibatchData[imageStreamInfo] }, { labelsVar, minibatchData[labelStreamInfo] } }, device);//输出训练结果PrintTrainingProgress(trainer, miniBatchCount++, outputFrequencyInMinibatches);
}
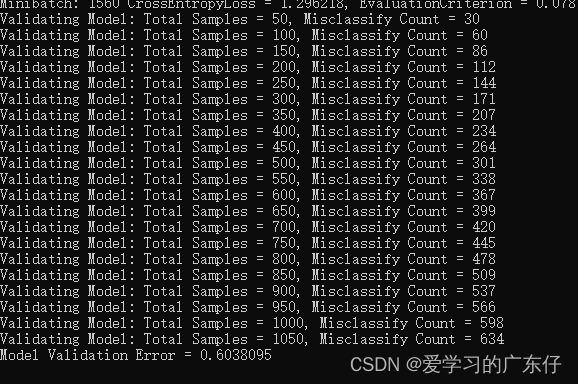
9.验证集合
public static float ValidateModelWithMinibatchSource(string modelFile, MinibatchSource testMinibatchSource, int[] imageDim, int numClasses, string featureInputName, string labelInputName, string outputName, DeviceDescriptor device, int maxCount = 1000)
{Function model = Function.Load(modelFile, device);var imageInput = model.Arguments[0];var labelOutput = model.Outputs.Single(o => o.Name == outputName);var featureStreamInfo = testMinibatchSource.StreamInfo(featureInputName);var labelStreamInfo = testMinibatchSource.StreamInfo(labelInputName);int batchSize = 50;int miscountTotal = 0, totalCount = 0;while (true){var minibatchData = testMinibatchSource.GetNextMinibatch((uint)batchSize, device);if (minibatchData == null || minibatchData.Count == 0)break;totalCount += (int)minibatchData[featureStreamInfo].numberOfSamples;var labelData = minibatchData[labelStreamInfo].data.GetDenseData<float>(labelOutput);var expectedLabels = labelData.Select(l => l.IndexOf(l.Max())).ToList();var inputDataMap = new Dictionary<Variable, Value>() {{ imageInput, minibatchData[featureStreamInfo].data }};var outputDataMap = new Dictionary<Variable, Value>() {{ labelOutput, null }};model.Evaluate(inputDataMap, outputDataMap, device);var outputData = outputDataMap[labelOutput].GetDenseData<float>(labelOutput);var actualLabels = outputData.Select(l => l.IndexOf(l.Max())).ToList();int misMatches = actualLabels.Zip(expectedLabels, (a, b) => a.Equals(b) ? 0 : 1).Sum();miscountTotal += misMatches;Console.WriteLine($"Validating Model: Total Samples = {totalCount}, Misclassify Count = {miscountTotal}");if (totalCount > maxCount)break;}float errorRate = 1.0F * miscountTotal / totalCount;Console.WriteLine($"Model Validation Error = {errorRate}");return errorRate;
}
三、训练展示
源码
源码下载
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!