机器人操作系统入门
一、ROS简介
1.什么是ROS
- ROS是Robot(机器人)+ Operating(操作)+ System(系统)的简称,即为机器人操作系统。ROS主要组件包括ROS Master、ROS Node和ROS Service三种。
- ROS是一个适用于机器人编程的框架,这个框架把原本松散的零部件耦合在了一起,为他们提供了通信架构。
2.ROS产生、发展和壮大的原因和意义
随着技术的发展及人们需求的提高,机器人集成了越来越多的功能、传感器,对用户来说这越来越方便,但对开发者来说恰恰相反,功能的增加带来开发与集成难度迅速上升,机器人操作系统的出现有效缓解了这种问题。从计算机和智能手机的发展过程来看,合适与成熟的操作系统是智能机器人行业大规模发展和在人们的生活中普及的必要条件。
二、安装ROS软件及实例
1.安装ROS
设置软件源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'

添加秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

更新源列表并安装
sudo apt update
sudo apt-get install ros-melodic-desktop-full

设置环境变量
source /opt/ros/melodic/setup.bash
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc

2.运行小乌龟实例
在新的终端输入
roscore
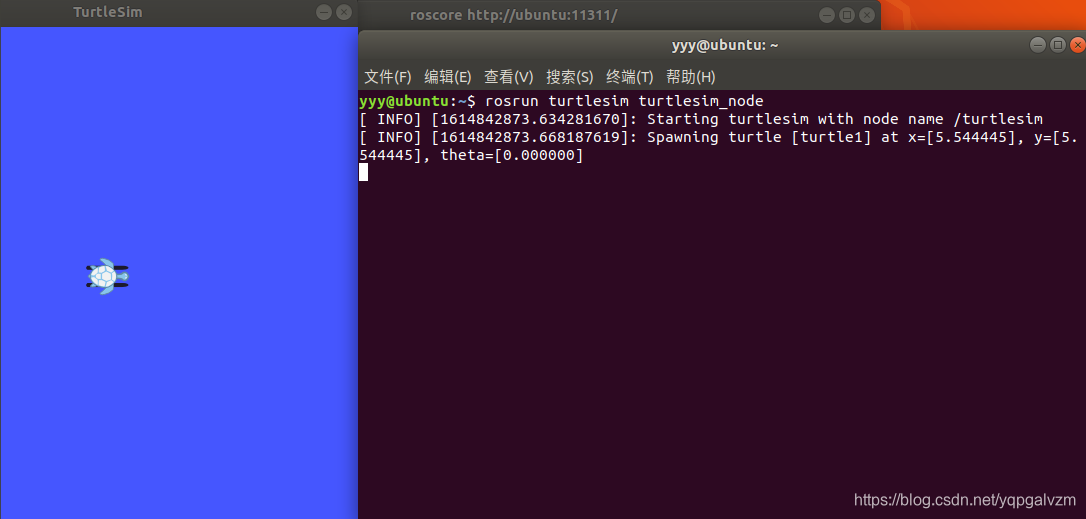
重新打开一个终端输入(上面的终端不要关)
rosrun turtlesim turtlesim_node
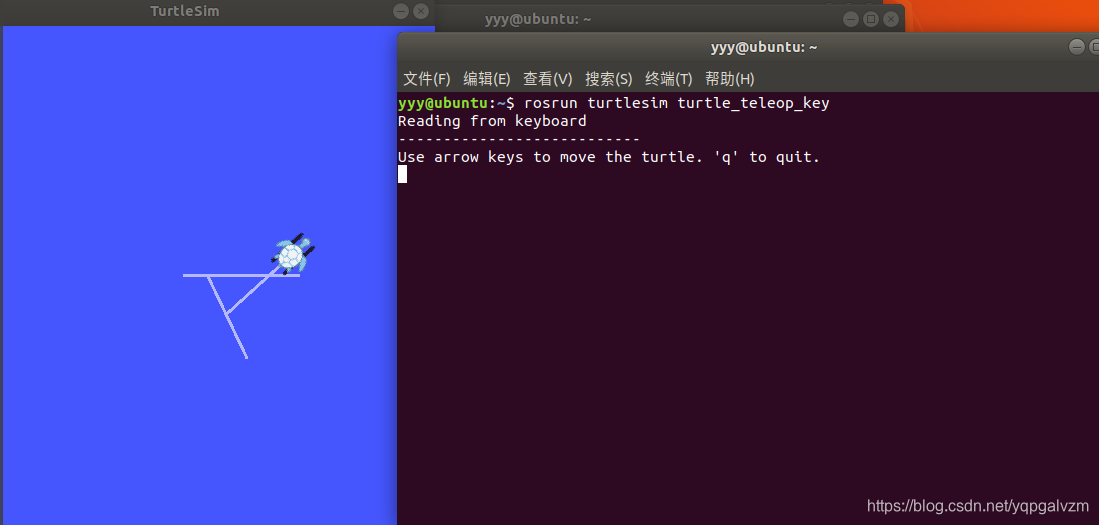
再重新打开一个终端
rosrun turtlesim turtle_teleop_key
然后使用键盘上的方向键控制海龟走位
结果如下
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!