FANUC机器人_通过ROBOGUIDE从零开始做一个离线仿真项目(4)
FANUC机器人_通过ROBOGUIDE从零开始做一个离线仿真项目(4)


上次和大家分享了如何添加一个用于放置物料的托盘,以及如何在手腕末端添加吸盘工具用于抓取工件,具体内容可参考以下链接:
FANUC机器人_通过ROBOGUIDE从零开始做一个离线仿真项目(3)
本次继续和大家分享如何示教和记录用于搬运工件的各个点位。
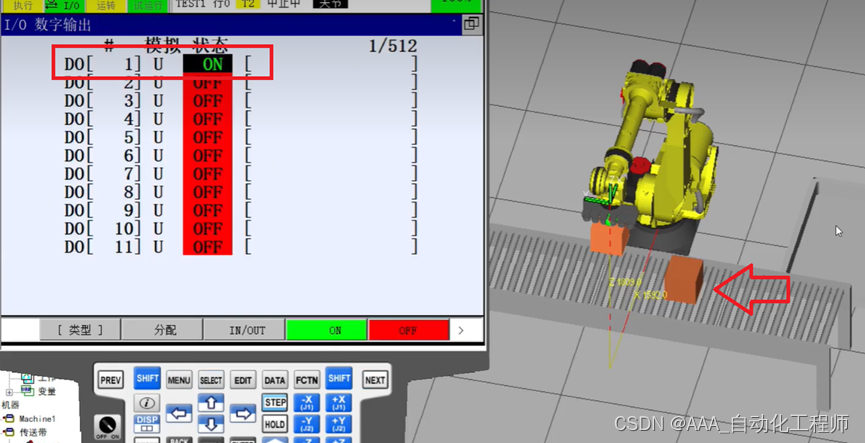
如下图所示,首先,在数字IO界面,强制DO1输出为ON,让工件移动到2500mm处,方便后面点位的示教,
如下图所示,双击传送带中的Link1—工件,点击Move TO,可以看到机器人会移动到工件所在位置,

如下图所示,
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!