NVIDIA NCCL 源码学习(十)- 多机间ncclSend和ncclRecv的过程
回忆一下单机的执行流程,用户执行ncclSend之后通过ncclEnqueueCheck将sendbuff,sendbytes,peer等信息保存到了comm->p2plist中;然后执行ncclGroupEnd,如果发现channel没有建立到peer的链接则先建链,然后根据p2plist执行scheduleSendRecv(ncclSaveKernel)将信息保存到channel->collectives,然后再启动kernel,kernel会遍历channel->collectives执行send和recv。然后我们看下多机的流程是怎样的。
ncclProxyArgs
首先看下scheduleSendRecv过程的ncclSaveKernel,这里流程和单机不一样的为ncclProxySaveP2p。
ncclResult_t ncclSaveKernel(struct ncclInfo* info) {...for (int bid=0; bidcoll == ncclCollSendRecv) ? info->channelId :info->comm->myParams->gridDim.x % info->comm->nChannels;struct ncclChannel* channel = info->comm->channels+channelId;...// ProxyproxyArgs.channel = channel;...if (info->coll == ncclCollSendRecv) {info->comm->myParams->gridDim.x = std::max(info->comm->myParams->gridDim.x, channelId+1);NCCLCHECK(ncclProxySaveP2p(info, channel));} else {NCCLCHECK(ncclProxySaveColl(&proxyArgs, info->pattern, info->root, info->comm->nRanks));}...}...
} 多机间网络通信的过程是由独立的proxy线程执行的,ncclProxyArgs保存了通信需要的参数,proxy线程会根据这些args执行相应的通信流程。然后执行SaveProxy
ncclResult_t ncclProxySaveP2p(struct ncclInfo* info, struct ncclChannel* channel) {struct ncclProxyArgs args;memset(&args, 0, sizeof(struct ncclProxyArgs));args.channel = channel;args.sliceSteps = 1;args.chunkSteps = 1;args.protocol = NCCL_PROTO_SIMPLE;args.opCount = info->comm->opCount;args.dtype = info->datatype;if (info->delta > 0 && info->sendbytes >= 0) {int peersend = (info->comm->rank+info->delta)%info->comm->nRanks;args.nsteps = DIVUP(info->sendbytes, info->comm->buffSizes[NCCL_PROTO_SIMPLE]/NCCL_STEPS/SENDRECV_SLICEFACTOR);if (args.nsteps == 0) args.nsteps = 1;NCCLCHECK(SaveProxy(peersend, &args));}if (info->delta > 0 && info->recvbytes >= 0) {int peerrecv = (info->comm->nRanks+info->comm->rank-info->delta)%info->comm->nRanks;args.nsteps = DIVUP(info->recvbytes, info->comm->buffSizes[NCCL_PROTO_SIMPLE]/NCCL_STEPS/SENDRECV_SLICEFACTOR);if (args.nsteps == 0) args.nsteps = 1;NCCLCHECK(SaveProxy(peerrecv, &args));}return ncclSuccess;
} 首先获取当前channel连接到peer的ncclPeer,根据type是send还是recv获取这个peer的对应connector,单机场景下connector的 transportComm为p2pTransport,proxy为空,因此这里直接返回,而多机场景下为netTransport,proxy不为空,然后申请ncclProxyArgs,设置progress为transportComm->proxy。
template
static ncclResult_t SaveProxy(int peer, struct ncclProxyArgs* args) {if (peer < 0) return ncclSuccess;struct ncclPeer* peerComm = args->channel->peers+peer;struct ncclConnector* connector = type == proxyRecv ? &peerComm->recv : &peerComm->send;if (connector->transportComm == NULL) {WARN("[%d] Error no transport for %s peer %d on channel %d\n", connector->comm->rank,type == proxyRecv ? "recv" : "send", peer, args->channel->id);return ncclInternalError;}if (connector->transportComm->proxy == NULL) return ncclSuccess;struct ncclProxyArgs* op;NCCLCHECK(allocateArgs(connector->comm, &op));memcpy(op, args, sizeof(struct ncclProxyArgs));op->connector = connector;op->progress = connector->transportComm->proxy;op->state = ncclProxyOpReady;ProxyAppend(connector, op);return ncclSuccess;
} 然后执行ProxyAppend。
static void ProxyAppend(struct ncclConnector* connector, struct ncclProxyArgs* args) {struct ncclComm* comm = connector->comm;struct ncclProxyState* state = &comm->proxyState;pthread_mutex_lock(&state->mutex);if (connector->proxyAppend == NULL) {// Nothing running for that peer. Add to the circular listif (state->ops == NULL) {// Create the listargs->next = args;state->ops = args;} else {// Insert element in the listargs->next = state->ops->next;state->ops->next = args;}connector->proxyAppend = args;} else {// There is an active operation already for that peer.// Add it to the per-peer listconnector->proxyAppend->nextPeer = args;connector->proxyAppend = args;}pthread_mutex_unlock(&state->mutex);
}
ncclProxyArgs被组织成图一分层的链式结构,comm中的proxyState->ops为第一层的第一个args,图中纵向的一列表示在同一个connector上边的所有args,第一层(黄色框)为该connector的第一个args,第二层(绿色框)为该connector的第二个args,层间通过next_peer指针索引;一行就是所有connector的对应位置的args,层内通过next指针索引。
proxy线程
然后看下刚提到的proxy线程,在initTransportsRank的时候通过ncclProxyCreate创建了proxy线程执行persistentThread,创建的时候由于还没有执行过ProxyAppend,所以comm中的proxyState->op为null,所以线程就阻塞在state->cond。
void* persistentThread(void *comm_) {struct ncclComm* comm = (struct ncclComm*)comm_;struct ncclProxyState* state = &comm->proxyState;struct ncclProxyArgs* op = NULL;ncclResult_t ret = ncclSuccess;int idle = 1;int idleSpin = 0;while (1) {do {if (*comm->abortFlag) return NULL;if (op == NULL) {pthread_mutex_lock(&state->mutex);op = state->ops;if (op == NULL) {if (state->stop) {// No more commands to process and proxy has been requested to stoppthread_mutex_unlock(&state->mutex);return NULL;}pthread_cond_wait(&state->cond, &state->mutex);}pthread_mutex_unlock(&state->mutex);}} while (op == NULL);...}
}当有ProxyArgs被添加进来并唤醒proxy线程之后,proxy线程就开始执行图一的第一层args,拿到第一个args op,然后执行op的progress函数,对于send场景,progress就是netTransport的netSendProxy,receive就是netRecvProxy。执行op的progress之后遍历到下一个args next,如果next的状态不是ncclProxyOpNone,表示next还没有执行结束,那么将op设置为next,下一次将会执行next;如果状态为ncclProxyOpNone,表示next已经执行完成,那么需要将next从args链中去除,这个时候尝试将next的next_peer替换next,如果next没有next_peer,那么直接将next从第一层链中删除,否则将next_peer提到第一层链来替换next。
void* persistentThread(void *comm_) {...while (1) {...op->idle = 0;// opCount >= lastOpCount are part of an ongoing GroupStart/GroupEnd that hasn't started// yet and might be cancelled before they even start. Hold on on those.if (op->state != ncclProxyOpNone && op->opCount < comm->lastOpCount) ret = op->progress(op);if (ret != ncclSuccess) {comm->fatalError = ret;INFO(NCCL_ALL,"%s:%d -> %d [Proxy Thread]", __FILE__, __LINE__, ret);return NULL;}idle &= op->idle;pthread_mutex_lock(&state->mutex);if (!idle) idleSpin = 0;struct ncclProxyArgs *next = op->next;if (next->state == ncclProxyOpNone) {struct ncclProxyArgs *freeOp = next;if (next->nextPeer) {// Replace next by its next per-peer element.next = next->nextPeer;if (op != freeOp) {next->next = freeOp->next;op->next = next;} else {next->next = next;}} else {// Remove next from circular listnext->connector->proxyAppend = NULL;if (op != freeOp) {next = next->next;op->next = next;} else {next = NULL;}}if (freeOp == state->ops) state->ops = next;freeOp->next = state->pool;state->pool = freeOp;}op = next;if (op == state->ops) {if (idle == 1) {if (++idleSpin == 10) {sched_yield();idleSpin = 0;}}idle = 1;}pthread_mutex_unlock(&state->mutex);}
}然后看下是如何唤醒proxy线程的,在执行scheduleSendRecv之后,通过ncclBarrierEnqueue启动了kernel。
ncclResult_t ncclGroupEnd() {...for (int i=0; ifuncType == ASYNC_FUNC_COLL) {if (args->coll.comm->userStream == NULL)CUDACHECKGOTO(cudaSetDevice(args->coll.comm->cudaDev), ret, end);NCCLCHECKGOTO(ncclBarrierEnqueue(args->coll.comm), ret, end);}}for (int i=0; ifuncType == ASYNC_FUNC_COLL) {CUDACHECKGOTO(cudaSetDevice(args->coll.comm->cudaDev), ret, end);NCCLCHECKGOTO(ncclBarrierEnqueueWait(args->coll.comm), ret, end);}}for (int i=0; ifuncType == ASYNC_FUNC_COLL) {if (args->coll.comm->userStream == NULL)CUDACHECKGOTO(cudaSetDevice(args->coll.comm->cudaDev), ret, end);NCCLCHECKGOTO(ncclEnqueueEvents(args->coll.comm), ret, end);}}...
} 然后在ncclBarrierEnqueueWait中会执行ncclProxyStart,这里会通过pthread_cond_signal唤醒阻塞在proxyState.cond里边的proxy线程。
ncclResult_t ncclProxyStart(struct ncclComm* comm) {pthread_mutex_lock(&comm->proxyState.mutex);if (comm->proxyState.ops != NULL)pthread_cond_signal(&comm->proxyState.cond);pthread_mutex_unlock(&comm->proxyState.mutex);return ncclSuccess;
}队列的创建
首先看下send端的proxy线程和kernel是如何协作的,类似单机内部send和recv之间的队列,proxy和kernel间也是通过这种生产者消费者队列来协调的,整体结构如下图所示
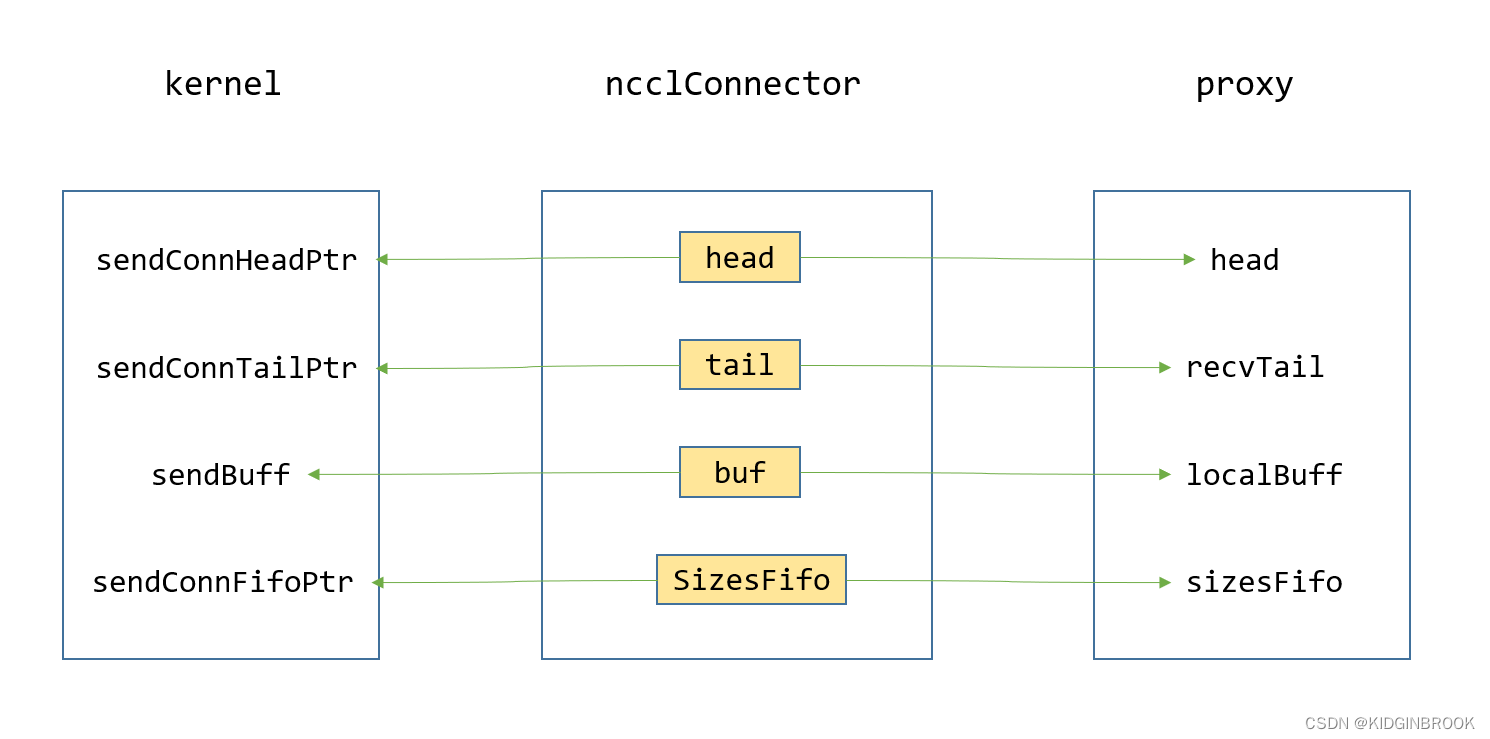
回顾下通信连接建立的过程中,send端会执行netSendSetup分配通信过程中需要的变量,如图二的ncclConnector。
ncclResult_t netSendSetup(struct ncclTopoSystem* topo, struct ncclTopoGraph* graph, struct ncclPeerInfo* myInfo, struct ncclPeerInfo* peerInfo, struct ncclConnect* connectInfo, struct ncclConnector* send, int channelId) {...NCCLCHECK(ncclCudaHostCalloc(&resources->sendMem, 1));NCCLCHECK(ncclCudaHostCalloc(&resources->recvMem, 1));send->conn.direct |= resources->useGdr ? NCCL_DIRECT_NIC : 0;send->conn.tail = &resources->recvMem->tail;send->conn.fifo = resources->recvMem->sizesFifo;send->conn.head = &resources->sendMem->head;for (int i=0; iconn.fifo[i] = -1;...if (resources->buffSizes[LOC_DEVMEM]) {NCCLCHECK(ncclCudaCalloc(resources->buffers+LOC_DEVMEM, resources->buffSizes[LOC_DEVMEM]));}...int offsets[LOC_COUNT];offsets[LOC_HOSTMEM] = offsets[LOC_DEVMEM] = 0;for (int p=0; pmhandlesProto[p] = resources->mhandles+protoLoc[p];send->conn.buffs[p] = resources->buffers[protoLoc[p]] + offsets[protoLoc[p]];offsets[protoLoc[p]] += buffSizes[p];}...return ncclSuccess;
} 核心就是队列的head,tail和SizesFifo,通信过程中的buf,这些都会保存到connector的conn中。对于kernel端,当执行了loadSendConn和loadSendSync之后kernel就持有了ncclConnector的变量,如图二左侧框。
__device__ __forceinline__ void loadSendConn(struct ncclConnInfo* conn, int i) {sendBuff[i] = (T*)conn->buffs[NCCL_PROTO_SIMPLE];sendStep[i] = conn->step;...}__device__ __forceinline__ void loadSendSync() {if (tid < nsend) {sendConnHeadPtr = sendConn->head;sendConnHeadCache = *sendConnHeadPtr;sendConnFifoPtr = sendConn->fifo;}if (tid >= nthreads && widtail;}} 对于proxy线程,ncclConnector被保存到了ncclProxyArgs中,所以proxy也可以拿到这些变量,如图二的右侧框。
队列的运行
然后分别从kernel视角和proxy视角看下这个队列如何运行的。

对于kernel端,如图三,过程和单机一致,在搬运数据之前,通过判断sendConnHeadPtr和sendConnTailPtr之间的距离来判断队列是否已满,注意这里sendConnHead其实是sendConnTailPtr。
inline __device__ void waitSend(int nbytes) {spins = 0;if (sendConnHeadPtr) {while (sendConnHeadCache + NCCL_STEPS < sendConnHead + SLICESTEPS) {sendConnHeadCache = *sendConnHeadPtr;if (checkAbort(wid, 1)) break;}if (sendConnFifoPtr) {sendConnFifoPtr[sendConnHead%NCCL_STEPS] = nbytes;}sendConnHead += SLICESTEPS;}}每当新搬运了一块数据,就将sendConnTailPtr加一。
inline __device__ void postSend() {if (sendConnTailPtr) *sendConnTailPtr = sendConnTail += SLICESTEPS;
}同样的队列在proxy端的视角如图四
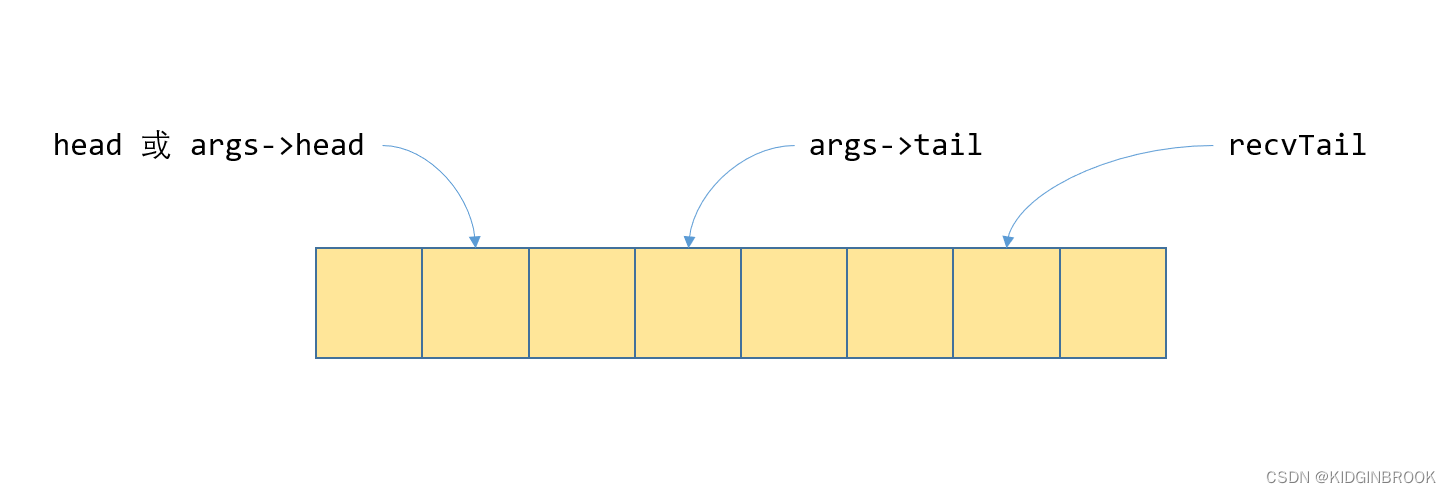
recvTail由kernel更新,表示kernel端产生了这么多的数据,head由proxy更新,表示proxy完成了这些数据的发送;由于proxy使用异步发送,所以引入了tail变量,head和tail之间的数据为proxy之星了异步发送,但还没确定发送完成,tail和recvTail之间为proxy还没有执行发送的数据。
具体看下,proxy拿到一个新的ncclProxyArgs args(state为ncclProxyOpReady)之后,首先计算head,tail和end,其中head和tail表示队列的首尾,end表示完成当前这个args的数据发送一共需要多少步,然后状态转变为ncclProxyOpProgress
ncclResult_t netSendProxy(struct ncclProxyArgs* args) {struct netSendResources* resources = (struct netSendResources*) (args->connector->transportResources);if (args->state == ncclProxyOpReady) {// Round to next multiple of sliceStepsresources->step = ROUNDUP(resources->step, args->chunkSteps);args->head = resources->step;args->tail = resources->step;args->end = args->head + args->nsteps;args->state = ncclProxyOpProgress;}...return ncclSuccess;
}单机过程中的队列其实是逻辑的,并没有实际分配一个队列,多机这里可以将sizesFifo理解为实际分配的队列,fifo中每一项代表了这块数据的长度,可以看到proxy在拿到fifo对应项之后直接通过ncclNetIsend执行数据的发送过程。
ncclResult_t netSendProxy(struct ncclProxyArgs* args) {struct netSendResources* resources = (struct netSendResources*) (args->connector->transportResources);...if (args->state == ncclProxyOpProgress) {int p = args->protocol;int stepSize = args->connector->comm->buffSizes[p] / NCCL_STEPS;char* localBuff = args->connector->conn.buffs[p];void* mhandle = *(resources->mhandlesProto[p]);args->idle = 1;if (args->head < args->end) {int buffSlot = args->tail%NCCL_STEPS;if (args->tail < args->end && args->tail < args->head + NCCL_STEPS) {volatile int* sizesFifo = resources->recvMem->sizesFifo;volatile uint64_t* recvTail = &resources->recvMem->tail;if (args->protocol == NCCL_PROTO_LL128) {...} else if (args->protocol == NCCL_PROTO_LL) {...} else if (args->tail < *recvTail) {// Send through networkif (sizesFifo[buffSlot] != -1) {NCCLCHECK(ncclNetIsend(resources->netSendComm, localBuff+buffSlot*stepSize, sizesFifo[buffSlot], mhandle, args->requests+buffSlot));if (args->requests[buffSlot] != NULL) {sizesFifo[buffSlot] = -1;// Make sure size is reset to zero before we update the head.__sync_synchronize();args->tail += args->sliceSteps;args->idle = 0;}}}}...}...}return ncclSuccess;
}如果head小于tail,说明有执行了异步发送的请求,通过ncclNetTest判断是否发送完成,如果发送完成了,那么更新head。最后如果head等于end,说明这个args执行完成了,将state转为ncclProxyOpNone。
ncclResult_t netSendProxy(struct ncclProxyArgs* args) {struct netSendResources* resources = (struct netSendResources*) (args->connector->transportResources);...if (args->state == ncclProxyOpProgress) {...if (args->head < args->end) {int buffSlot = args->tail%NCCL_STEPS;...if (args->head < args->tail) {int done;int buffSlot = args->head%NCCL_STEPS;NCCLCHECK(ncclNetTest(args->requests[buffSlot], &done, NULL));if (done) {args->head += args->sliceSteps;resources->sendMem->head = args->head;args->idle = 0;}}}if (args->head == args->end) {resources->step = args->end;args->idle = 0;args->state = ncclProxyOpNone;}}return ncclSuccess;
}网络通信过程
然后以rdma为例看下send端和recv端是如何配合的。以rdma send/recv为例,当send端执行rdma send的时候,要求recv端已经post过一个wr到rq里,否则将会报错,为了解决这个问题,在send和recv的两个proxy之间,也引入了一个fifo,如图五所示

struct ncclIbSendFifo {uint64_t addr;int size;uint32_t seq;uint32_t rkey;uint32_t ready;
};fifo中每个元素为ncclIbSendFifo,fifoHead由send端持有,remFifo.tail由recv端持有。对于rdma send/recv来说最重要的是ready字段,其他为rdma write场景用的。fifo是由send端创建的,在rdma建链过程中的ncclIbConnect里会将fifo对应内存注册,然后通过socket将fifo地址和rkey发送给recv端,recv端在每次往rq中下发一个wr之后会通过rdma write写send端fifo的tail对应的ncclIbSendFifo,send端只有在fifoHead位置的ready为1才能执行send。
这里多说一个疑问,在rdma write的场景中还需要ncclIbSendFifo的addr和rkey等字段,假设fifo中fifoHead位置叫slot,当使用rdma write的时候,发现slot->ready为1后,如何保证slot->addr等字段是可用的(网卡已经写完成),在咨询Tuvie大佬之后,因为slot的大小较小,会在同一个PCIe tlp中,又因为ready为最后的位置,所以可保证ready可用的时候,其他字段均可用。
然后看下ncclIbSend的逻辑,首先通过fifoHead获取到fifo中对应的slot,判断ready,如果为1则可以发送,然后通过ncclIbGetRequest获取一个req,req表示当前这个请求,之后会通过req判断这个通信是否完成。然后设置wr,这里将wr_id设置为req的地址以方便之后判断请求是否完成,然后post到sq中就返回,并将req存到fifo的对应位置。
ncclResult_t ncclIbIsend(void* sendComm, void* data, int size, void* mhandle, void** request) {struct ncclIbSendComm* comm = (struct ncclIbSendComm*)sendComm;if (comm->ready == 0) NCCLCHECK(ncclSendCheck(comm));if (comm->ready == 0) { *request = NULL; return ncclSuccess; }struct ibv_mr* mr = (struct ibv_mr*)mhandle;// Wait for the receiver to have posted the corresponding receivevolatile struct ncclIbSendFifo* slot = comm->fifo + (comm->fifoHead%MAX_REQUESTS);volatile uint32_t * readyPtr = &slot->ready;if (*readyPtr == 0) { *request = NULL; return ncclSuccess; }struct ncclIbRequest* req;NCCLCHECK(ncclIbGetRequest(comm->reqs, &req));req->verbs = &comm->verbs;req->size = size;struct ibv_send_wr wr;memset(&wr, 0, sizeof(wr));wr.wr_id = (uint64_t)req;struct ibv_sge sge;if (size == 0) {wr.sg_list = NULL;wr.num_sge = 0;} else {sge.addr=(uintptr_t)data; sge.length=(unsigned int)size; sge.lkey=mr->lkey;wr.sg_list = &sge;wr.num_sge = 1;}wr.opcode = IBV_WR_SEND;wr.send_flags = IBV_SEND_SIGNALED;int useAr = 0;if (size > ncclParamIbArThreshold()) {useAr = 1;}// We must clear slot->ready, but reset other fields to aid// debugging and sanity checksslot->ready = 0;slot->addr = 0ULL;slot->rkey = slot->size = slot->seq = 0;comm->fifoHead++;struct ibv_send_wr* bad_wr;NCCLCHECK(wrap_ibv_post_send(comm->qp, &wr, &bad_wr));*request = req;return ncclSuccess;
}然后看下ncclIbTest,判断指定的req是否发送完成,根据req获取对应的cq,然后执行ibv_poll_cq获取到wc,通过wc拿到wr_id,wr_id为对应的req,然后设置这个req的done为1;然后循环直到指定的req->done为1。
ncclResult_t ncclIbTest(void* request, int* done, int* size) {struct ncclIbRequest *r = (struct ncclIbRequest*)request;*done = 0;while (1) {if (r->done == 1) {*done = 1;if (size) *size = r->size;r->used = 0;return ncclSuccess;}int wrDone = 0;struct ibv_wc wcs[4];NCCLCHECK(wrap_ibv_poll_cq(r->verbs->cq, 4, wcs, &wrDone));if (wrDone == 0) return ncclSuccess;for (int w=0; wstatus != IBV_WC_SUCCESS) {WARN("NET/IB : Got completion with error %d, opcode %d, len %d, vendor err %d", wc->status, wc->opcode, wc->byte_len, wc->vendor_err);return ncclSystemError;}struct ncclIbRequest* doneReq = (struct ncclIbRequest*)wc->wr_id;if (doneReq) {if (wc->opcode == IBV_WC_RECV) {doneReq->size = wc->byte_len;}doneReq->done = 1;if (doneReq->free == 1) {// This is an internal (FIFO post) req. Free it immediately.doneReq->used = 0;}}}}
} recv端proxy整体流程基本和send一致,不过在执行ncclIbTest之后需要执行一下ncclIbFlush。
ncclResult_t netRecvProxy(struct ncclProxyArgs* args) {...if (args->tail > args->head) {int buffSlot = args->head%NCCL_STEPS;int done, size;NCCLCHECK(ncclNetTest(args->requests[buffSlot], &done, &size));if (done) {args->head += args->sliceSteps;if (args->protocol == NCCL_PROTO_SIMPLE) {if (resources->useGdr) NCCLCHECK(ncclNetFlush(resources->netRecvComm, localBuff+buffSlot*stepSize, size, mhandle));resources->recvMem->tail = args->head;}args->idle = 0;}}...return ncclSuccess;
}
下边是之前第八节中关于flush的介绍
gpuFlush也对应一个qp,不过这个qp是local的,即他的对端qp就是自己,当开启gdr之后,每次接收数据后都需要执行一下flush,其实是一个rdma read操作,使用网卡读一下接收到的数据的第一个int到hostMem。官方issue里解释说当通过gdr接收数据完成,产生wc到cpu的时候,接收的数据并不一定在gpu端可以读到,这个时候需要在cpu端执行一下读取。
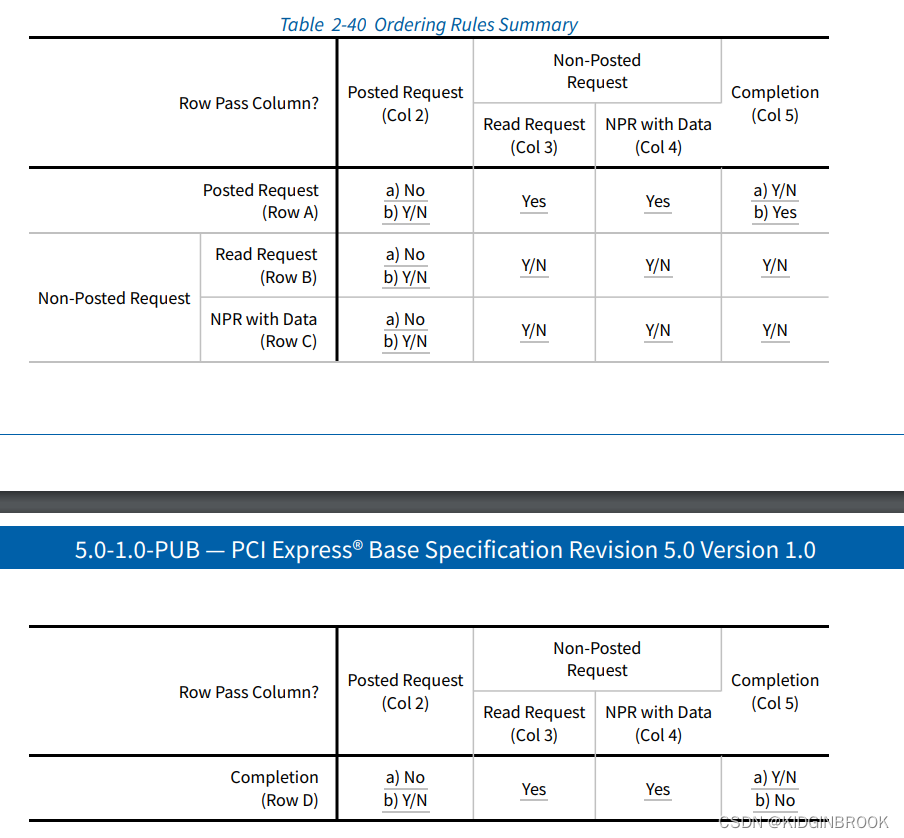
关于执行读取为什么能够保序后来咨询kkndyu大佬了解到,PCIe设备中有Transaction Ordering的概念,在同一个PCIe控制器中默认Read Request不会超过Posted Request,如下图col2
最后总结下多机通信的整体流程
- 通信由kernel和proxy线程协调完成,send端kernel负责将数据从input搬运到buf,proxy线程负责将buf中数据通过网络发送给recv端
- kernel和proxy间通过队列实现生产者消费者模式
- send端通过rdma send发送数据,和recv端通过队列实现生产者消费者模式,队列位于send端,recv端每次下发一个wr到rq之后会执行rdma write通知send端
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!