运动控制中速度前馈的作用
控制理论分析
无速度前馈时的控制框图
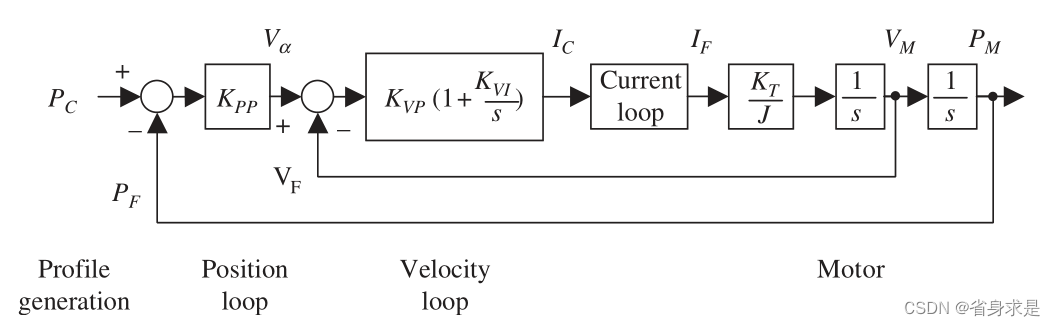
无速度前馈时的传递函数

加入速度前馈时的控制框

加入速度前馈时的传递函数

通过对比有无速度前馈时的传递函数,可以看出,加入速度前馈后,传递函数的分子中增加了s2项,该项成为分子中的最高频率项,这个改善了系统对高频指令的响应,分母则保持不变。这意味着指令响应提升了,但稳态裕度和扰动响应都没有受到损害。
参考书籍:《Control System Design Guide. Using Your Computer to Understand and Diagnose Feedback Controllers》by George Ellis
器材准备
博能传动AX-CM55 PROFINET伺服驱动器和MX系列伺服电机
西门子1515T PLC
普通丝杠滑台(螺距5mm),MX伺服电机通过联轴器直连丝杠。
实验内容
使用西门子1515T PLC通过PROFINET通信控制博能传动AX系列伺服驱动器。使用105报文+DSC,使用PLC中的轴工艺对象。PLC发位置偏差值和速度前馈值给驱动器,驱动器反馈实际位置值和实际速度值给PLC。

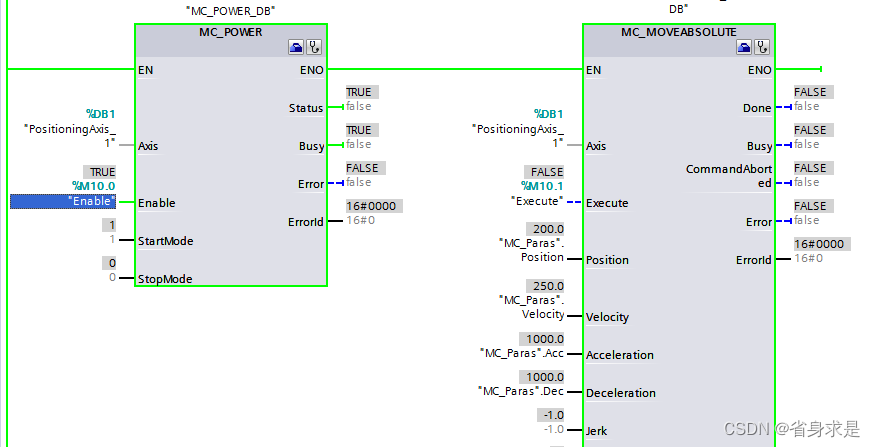
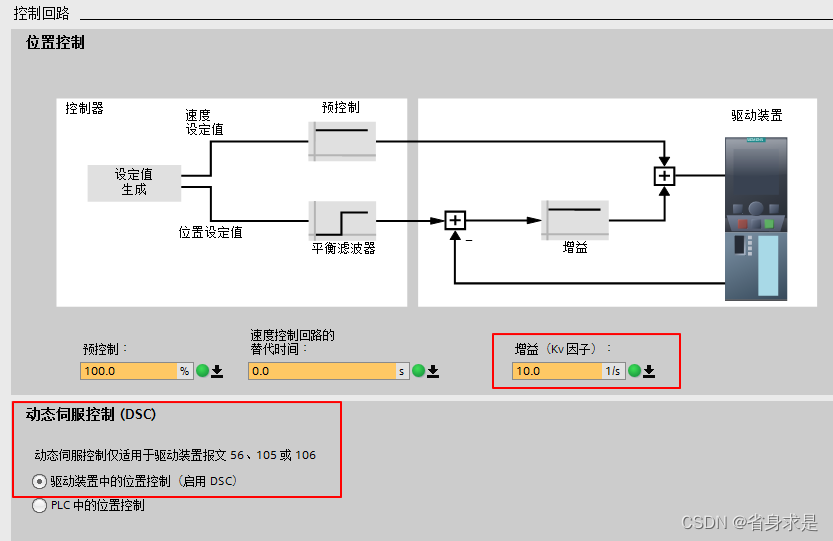
使用MC_MOVEABSOLUTE块控制滑台从-200mm位置运行到200mm位置。速度设定值为250mm/s,加速度设定值为1000mm/s2,减速度设定值为1000mm/s2。位置调节器的增益(Kv因子)默认使用10.0。速度前馈增益在驱动器参数中【G01.21 速度前馈增益】
实验结果
速度前馈增益=0%(禁止速度前馈)
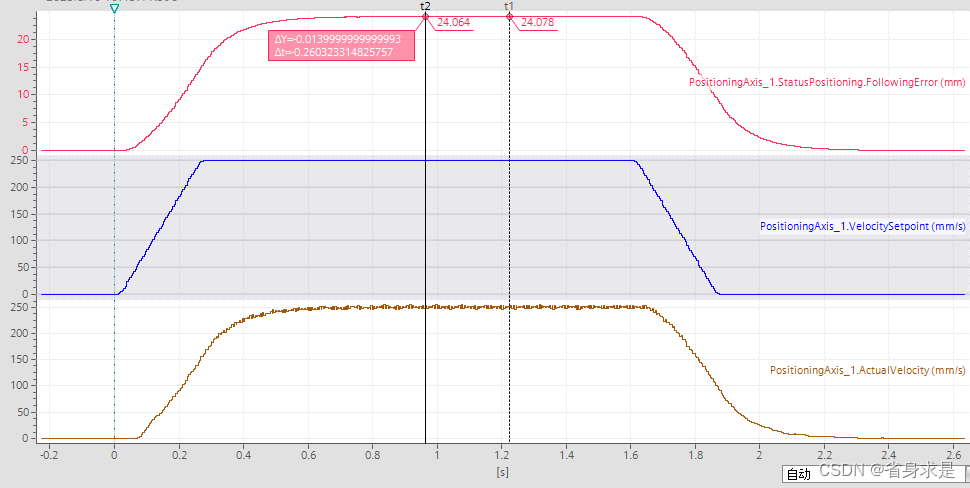
可以看到位置跟随误差的最大值在24mm。
速度前馈增益=100%
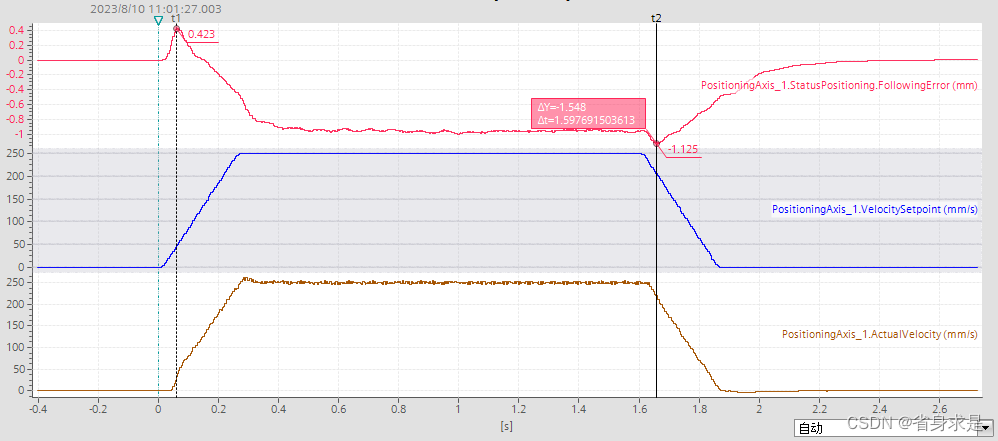
可以看到位置跟随误差的最大值-1.125mm。但此时在加速过程中出现了较为明显的速度超调。
速度前馈增益=93%

可以看到位置跟随的误差的最大值为0.8mm。
实验结论
从这个实验的结果可以清楚的看出,在伺服控制系统中速度前馈的加入极大的减少了跟随误差,提升了系统的动态性能。但速度前馈的作用过大也会引起超调。
补充说明,因为本次只探讨速度前馈的作用,所以并未调节位置调节器的增益,所以通过调节位置调节器的增益,位置跟随误差还可以进一步缩小
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!