canopen指令
can轴命令:
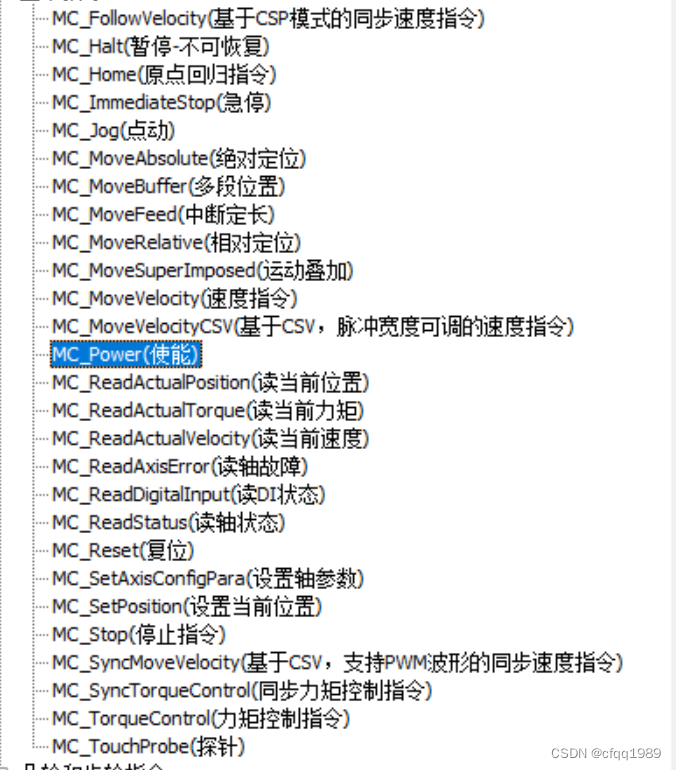
// MC_Halt_CO 暂停 【// MC_Home_CO 回原点 【// MC_Jog_CO 点动 【// MC_MoveAbsolute_CO 绝对运动 【// MC_MoveRelative_CO 相对运动 【// MC_MoveVelocity_CO 速度模式运行 【// MC_Power_CO 使能 【// MC_ReadParameter_CO 读取轴参数 【// MC_ReadStatus_CO 读取运动状态 【// MC_Reset_CO 运动状态复位 【// MC_SetOpMode_CO 设置工作模式 【// MC_Stop_CO 停止运动 【// MC_WriteParameter_CO 写轴参数 【
MC_Halt_CO暂停
MC_Home_CO原点回零
MC_Jog_CO 点动
MC_MoveAbsolute_CO绝对定位
MC_MoveRelative_CO相对定位
MC_MoveVelocity_CO速度指令
MC_Power_CO使能
MC_ReadActualPosition_CO读位置
MC_ReadActualVelocity_CO读速度
MC_ReadParameter_CO读参数
MC_Reset_CO复位
MC_Stop_CO 停止
MC_WriteParameter_CO写参数
ETC_ReadParameter_CoE 读SDO
ETC_WriteParameter_CoE写SDO
ETC_RestartMaster 重启主站//
MC_GroupPause暂停轴组
MC_GroupStop 停止轴组
MC_MoveCircular圆弧插补
MC_MoveLinear 直线插补
//
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!