项道德(daode1212,daode3056)
一,厄米多项式(Hermite polynomial)与三角函数的融合,构建了隐式方程,此方程在局部范围,呈以下图像:
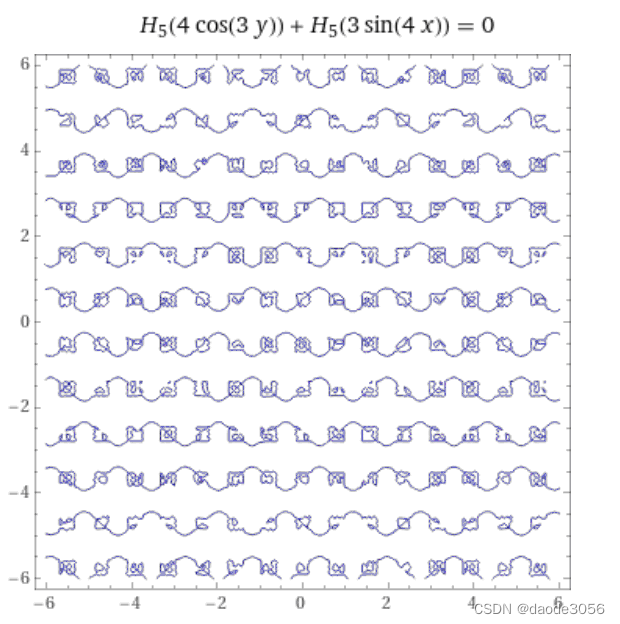
二,对图像中各曲线求方向导数,以确定虚拟搜索路径与机器人行动路径。
三,某些一阶导数、二阶导数变化较大处,作机器人环视侦察用。
四,单行表达式,最大限度地保证各行进路线的不重复,可用此方案。
作者:微信(daode1212)
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!
