相机内参外参(Intrinsics Extrinsics)
- 1 什么是内参矩阵(Intrinsic matrix)
- 2 什么是外参矩阵( extrinsic matrix)
- 3 dtu数据集中 相机内参外参 展示
深入解读相机矩阵
一文带你搞懂相机内参外参(Intrinsics & Extrinsics)
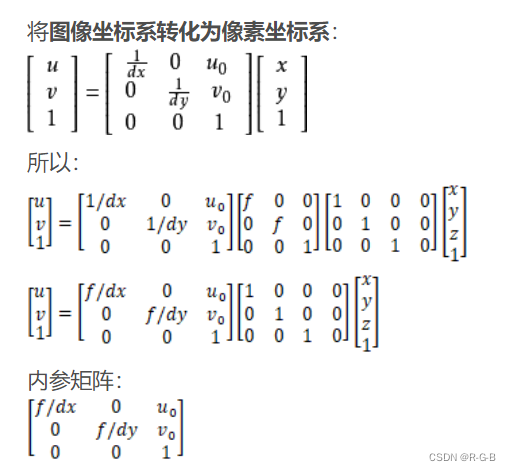
1 什么是内参矩阵(Intrinsic matrix)
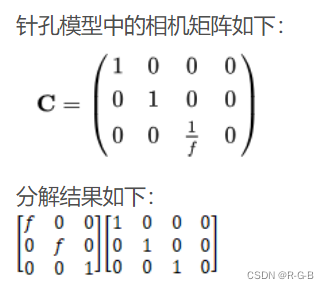
相机内参
是与相机自身特性相关的参数,比如相机的焦距、像素大小。
我们通常所说的相机内参是4个,分别为:fx、fy、u0、v0;
f:焦距,单位毫米,dx:像素x方向宽度,单位毫米本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!