RT-Thread Studio学习(十)MPU9250
RT-Thread Studio学习(十)MPU9250
- 简介
- 新建RT-Thread项目并使用外部时钟
- 设置MPU9250的驱动框架
- 驱动代码的移植
- 测试
- 总结
简介
本文将基于STM32F407VET芯片介绍如何在RT-Thread Studio开发环境下运用9轴传感器MPU9250。
新建RT-Thread项目并使用外部时钟
详细步骤参考文档《RT-Thread Studio学习(一)使用外部时钟系统》。
设置MPU9250的驱动框架
RT-Thread Studio设置
使能如下组件并进行配置:
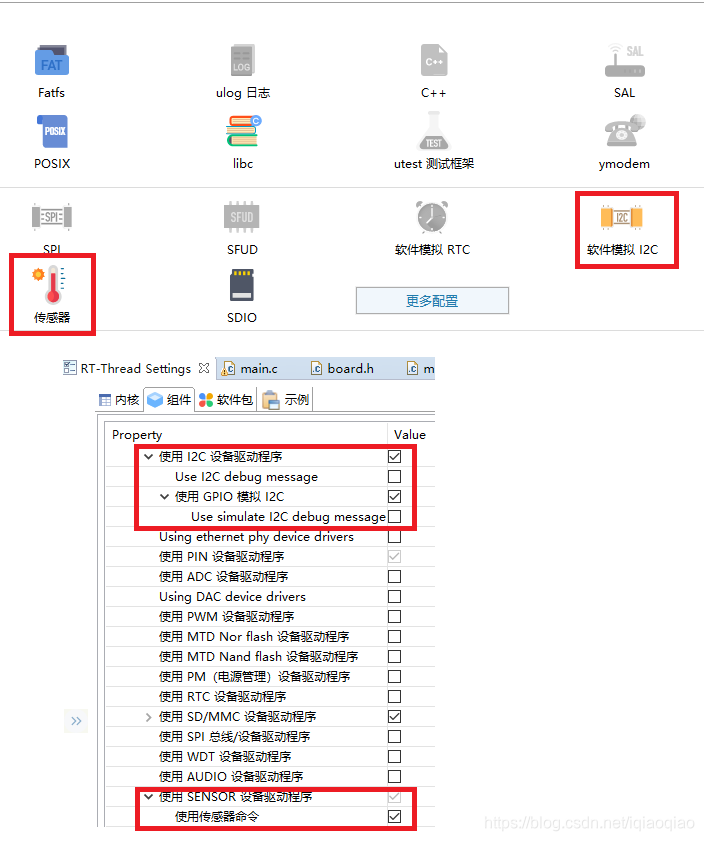
board.h文件中使能I2C1:

驱动代码的移植
参考正点原子阿波罗F429的MPU9250实验,进行了相应的移植。
首先是直接移植mpu9250.h和mpu9250.c文件,修改为app_mpu9250.h和app_mpu9250.c。
app_mpu9250.h代码如下:
/** Copyright (c) 2006-2021, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2021-06-20 Administrator the first version*/
#ifndef APPLICATIONS_APP_MPU9250_H_
#define APPLICATIONS_APP_MPU9250_H_#include app_mpu9250.c代码如下:
/** Copyright (c) 2006-2021, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2021-06-20 Administrator the first version*/
#include 在main.c的main函数主循环中添加测试代码:
mpu9250_get_temperature(temp); //得到温度值mpu9250_get_accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据mpu9250_get_gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据mpu9250_get_magnetometer(&mx, &my, &mz);rt_kprintf("%d, %d %d %d, %d %d %d, %d %d %d -- c\r\n", temp, aacx, aacy, aacz,gyrox, gyroy, gyroz, mx, my, mz);
发现能输出原始数据,但这些原始数据不解算的话没有意义,在调用mpu_dmp_init()函数时发现了很多问题。
经过反复地仔细地阅读正点原子的代码,发现仅仅将其工程下文件夹DMP复制过来是不行的,需要跟多的修改。首先是将其源代码文件复制过来,包括sys.h、sys.c、delay.h、delay.c、myiic.h、myiic.c、mpu9250.h和mpu9250.c文件。其次是studio项目属性中的设置,
添加宏定义如下:

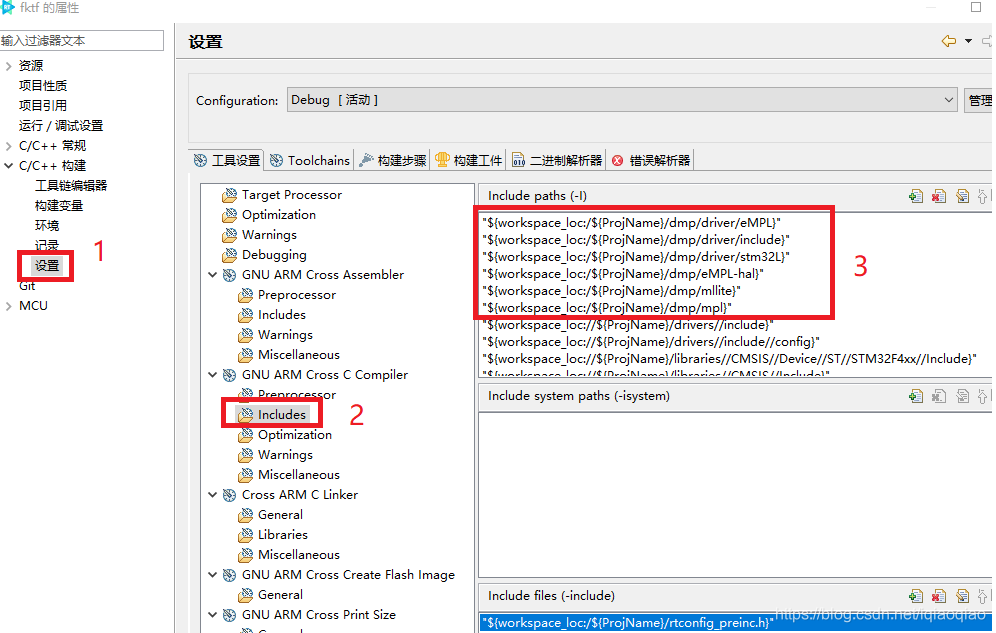
添加include路径:
添加库文件:
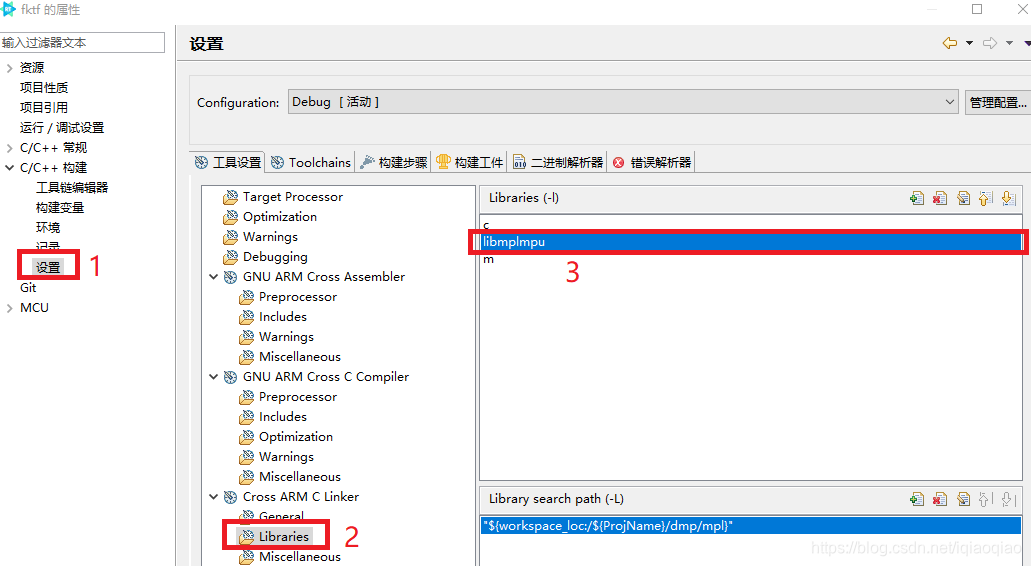
上面第三个图是添加库文件,要选择motion_driver_6.12官方原包里下的gcc编译环境对应的库文件(studio是gcc编译,正点原子是keil编译,方式不同),具体路径是“motion_driver_6.12\mpl libraries\arm\gcc4.9.3\liblibmplmpu_m4_hardfp.zip”,解压出来添加到studio项目。特别要注意的是,在添加库的时候,库文件名的前三个字母“lib”需要去掉。
测试
为了在匿名科创地面站V4显示数据波形和飞控状态,串口波特率设置为500000.
修改main函数,部分代码如下:
int main(void)
{int count = 1;u8 t=0,report=1; //默认开启上报u8 key;float pitch,roll,yaw; //欧拉角short aacx,aacy,aacz; //加速度传感器原始数据short gyrox,gyroy,gyroz; //陀螺仪原始数据short mx,my,mz; //磁力计原始数据short temp; //温度sd_rw();/* 传感器初始化 */mpu9250_init();if(MPU9250_Init()){rt_kprintf("MPU9250_Init failed! \r\n");}while(0) {temp=MPU_Get_Temperature(); //得到温度值MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据MPU_Get_Magnetometer(&mx, &my, &mz);rt_kprintf("%d, %d %d %d, %d %d %d, %d %d %d\r\n", temp, aacx, aacy, aacz,gyrox, gyroy, gyroz, mx, my, mz);rt_thread_mdelay(200);mpu9250_get_temperature(temp); //得到温度值mpu9250_get_accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据mpu9250_get_gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据mpu9250_get_magnetometer(&mx, &my, &mz);rt_kprintf("%d, %d %d %d, %d %d %d, %d %d %d -- c\r\n", temp, aacx, aacy, aacz,gyrox, gyroy, gyroz, mx, my, mz);rt_thread_mdelay(200);}rt_kprintf("mpu_dmp_init=%d\r\n",mpu_dmp_init());while(mpu_dmp_init()){rt_kprintf("MPU9250 Error\r\n");//mpu9250_sample();rt_thread_mdelay(500);}// aht10_init(AHT10_I2C_BUS_NAME);LOG_D("Enter main!\r\n");while(1){if(mpu_mpl_get_data(&pitch,&roll,&yaw)==0){temp=MPU_Get_Temperature(); //得到温度值MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据rt_thread_mdelay(10);if((t%20)==0){rt_kprintf("%d, %d %d %d, %d %d %d\r\n", temp, aacx, aacy, aacz,gyrox, gyroy, gyroz);rt_kprintf("%d, %d, %d \r\n", (int)(roll*100),(int)(pitch*100),(int)(yaw*100),0,0);}}t++;}while (count++){rt_thread_mdelay(1000);}return RT_EOK;
}
系统启动前,需要将MPU9250模块放平。两种IIC方式对比了下,都没有问题。
最后接入匿名科创地面站V4,
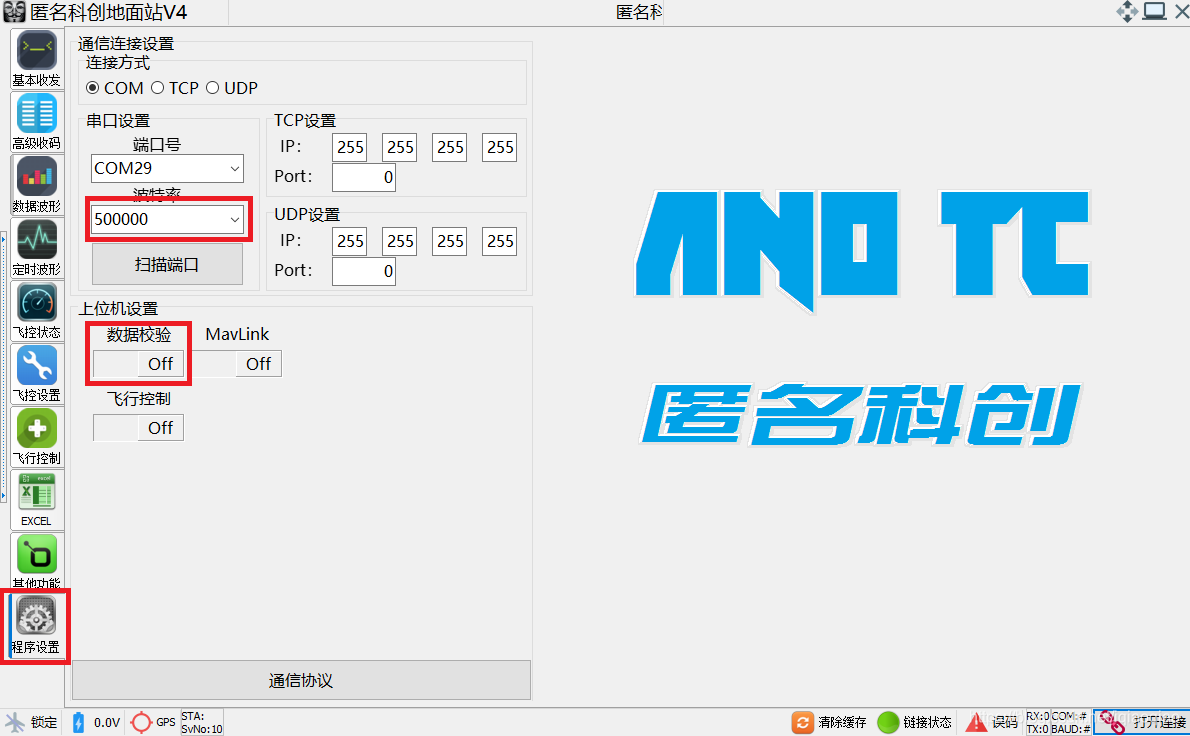
这样就可以在数据波形和飞控状态中看到东西了。
总结
本以为移植mpu9250的驱动是最难的,结果发现启用dmp才是最难的。最后为了省事,直接将正点原子的代码文件小改后复制进项目,搞得有点儿不伦不类。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!