Hector SLAM算法扫描匹配原理解析
Hector SLAM算法扫描匹配原理解析
- Hector SLAM算法扫描匹配原理解析
- 1. 相关定义
- 2. 公式推导
- 3. 代算求解
- 4. 总结和延伸
- 5. 结语
Hector SLAM算法扫描匹配原理解析
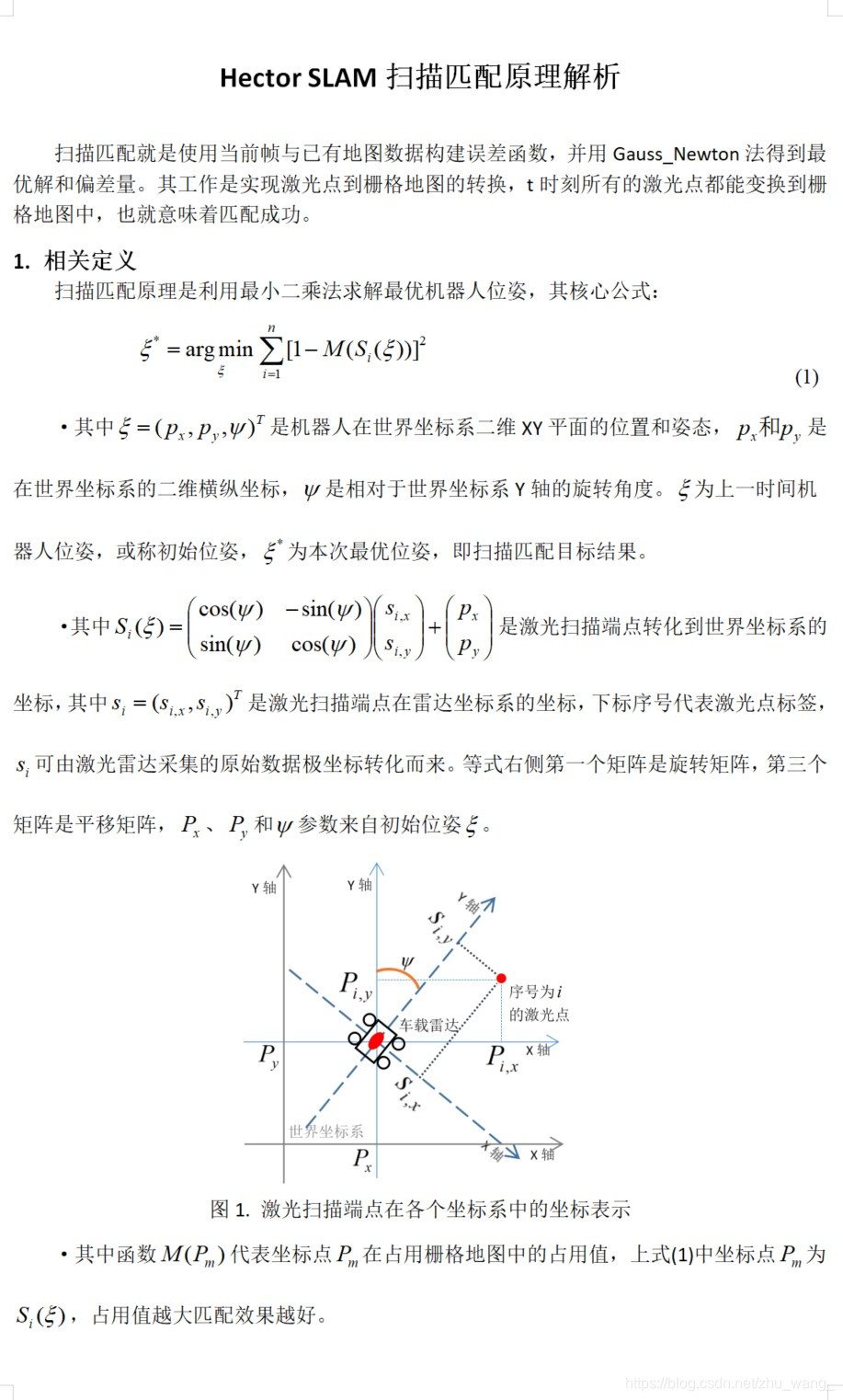
扫描匹配就是使用当前帧与已有地图数据构建误差函数,并用Gauss_Newton法得到最优解和偏差量。其工作是实现激光点到栅格地图的转换,t时刻所有的激光点都能变换到栅格地图中,也就意味着匹配成功。
1. 相关定义
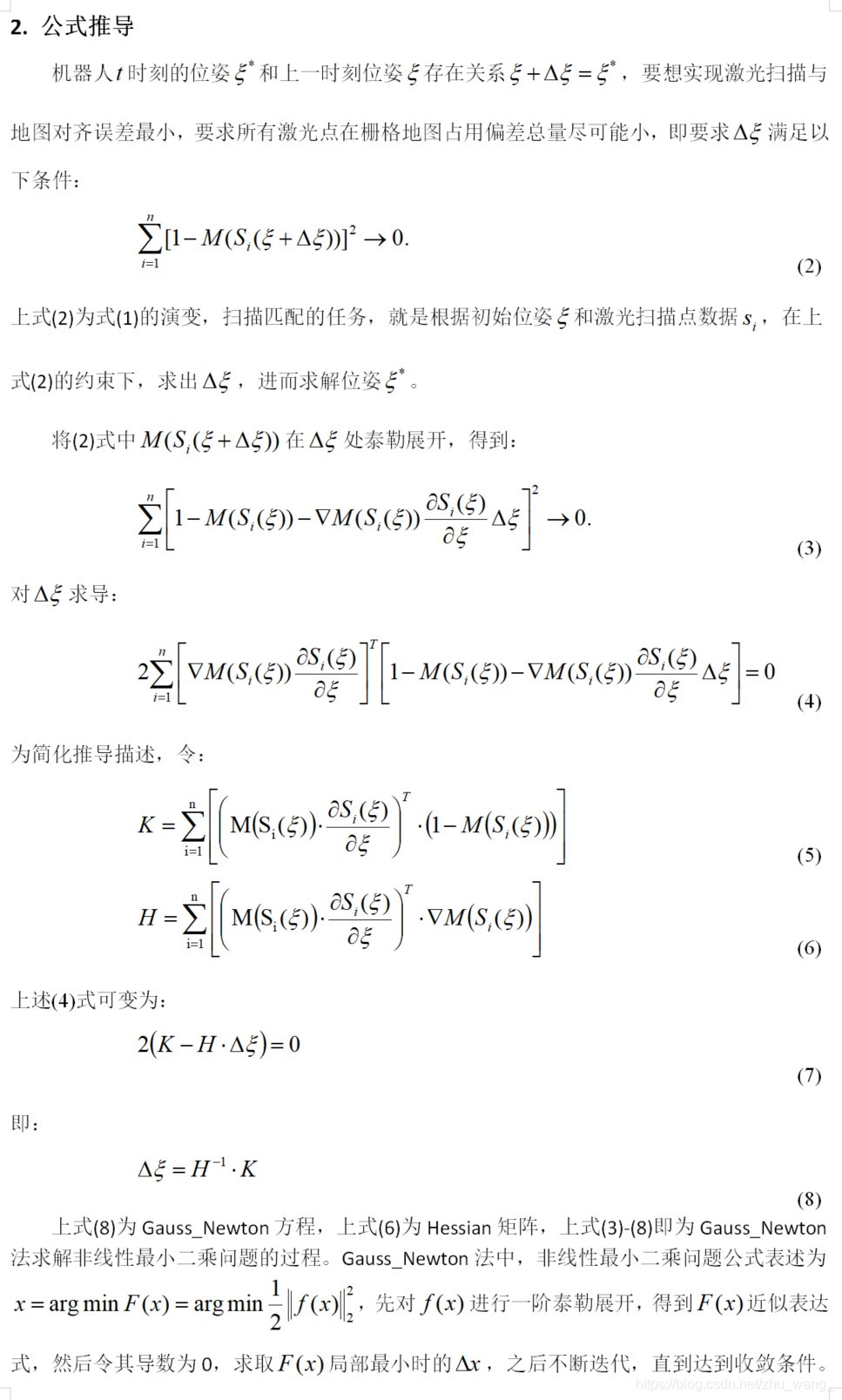
2. 公式推导
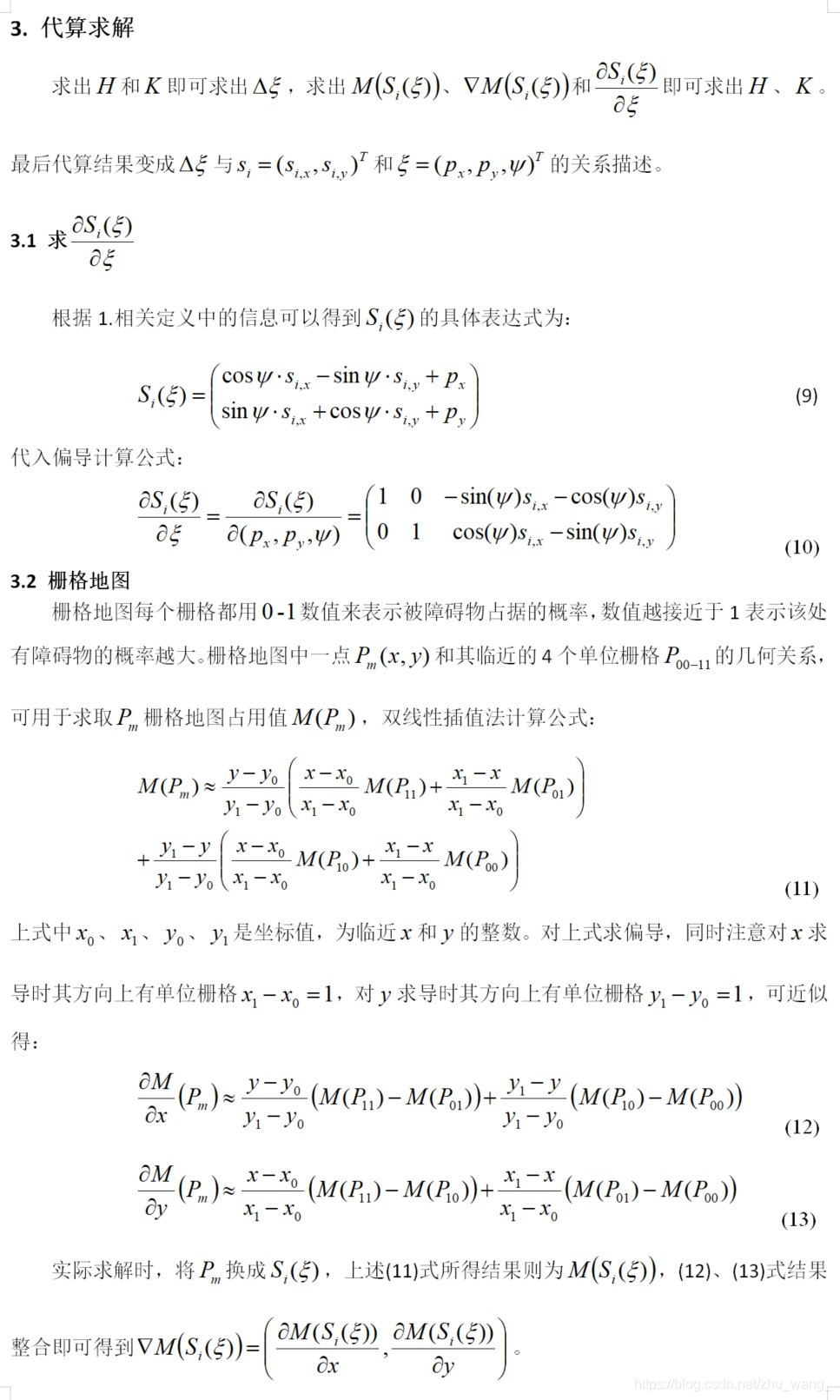
3. 代算求解
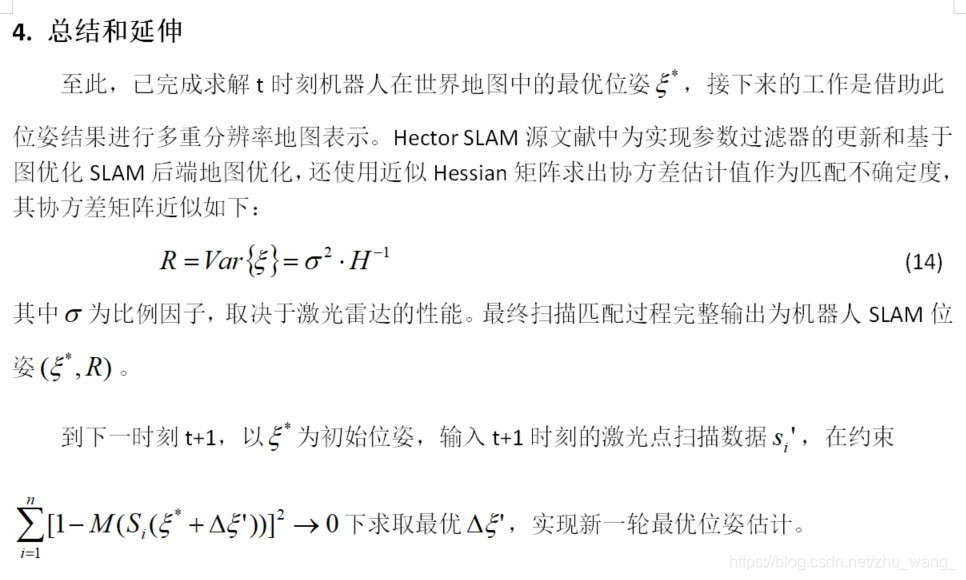
4. 总结和延伸
5. 结语
文末将附上本文的源Word文档,连同该文档一起打包的还有Hector SLAM算法源文献 “A Flexible and Scalable SLAM System with Full 3D Motion Estimation”的Word版本文档及其中文翻译Word文档。
本文难免存在错漏,期望得到慷慨指正。
Hector SLAM算法源文献Word版本资料包,百度网盘提取码为:zryg。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!