一款比较简单的iPMSM的MTPA和弱磁控制的Simpowersystem模型
1、MTPA和弱磁的理论部分
弱磁控制:电机定子电流中的直轴分量在运动中会形成对永磁体的增磁(Id>0)和弱磁(Id < 0)两个区域,而在弱磁区所形成的去磁作用可能导致永磁体性能变坏。为了避免这一问题的发生,可以使电枢电流矢量在空间上与永磁体所产生的的磁场正交,故在控制上选用的方法是:使直轴方向不流过定子电流,亦即采用 Id=0 的控制方式。
但随着永磁材料的发展,高剩磁密度和高矫顽力的永磁材料已经在伺服电机中获得了应用,在相当大的程度上已经不怕电机定子电流中的直流分量所形成的去磁作用,这就允许在直轴方向上流过较大的去磁电流,为电机的弱磁高速运行提供了可能。
————————————————
版权声明:本文为CSDN博主「小陈IT」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_44312889/article/details/121304658
在整个的弱磁升速的过程中,实际上是保持端电压不变和降低输出转矩的过程,也就是调节直轴和交轴电流分量在受限状态下的分配关系。
弱磁升速过程分析:
原理:当转速 n 继续升高时,反电动势 E 也随之升高,达到一定程度时就会受到电压和电流的限制,即“若反电动势持续增高,则会导致绕组上无法产生有效的电压差以产生电流”。若想提升转速 n,则必须抑制反电动势 E 的上升,所采用的方案是:利用负的 D 轴电流抵消一部分永磁磁链用以减小原本反电动势 E 上升的趋势。
表现: E 不继续变化,若 n 上升,则必有 Φ 下降,亦即弱磁升速。
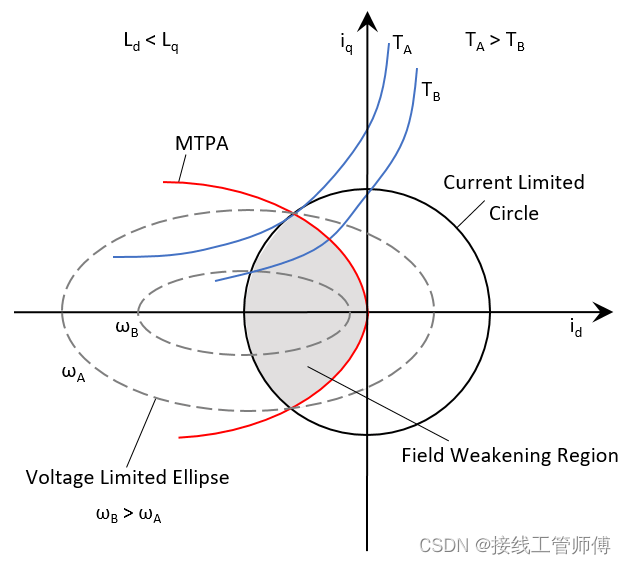
电流轨迹圆

O点:开始
A点:此时电流最大,转矩最大,MTPA轨迹与最大电流圆交点
B点C点:在同一转矩上,C点在弱磁轨迹上
F点:弱磁可以达到的最大速度点
MTPA
在MTPA阶段时,电机速度维持在基速内,为了保证电机的最高效率,此时电机运行在MTPA轨迹上。
弱磁
随着电机速度的进一步提升,此时电机已经无法保持恒转矩了,必须牺牲转矩来提升转速。
此时电流矢量需要沿着电流限制圆与不断收缩的电压限制圆的交点移动,此时的电压电流都保持在最大值,电机运行在弱磁阶段。
恒转矩弱磁
随着电机速度的提升,此时的电压限制圆在不断收缩。假设上一阶段电机以T1的转矩运行在B点,当电压圆收缩到小于B点时,此时为了维持转矩,电流矢量从B点沿着恒转矩曲线逐步左移,这一阶段可以做到保持转矩的同时提升转速。
————————————————
版权声明:本文为CSDN博主「阿礼先森」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/jiushigedidi/article/details/125557487
2、公式以及查表模型
根据公式法求MTPA轨迹可知,只要在速度闭环控制器之后输入iq给定值,便可以根据电机参数求出id iq给定值发送给电流闭环控制器。那么将电机参数进行测量、辨识后,直接使用查表的方式即可。
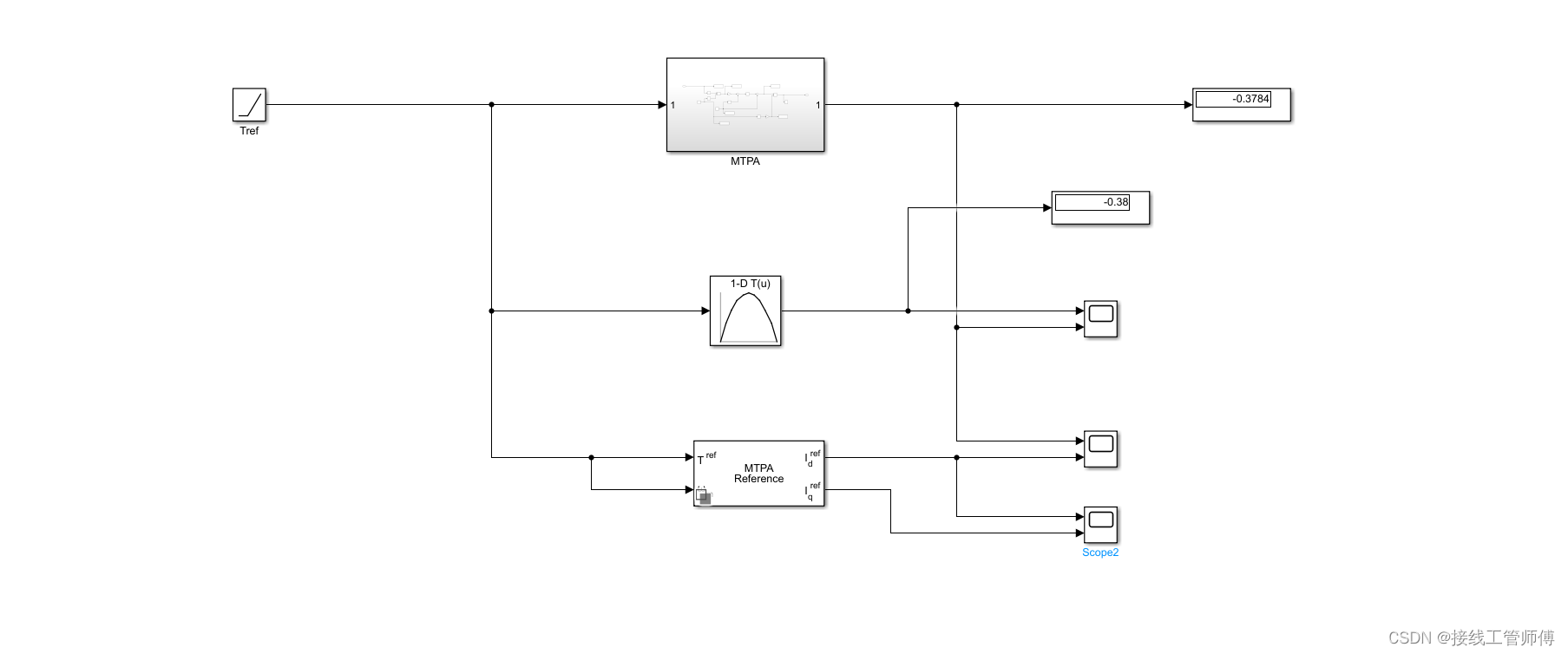
这里根据公式搭建直接计算模型,然后通过1-D Look up Table拟合出来,再对比下Motor Control Blockset / Controls / Control Reference算法库中的MTPA模型。
同理在弱磁控制中,也可以使用查表的方式来确定在折转转速后的id iq给定值。本文使用一维查表去拟合弱磁的电流曲线。
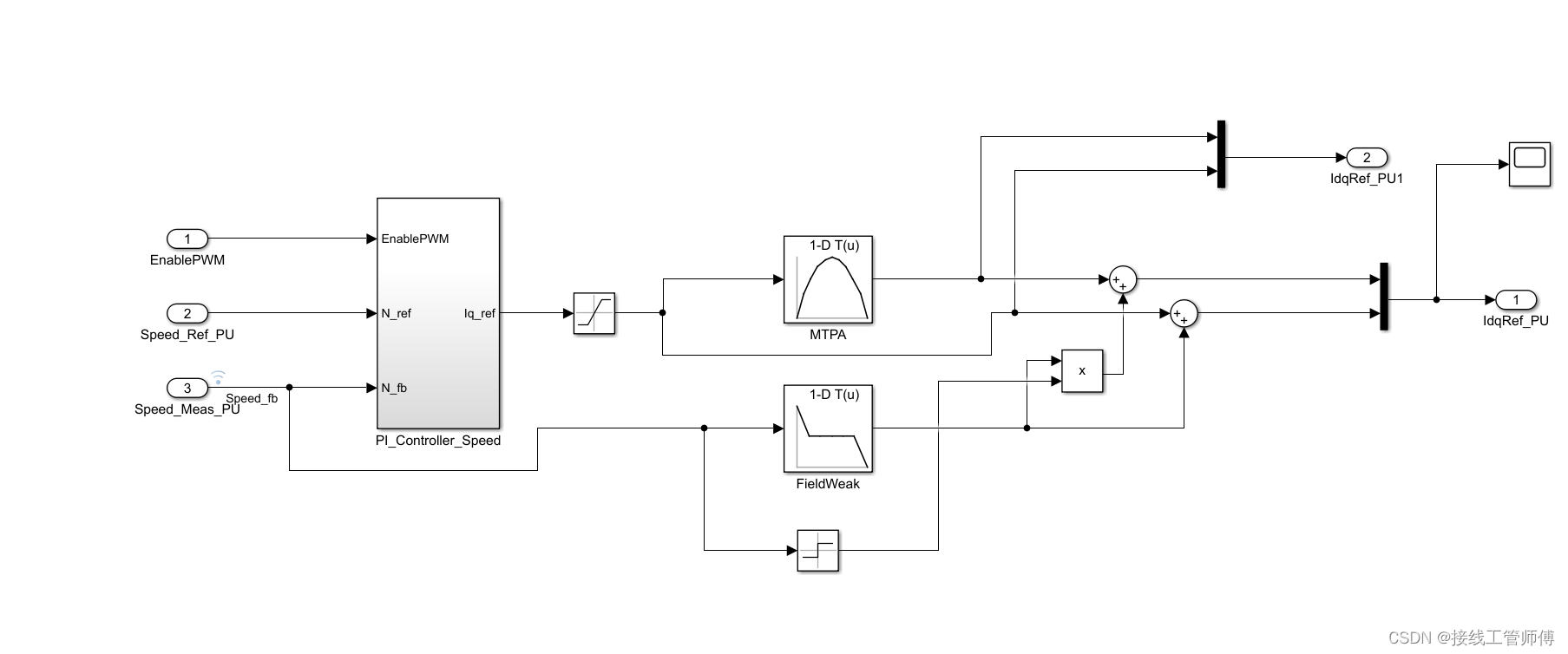
图中模型所示为速度环算法模型,速度控制器出来iqref信号,经过MTPA查表后得出idqref,在折转速度之上弱磁计算模块根据反馈的速度直接查表出来iqdref的补偿值,而后将电流给定值给到电流环。
为了对比一下效果,找到了Motor Control Blockset / Controls / Control Reference算法库中的弱磁算法模型
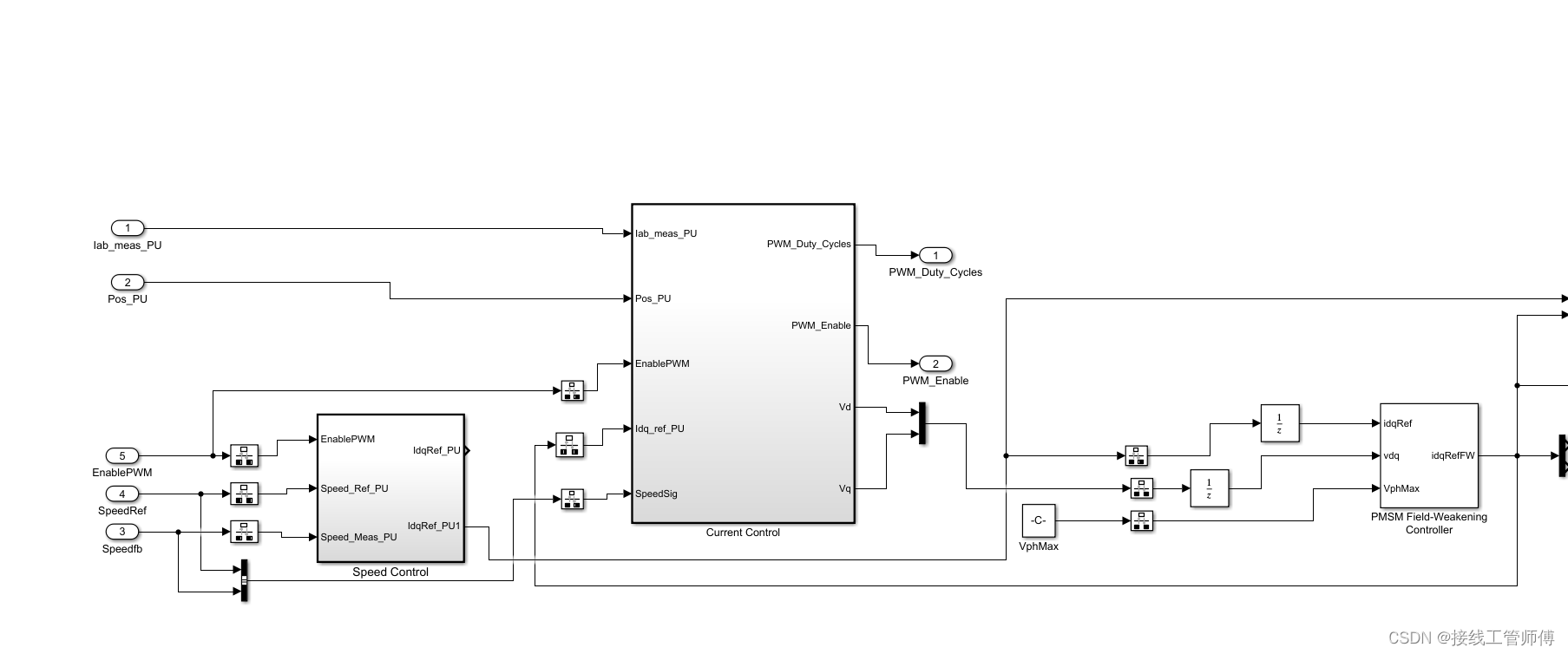
替换了一下,结果一模一样。
3、PWM的产生
马鞍波
从SVPWM发出的信号应该是幅值0-1的马鞍波,也就是逆变器三相电压对地(端电压line2GND)的等效均值。
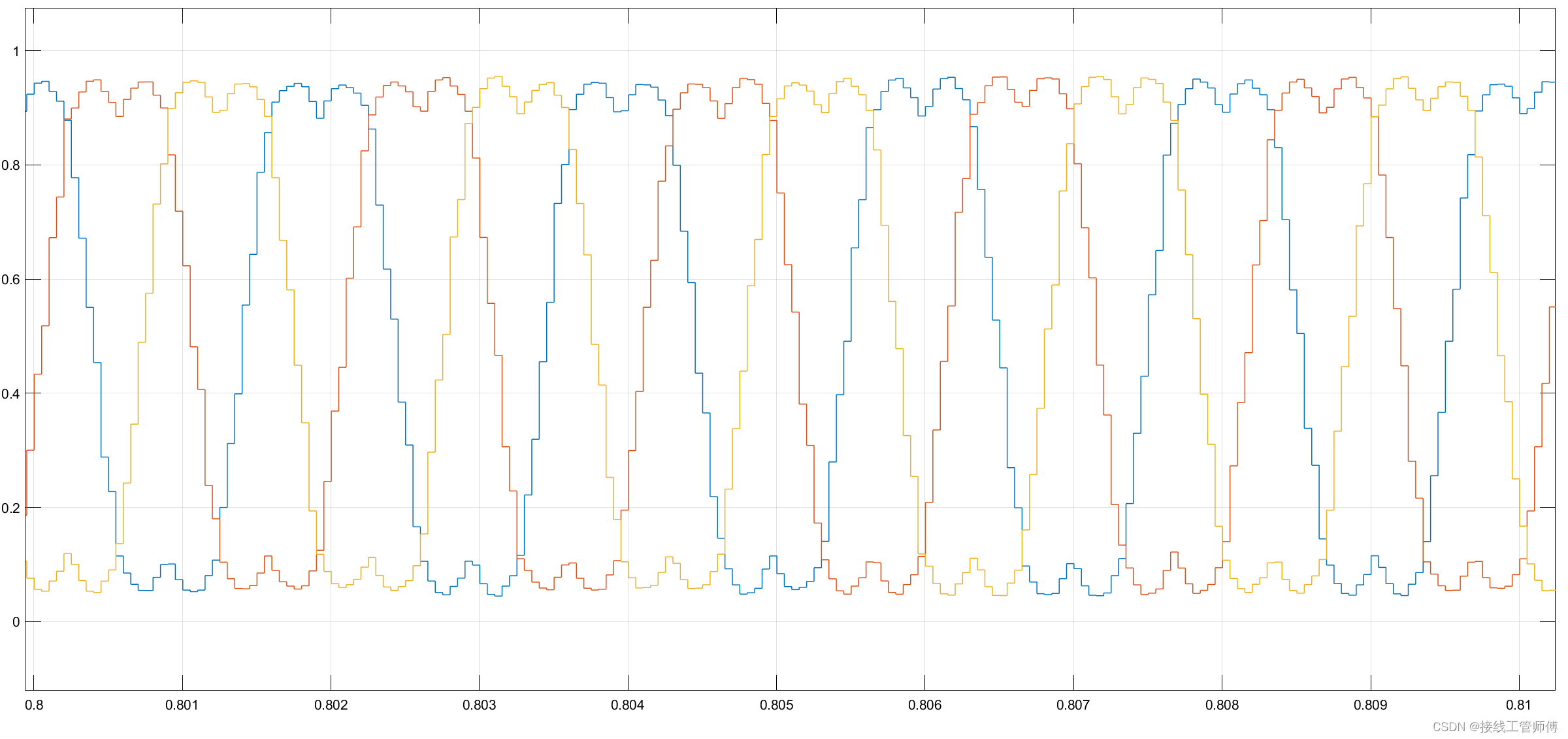
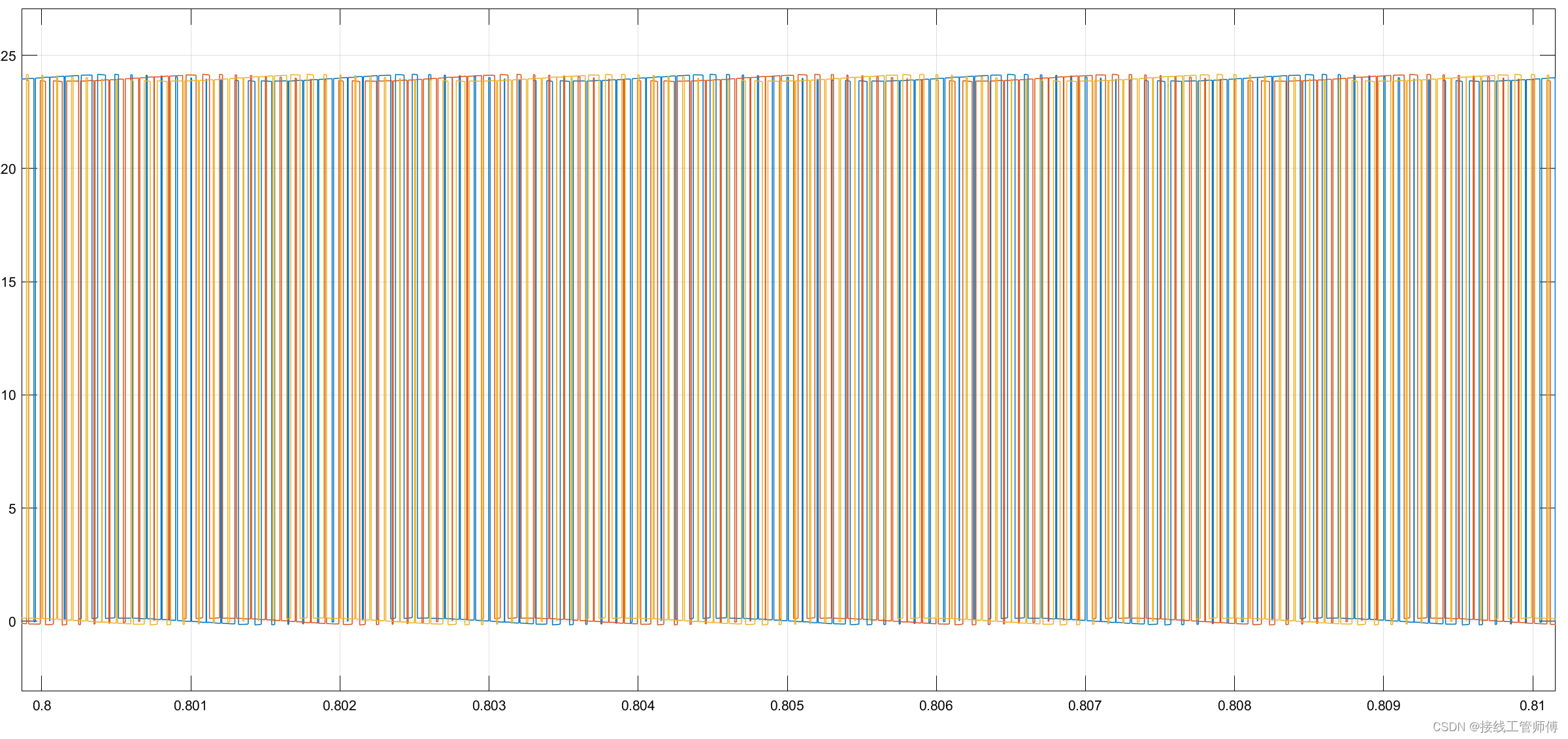
第一张图就是给逆变器的DutyCycle信号波形,对应的第二图是相对地(Phase2Ground)电压,斩波,可以脑补一下马鞍波的样子,或者滤波。
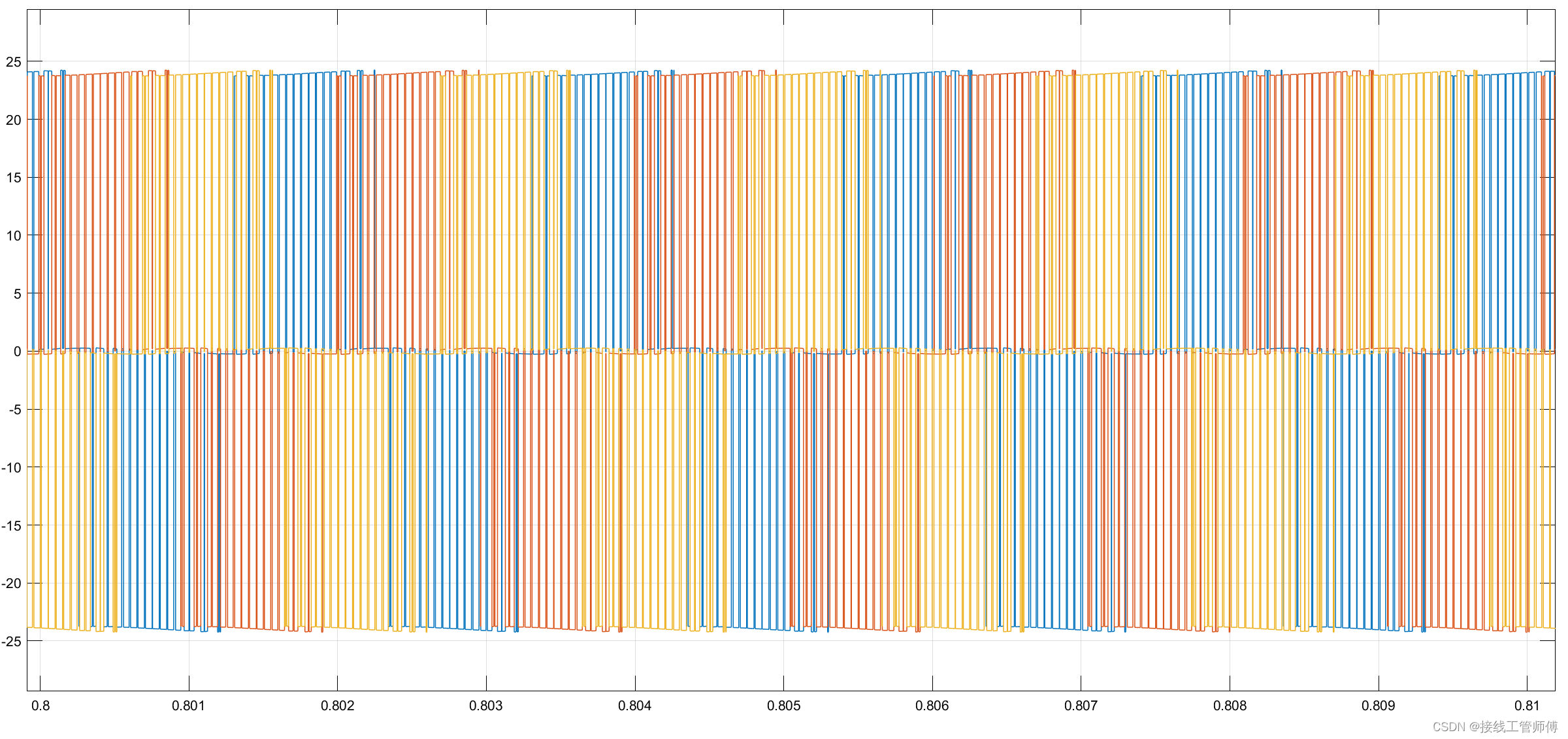
这个图就是现实中可以喜闻乐见测量出来的电压一般是线电压(Phase2Phase),波形这样的
相电流
线电压(Phase to Phase)
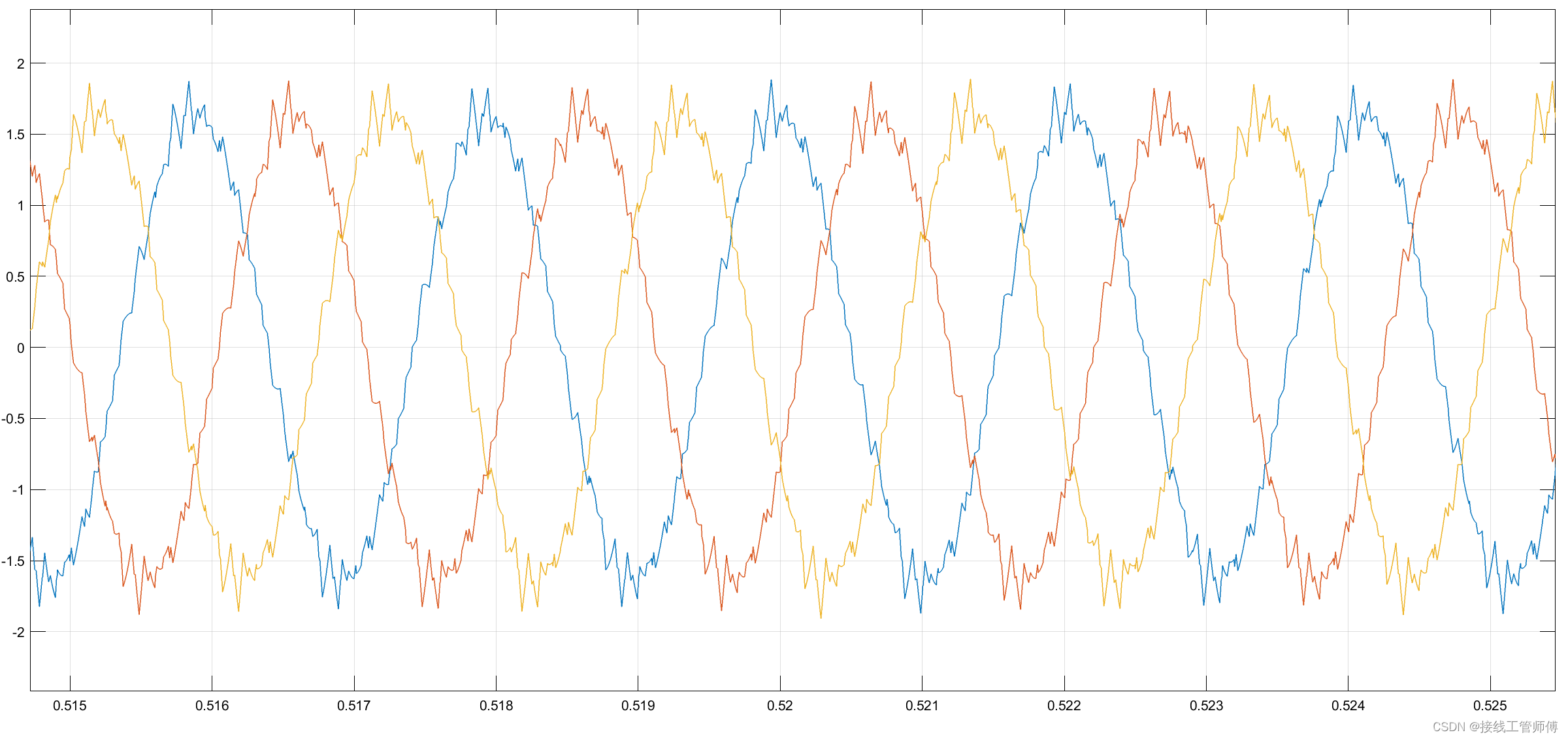
这是死区时间设定为5us的相电流波形
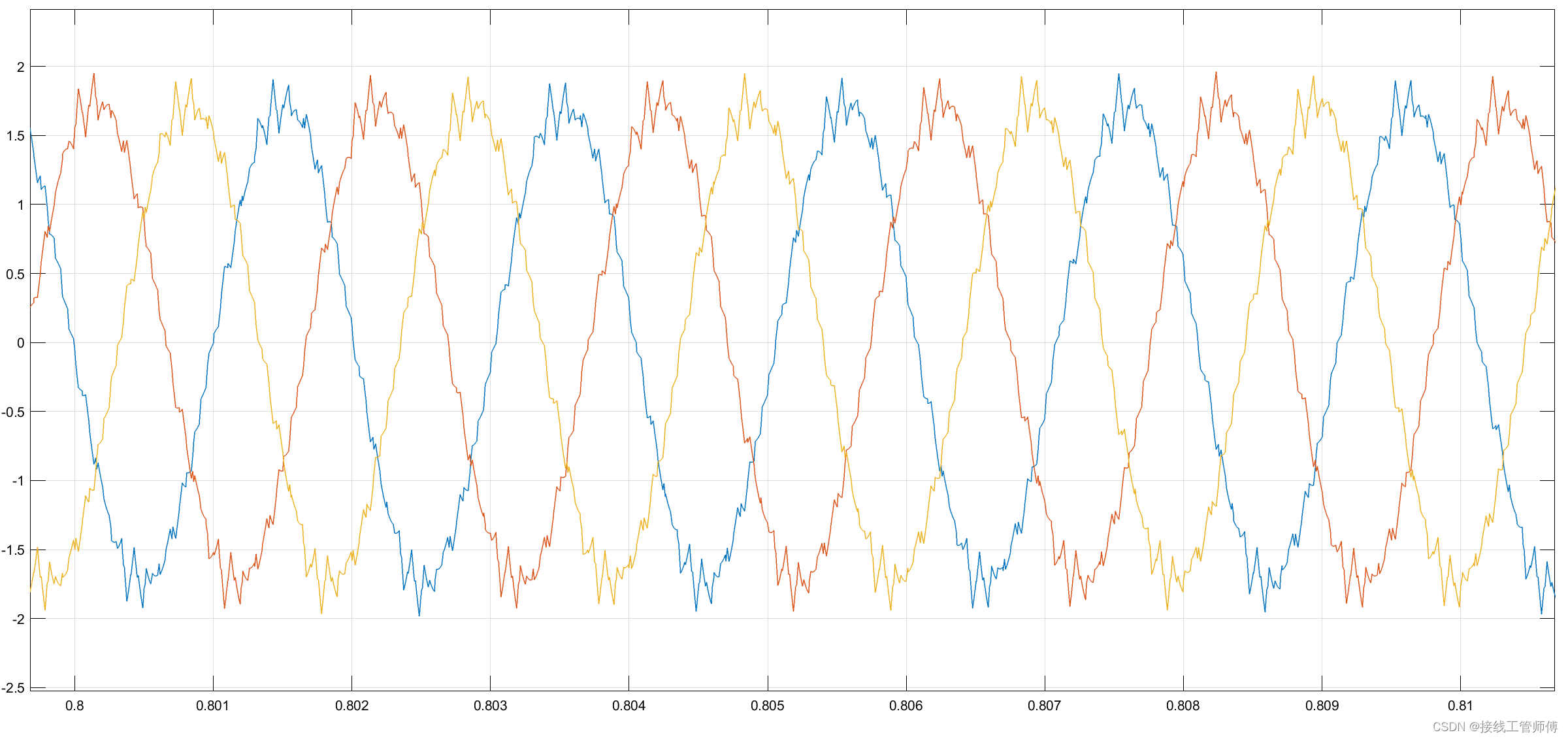
这是死区时间设定为1us的相电流波形
看起来区别不大又是稍微有那么一点优化,或许是仿真步长不够,具体死区补偿之后再说吧。
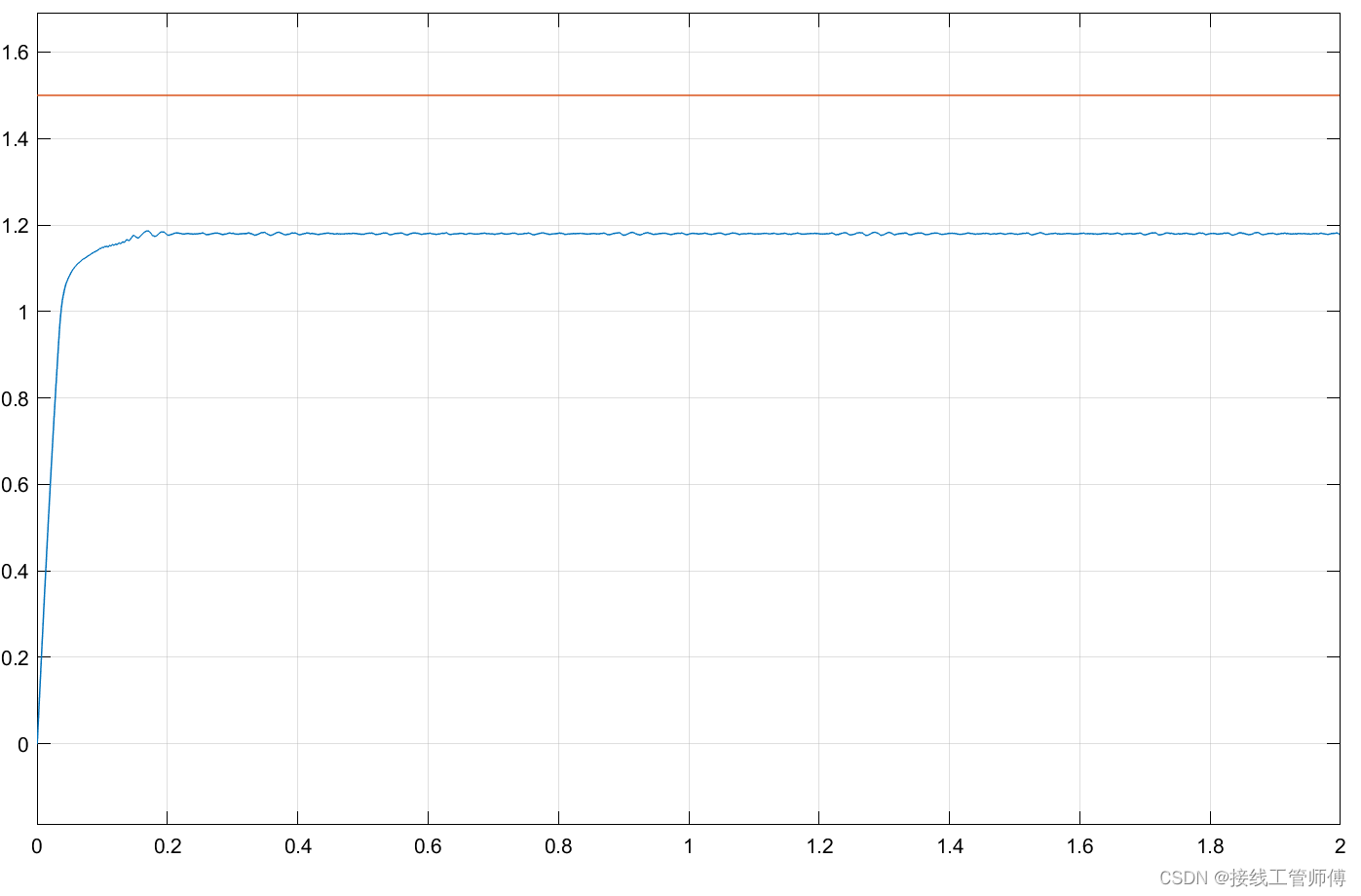
4、仿真结果
下图是没有加入弱磁算法的速度控制,给了1.5倍的额定转速,撑死了只能跑到不到1.2倍就不行了(加了0.1倍的额定负载)。
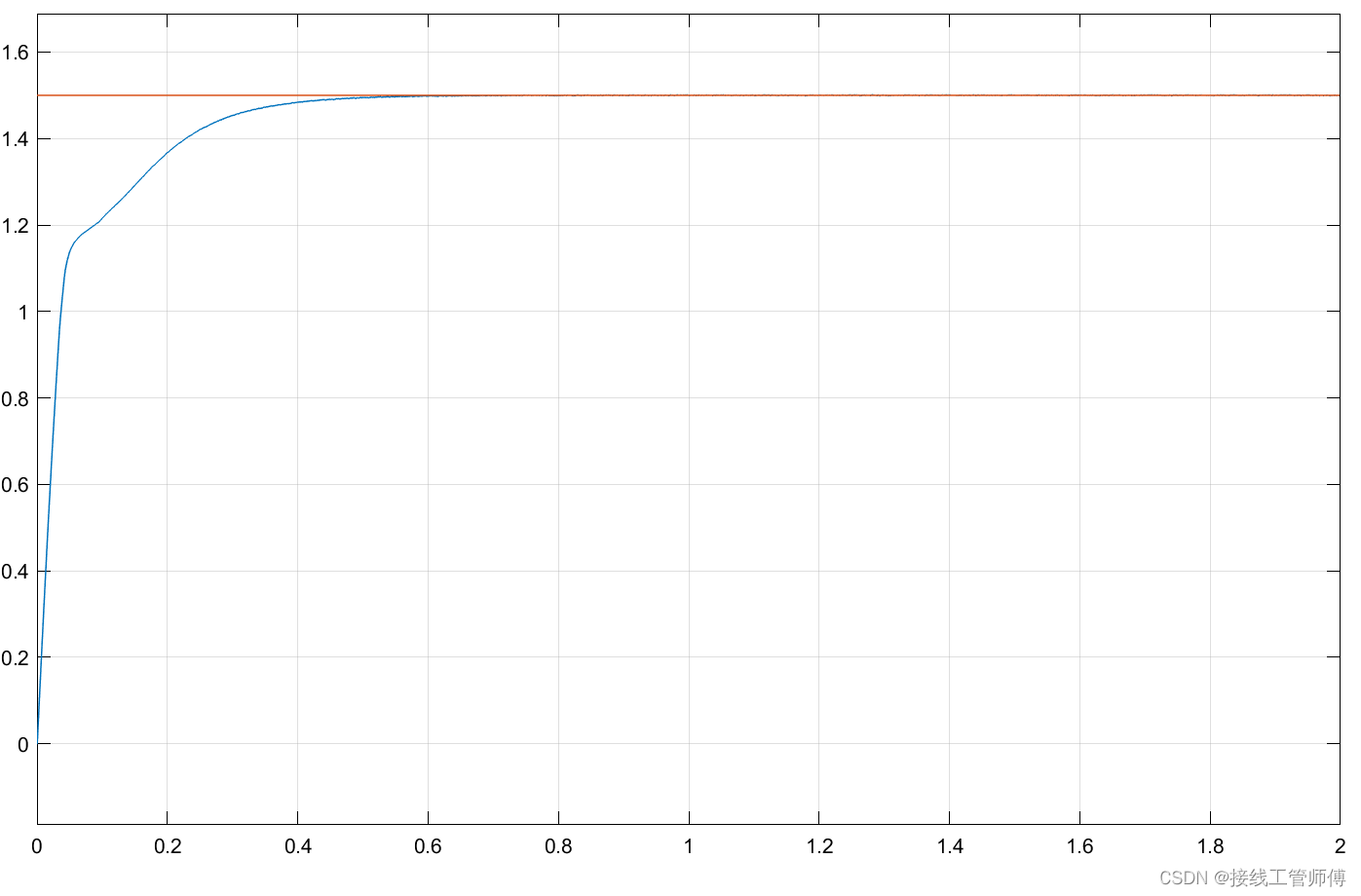
下图是弱磁算法后的,可以看到1.5倍额定转速完美达到。具体达到多少速度的看凸极率、LqLd等参数。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!