Pix2Pix-GAN 简介与代码实战
1.介绍
Pix2Pix出自于论文“Image-to-Image Translation with Conditional Adversarial Networks”,其中文翻译为:“基于条件gan的图片翻译”,说到翻译,我们很容易想到,英语转换成汉语就是一种语言上的翻译,同理,图片上内容的转换就是图片翻译(比如图片的风格转换)
2.模型结构
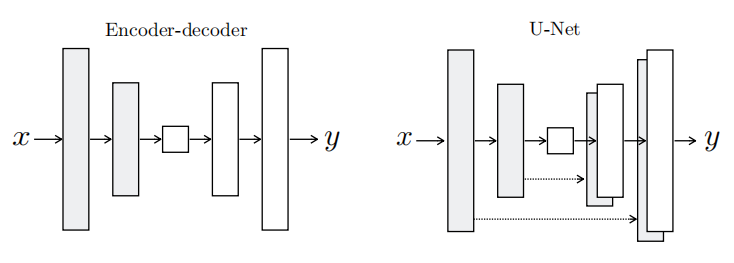
下图为生成器网络,左边为一个普通自编码器网络,右边为一个特殊的自编码器网络(U-Net),在自编码器网络中,编码端提取重要信息,解码端恢复这些信息,在对称的位置上,两者的信息是很相似的(如果能完全相同,图片就会无误差的被恢复),所以,如果我们能把解码端提取到的信息直接给解码端,那么恢复出来的图片是不是会更好?
对于判别器网络,普通的gan网络(可以参考我以前的博客),输入是一张图片,输出是一个二值数(0代表是生成图片,1代表是真实图片),而本论文的D称为Patch-D(名字很高大上,在代码中,实现起来很简单,让原本输出0和1的数字改成输出feature map),这样做的好处有两点:1.速度快,feature map的一个点相当于代表图片中的一个小区域,相当于把图片分区域判断(并行的感觉);2.对于全卷积的D,输入可以是任意大小图片。
3.模型特点
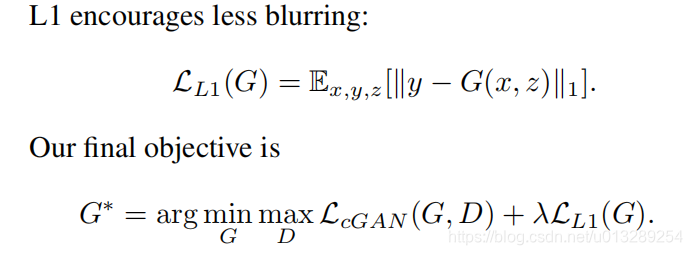
对于损失函数,注意两点就行:1.判别器输入的是两张图片一张是待被转换的图片(x),另外一张是目标图片或者生成的图片;2.增加L1损失函数,减少模糊(相当于L2),并让生成的图片更接近目标图片

4.代码实现keras
class Pix2Pix():def __init__(self):# Input shapeself.img_rows = 256self.img_cols = 256self.channels = 3self.img_shape = (self.img_rows, self.img_cols, self.channels)# Configure data loaderself.dataset_name = 'facades'self.data_loader = DataLoader(dataset_name=self.dataset_name,img_res=(self.img_rows, self.img_cols))# Calculate output shape of D (PatchGAN)patch = int(self.img_rows / 2**4)self.disc_patch = (patch, patch, 1)# Number of filters in the first layer of G and Dself.gf = 64self.df = 64optimizer = Adam(0.0002, 0.5)# Build and compile the discriminatorself.discriminator = self.build_discriminator()self.discriminator.compile(loss='mse',optimizer=optimizer,metrics=['accuracy'])#-------------------------# Construct Computational# Graph of Generator#-------------------------# Build the generatorself.generator = self.build_generator()# Input images and their conditioning imagesimg_A = Input(shape=self.img_shape)img_B = Input(shape=self.img_shape)# By conditioning on B generate a fake version of Afake_A = self.generator(img_B)# For the combined model we will only train the generatorself.discriminator.trainable = False# Discriminators determines validity of translated images / condition pairsvalid = self.discriminator([fake_A, img_B])self.combined = Model(inputs=[img_A, img_B], outputs=[valid, fake_A])self.combined.compile(loss=['mse', 'mae'],loss_weights=[1, 100],optimizer=optimizer)def build_generator(self):"""U-Net Generator"""def conv2d(layer_input, filters, f_size=4, bn=True):"""Layers used during downsampling"""d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)d = LeakyReLU(alpha=0.2)(d)if bn:d = BatchNormalization(momentum=0.8)(d)return ddef deconv2d(layer_input, skip_input, filters, f_size=4, dropout_rate=0):"""Layers used during upsampling"""u = UpSampling2D(size=2)(layer_input)u = Conv2D(filters, kernel_size=f_size, strides=1, padding='same', activation='relu')(u)if dropout_rate:u = Dropout(dropout_rate)(u)u = BatchNormalization(momentum=0.8)(u)u = Concatenate()([u, skip_input])return u# Image inputd0 = Input(shape=self.img_shape)# Downsamplingd1 = conv2d(d0, self.gf, bn=False)d2 = conv2d(d1, self.gf*2)d3 = conv2d(d2, self.gf*4)d4 = conv2d(d3, self.gf*8)d5 = conv2d(d4, self.gf*8)d6 = conv2d(d5, self.gf*8)d7 = conv2d(d6, self.gf*8)# Upsamplingu1 = deconv2d(d7, d6, self.gf*8)u2 = deconv2d(u1, d5, self.gf*8)u3 = deconv2d(u2, d4, self.gf*8)u4 = deconv2d(u3, d3, self.gf*4)u5 = deconv2d(u4, d2, self.gf*2)u6 = deconv2d(u5, d1, self.gf)u7 = UpSampling2D(size=2)(u6)output_img = Conv2D(self.channels, kernel_size=4, strides=1, padding='same', activation='tanh')(u7)return Model(d0, output_img)def build_discriminator(self):def d_layer(layer_input, filters, f_size=4, bn=True):"""Discriminator layer"""d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)d = LeakyReLU(alpha=0.2)(d)if bn:d = BatchNormalization(momentum=0.8)(d)return dimg_A = Input(shape=self.img_shape)img_B = Input(shape=self.img_shape)# Concatenate image and conditioning image by channels to produce inputcombined_imgs = Concatenate(axis=-1)([img_A, img_B])d1 = d_layer(combined_imgs, self.df, bn=False)d2 = d_layer(d1, self.df*2)d3 = d_layer(d2, self.df*4)d4 = d_layer(d3, self.df*8)validity = Conv2D(1, kernel_size=4, strides=1, padding='same')(d4)return Model([img_A, img_B], validity)def train(self, epochs, batch_size=1, sample_interval=50):start_time = datetime.datetime.now()# Adversarial loss ground truthsvalid = np.ones((batch_size,) + self.disc_patch)fake = np.zeros((batch_size,) + self.disc_patch)for epoch in range(epochs):for batch_i, (imgs_A, imgs_B) in enumerate(self.data_loader.load_batch(batch_size)):# ---------------------# Train Discriminator# ---------------------# Condition on B and generate a translated versionfake_A = self.generator.predict(imgs_B)# Train the discriminators (original images = real / generated = Fake)d_loss_real = self.discriminator.train_on_batch([imgs_A, imgs_B], valid)d_loss_fake = self.discriminator.train_on_batch([fake_A, imgs_B], fake)d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)# -----------------# Train Generator# -----------------# Train the generatorsg_loss = self.combined.train_on_batch([imgs_A, imgs_B], [valid, imgs_A])elapsed_time = datetime.datetime.now() - start_time# Plot the progressprint ("[Epoch %d/%d] [Batch %d/%d] [D loss: %f, acc: %3d%%] [G loss: %f] time: %s" % (epoch, epochs,batch_i, self.data_loader.n_batches,d_loss[0], 100*d_loss[1],g_loss[0],elapsed_time))# If at save interval => save generated image samplesif batch_i % sample_interval == 0:self.sample_images(epoch, batch_i)def sample_images(self, epoch, batch_i):os.makedirs('images/%s' % self.dataset_name, exist_ok=True)r, c = 3, 3imgs_A, imgs_B = self.data_loader.load_data(batch_size=3, is_testing=True)fake_A = self.generator.predict(imgs_B)gen_imgs = np.concatenate([imgs_B, fake_A, imgs_A])# Rescale images 0 - 1gen_imgs = 0.5 * gen_imgs + 0.5titles = ['Condition', 'Generated', 'Original']fig, axs = plt.subplots(r, c)cnt = 0for i in range(r):for j in range(c):axs[i,j].imshow(gen_imgs[cnt])axs[i, j].set_title(titles[i])axs[i,j].axis('off')cnt += 1fig.savefig("images/%s/%d_%d.png" % (self.dataset_name, epoch, batch_i))plt.close()
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!