walking机器人仿真教程-应用-多点导航结合音乐播放实现移动音箱
系列文章目录
- walking机器人仿真教程-启动仿真环境
- walking机器人仿真教程-查看仿真环境相关话题
- walking机器人仿真教程-仿真控制
- walking机器人仿真教程-激光建图-仿真slam_toolbox算法建图
- walking机器人仿真教程-激光建图-仿真gmapping算法建图
- walking机器人仿真教程-激光建图-仿真cartographer算法建图
- walking机器人仿真教程-使用统一建图入口
- walking机器人仿真教程-激光导航-仿真单点导航
- walking机器人仿真教程-激光导航-仿真多点导航
- walking机器人仿真教程-激光导航-仿真融合建图和导航
- walking机器人仿真教程-仿真行为树航点导航
- walking机器人仿真教程-仿真行为树中止回航
- walking机器人仿真教程-仿真行为树拍照
- walking机器人仿真教程-仿真行为树目标识别
- walking机器人仿真教程-设置行为树目标点
- walking机器人仿真教程-激光跟随
- walking机器人仿真教程-激光导航-TEB算法导航
- walking机器人仿真教程-应用-循线
- walking机器人仿真教程-应用-障碍检测
- walking机器人仿真教程-应用-控制走圆形
- walking机器人仿真教程-加载不同的gazebo世界
- walking机器人仿真教程-应用-发送路径进行导航实现田地作物检查
- walking机器人仿真教程-应用-单点导航实现小镇送货
- walking机器人仿真教程-应用-多点导航实现咖啡店内配送
- walking机器人仿真教程-应用-多点导航实现办公室内取件和配送
- walking机器人仿真教程-应用-利用Regulated Pure Pursuit插件实现导航
- walking机器人仿真教程-应用-单点目标点实现对象跟随
- walking机器人仿真教程-应用-设置限速区实现仓库里指定区域速度限制
- walking机器人仿真教程-应用-多点导航实现房间内巡逻检查
- walking机器人仿真教程-应用-设置禁区实现仓库内特别区域禁行
- walking机器人仿真教程-应用-指定车道导航
- walking机器人仿真教程-rosbag录制和播放
- walking机器人仿真教程-应用-使用直线路径规划器插件实现导航
- walking机器人仿真教程-应用-实时加载地图实现多楼层导航
- walking机器人仿真教程-应用-低电量自动导航到充电位置
- walking机器人仿真教程-应用-低电量实现自主对接充电
- walking机器人仿真教程-应用-使用ARTag固定位置实现自主对接
- walking机器人仿真教程-应用-自动查找ArUco Marker位置进行自主对接
说明:
- 介绍如何结合多点导航和音乐播放实现移动音箱
- 想法:在房间内实现多点导航,到达每个航点后会随机自动播放一首音乐,播放完之后继续下一个航点,直到所有航点结束.
- 实现原理:通过航点编辑器,保存带操作的航点文件,参考文章,再通过python3导航脚本读取航点文件,获取航点,进行导航,根据操作字段operate判断为PlayMusic,启动播放音乐.
步骤:
- 加载gazebo
. /usr/share/gazebo/setup.bash
- 启动仿真
ros2 launch walking_application house_world_inspection.launch.py
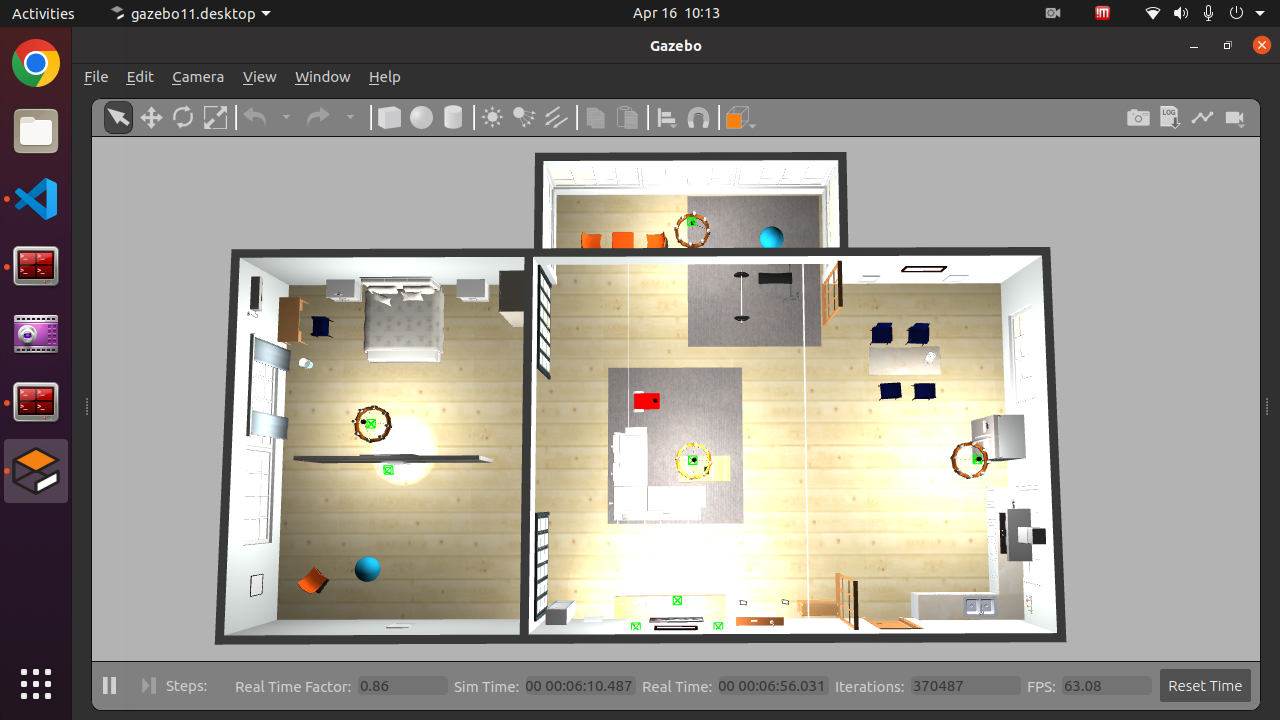
- gazebo效果:
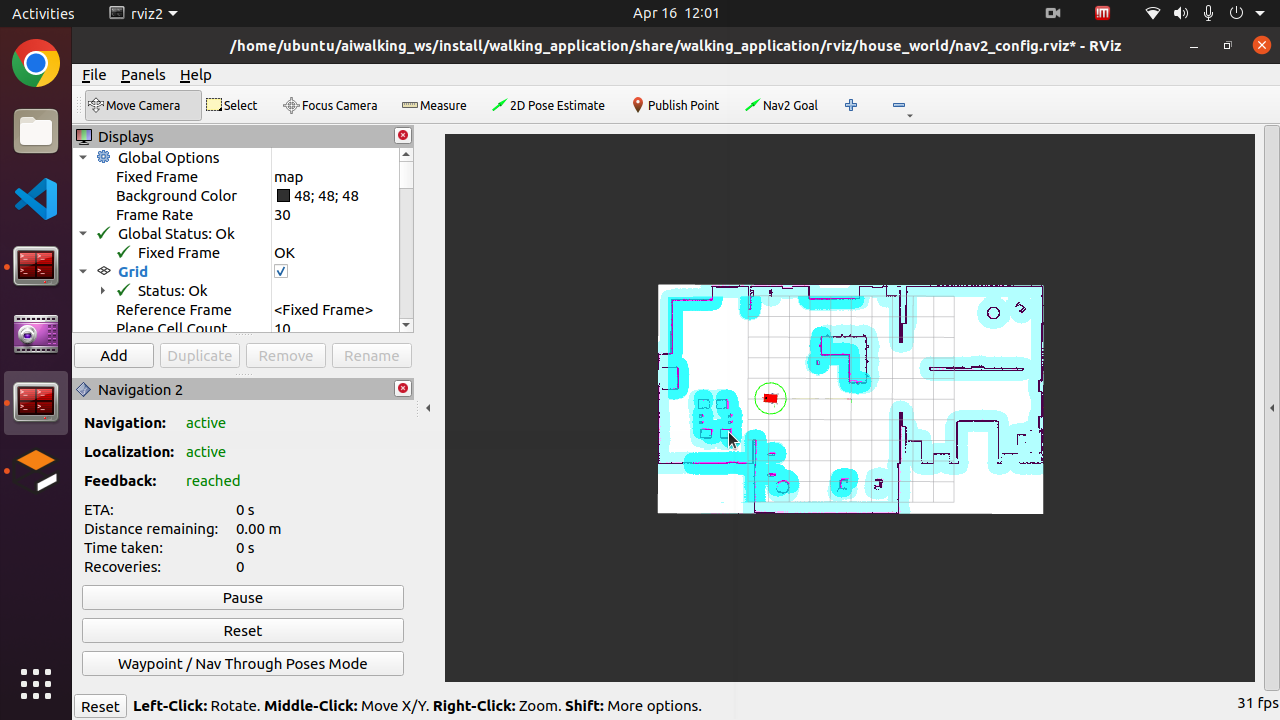
- rviz效果:
- 设计航点
- 利用walking_navigation多点导航面板(参考)和目标点设置工具walkingGoal(参考),设定航点并保存航点
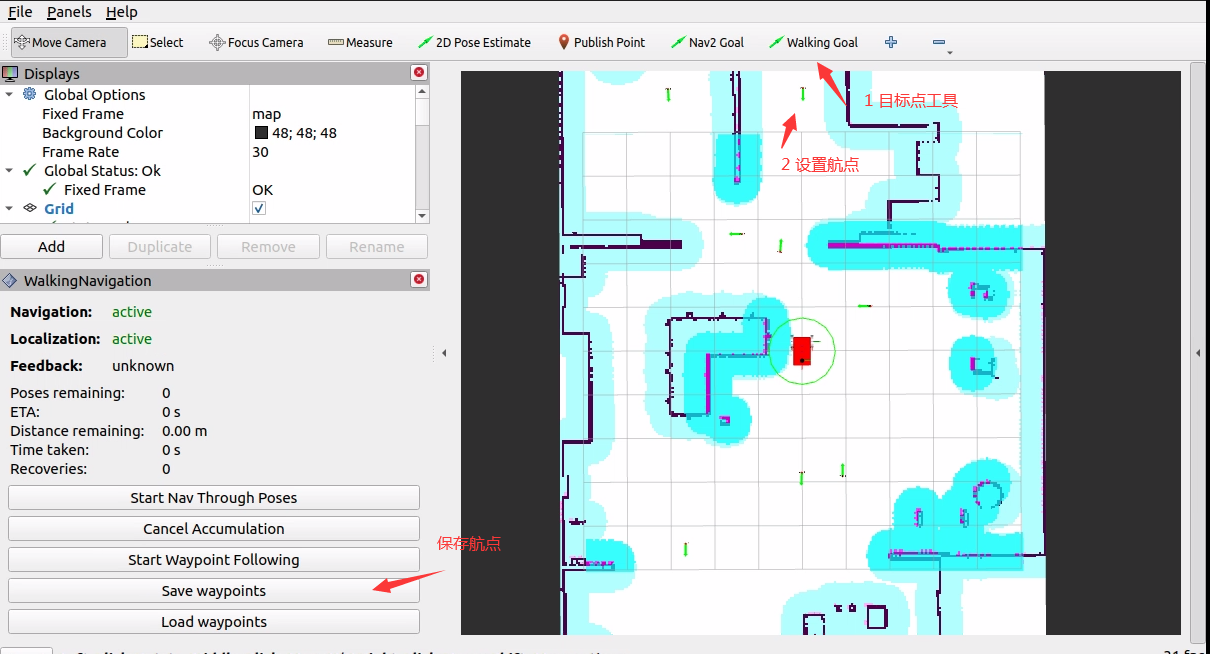
- 保存文件到目录并命名:
/home/ubuntu/waypoints/house_waypoints_music.json - 设置操作
- 再利用航点编辑工具(参考),设置航点操作为PlayMusic

- 编辑后保存文件到目录并命名为:
/home/ubuntu/waypoints/house_waypoints_music_ed.json - 启动导航
ros2 run walking_application run_inspection_v2.py
- 文件已经默认指定航点文件为
/home/ubuntu/waypoints/house_waypoints_music_ed.json - 执行效果:
$ ros2 run walking_application run_inspection_v2.py
pygame 2.1.2 (SDL 2.0.16, Python 3.8.10)
Hello from the pygame community. https://www.pygame.org/contribute.html
[INFO] [1653474888.057387605] [basic_navigator]: Publishing Initial Pose
[INFO] [1653474892.074457651] [basic_navigator]: Nav2 is ready for use!
[INFO] [1653474892.081163843] [basic_navigator]: Navigating to goal: 3.16139913 -0.13622037...
Executing current waypoint: 1
Executing current waypoint: 1
Executing current waypoint: 1
Inspection 1 is complete! Returning to start...
don't have any operate
[INFO] [1653474907.134787479] [basic_navigator]: Navigating to goal: 6.59372425 -2.59195447...
Executing current waypoint: 2
Executing current waypoint: 2
Executing current waypoint: 2
Executing current waypoint: 2
Inspection 2 is complete! Returning to start...
Begin to play music!
play music is done!
[INFO] [1653475227.017869471] [basic_navigator]: Navigating to goal: 1.17916834 0.49717629...
Executing current waypoint: 3
Executing current waypoint: 3
Executing current waypoint: 3
Executing current waypoint: 3
Executing current waypoint: 3
Executing current waypoint: 3
Executing current waypoint: 3
Inspection 3 is complete! Returning to start...
Begin to play music!
- 执行之后,自动在房间内导航,并到达一个航点之后,会播放音乐
- 使用的音乐目录位于/home/ubuntu/Music下.可以自己更换音乐文件
- 使用的航点文件位于/home/ubuntu/waypoints/house_waypoints_music_ed.json
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!