【bug集合】No tf data. Actual error: Fixed Frame [map] does not exist
问题描述
在运行rviz模块时,
rviz
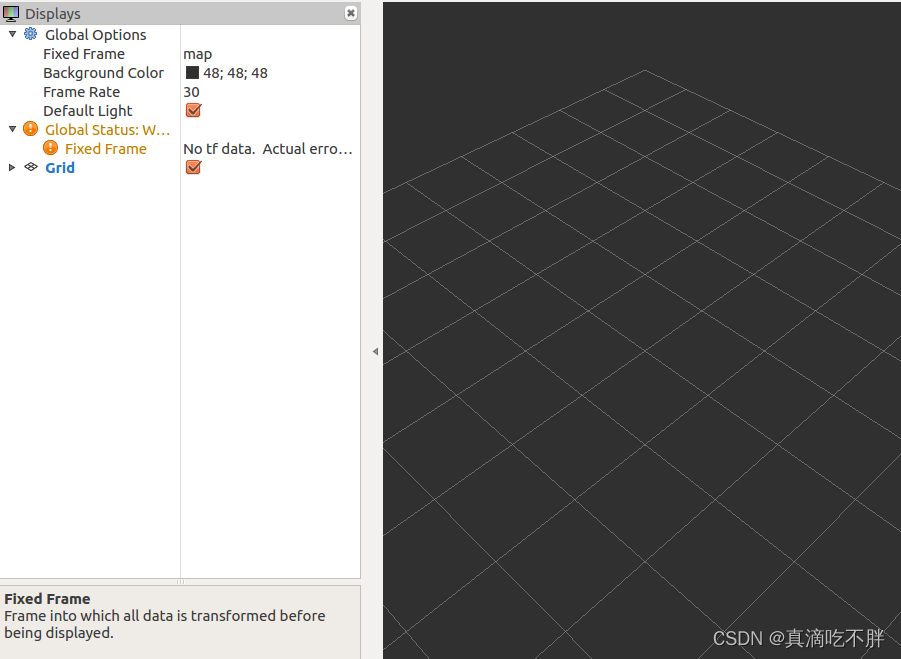
出现了警告
No tf data. Actual error: Fixed Frame [map] does not exist
这导致地图无法加载出来。其主要原因是tf树中没有world坐标系,解决方法就是让rviz知道world坐标系在哪。
解决办法
新建终端,运行如下命令
rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 map ××× 100
××× 可以用world、laser、map或my_frame尝试
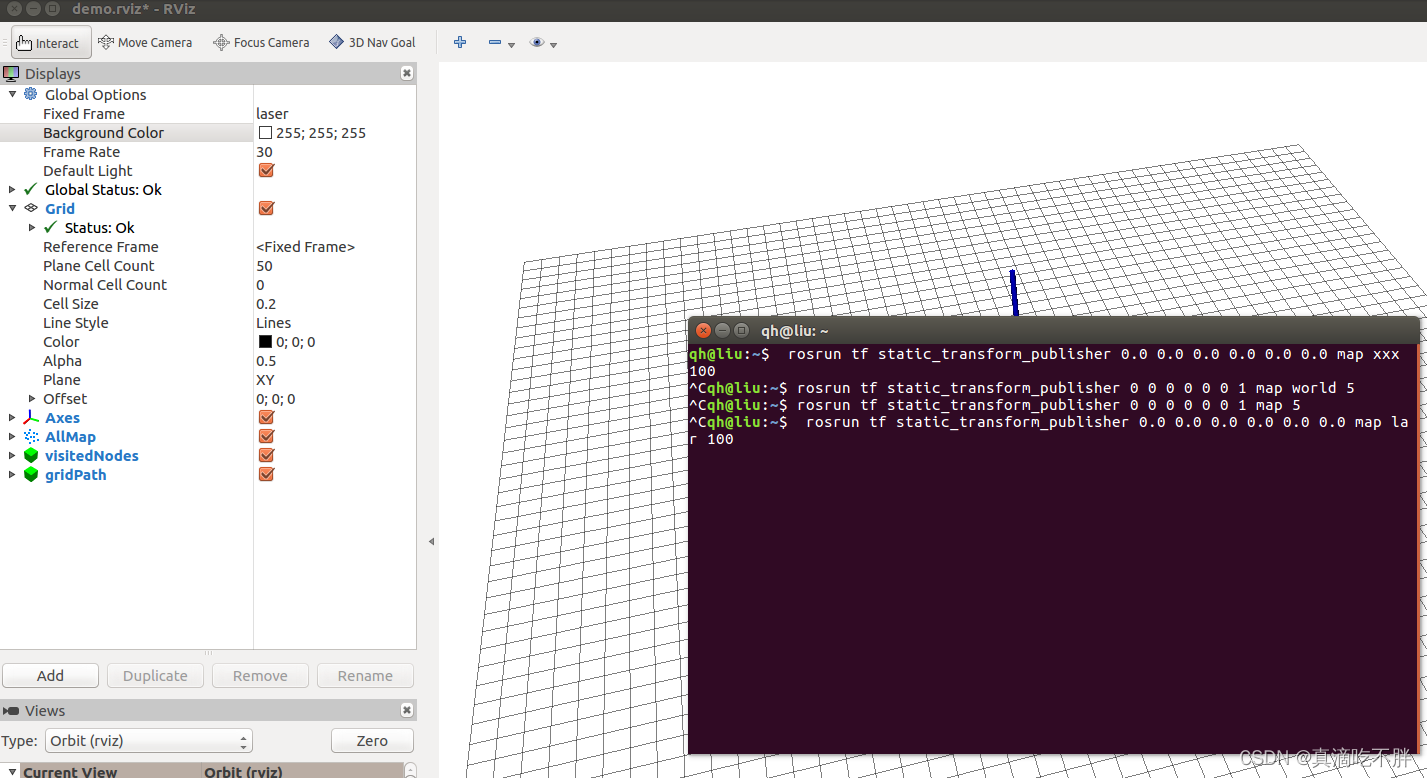
问题解决
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!