基于Frenet参照系的无人车路径规划算法
项目演示:无人车路径规划算法:基于Frenet参照系的无人车路径规划算法_哔哩哔哩_bilibili
本博客付·完整代码数据:
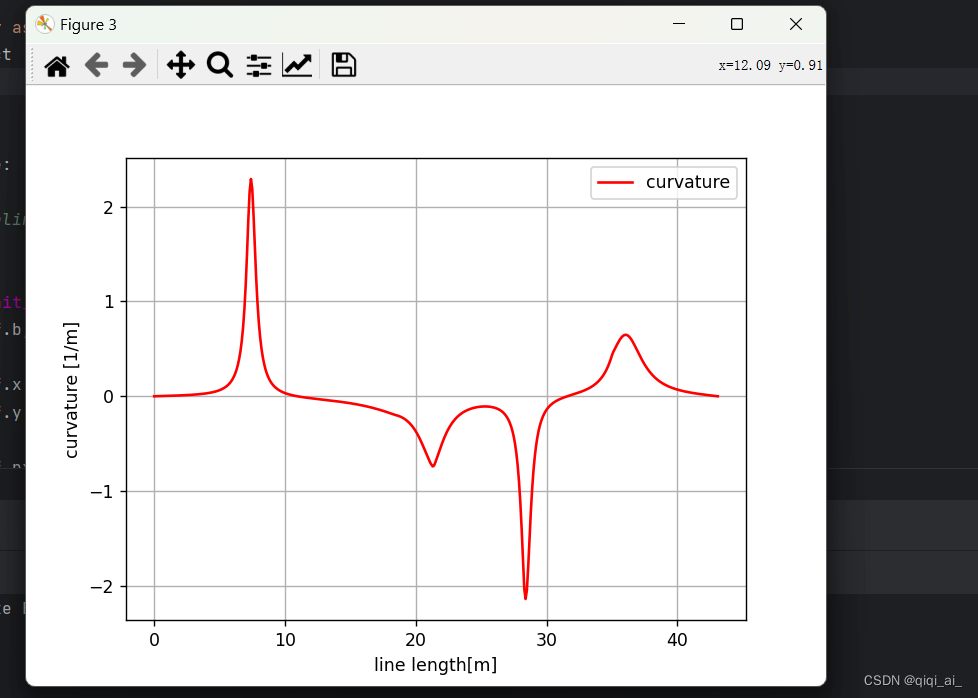
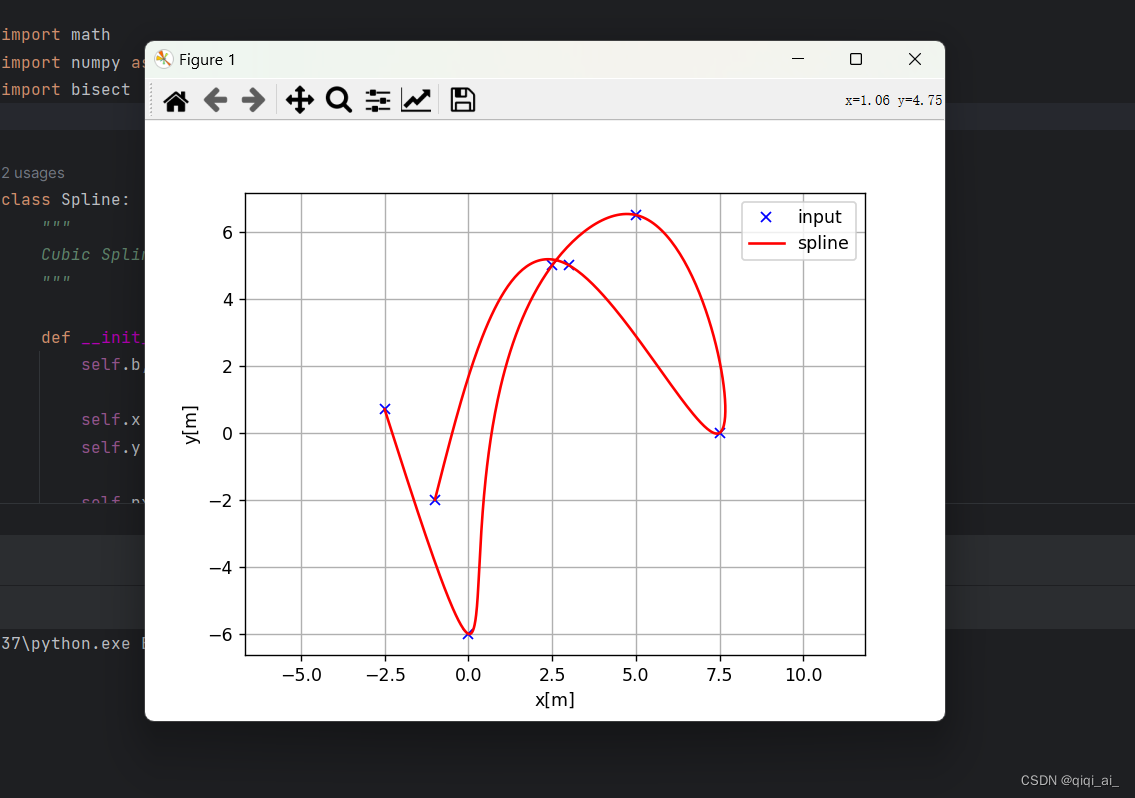
运行截图:
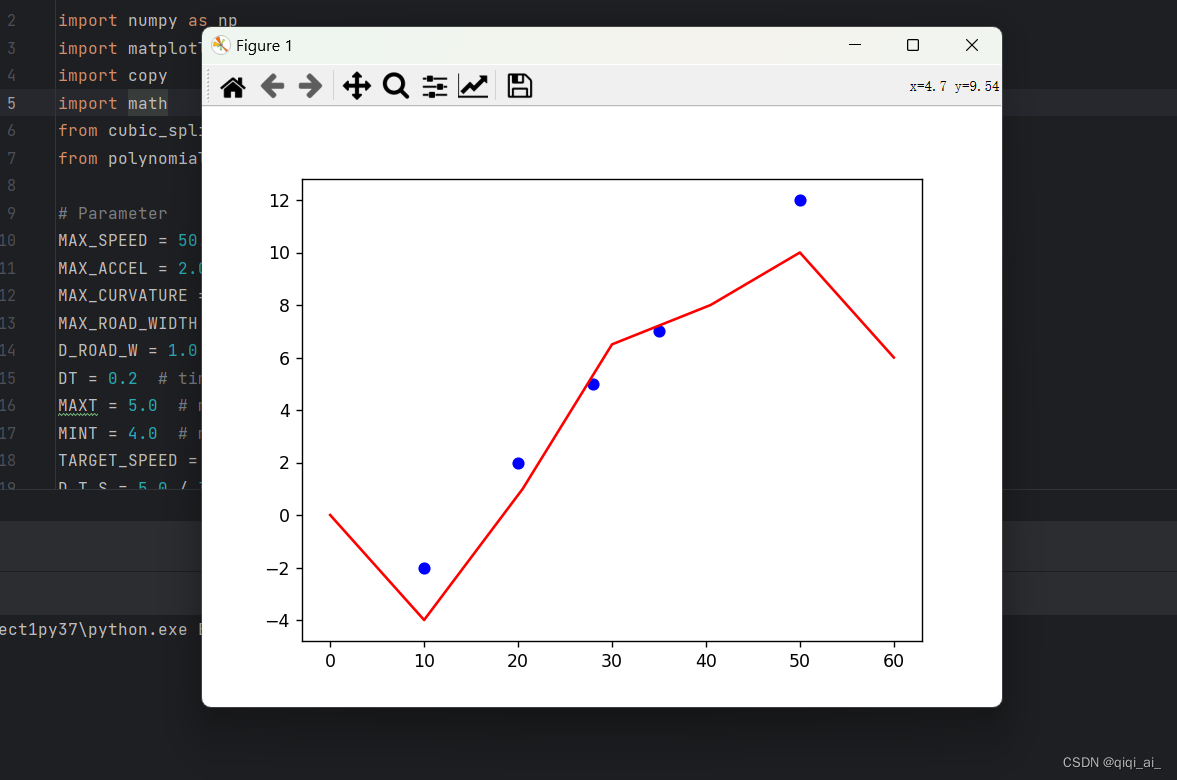
import numpy as np
import matplotlib.pyplot as plt
import copy
import math
from cubic_spline import Spline2D
from polynomials import QuarticPolynomial, QuinticPolynomial# Parameter
MAX_SPEED = 50.0 / 3.6 # maximum speed [m/s]
MAX_ACCEL = 2.0 # maximum acceleration [m/ss]
MAX_CURVATURE = 1.0 # maximum curvature [1/m]
MAX_ROAD_WIDTH = 7.0本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!