制动仿真台架系列-AKIII轮速板卡调试02
由于制动控制单元需要轮速的输入,所以我们需要轮速的仿真给到样件。目前我接触的轮速板卡有两种,一种是软实时,通过PXIE机箱给出CAN信号,控制轮速板卡发出轮速,延时大概在10ms左右,一种是硬实时,板卡可直接插在机箱中,发出轮速信号,此种延时在us级别。本文中主要针对第一种进行调试。
目前大不多厂家轮速采取的是AKIII 协议,编码格式为差分曼彻斯特,波形如下图实采所示
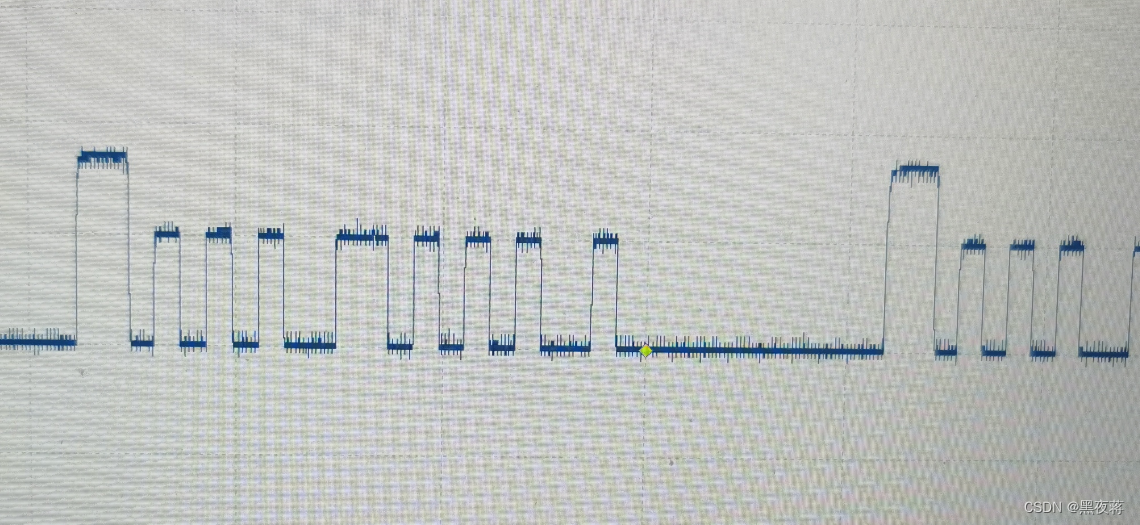
其中:高等级电流(I_CCH,HIGH-level supply current),一般取28mA,用于速度脉冲;
中等级电流(I_CCM,MID-level supply current),一般取14mA,用于数据协议位;
低等级电流(I_CCL,LOW-level supply current),一般取7mA,表示信号中的低电平
两个高电流之间的时差,配合齿数和轮毂半径,即可模拟出车速,因此轮速板卡中,需配置这两个参数(TOOTHNUM&RADIUS),一般可配置为48(个)和0.336(m)。
速度脉冲后面的中等级电流就是数据协议位,具体定义如下:
第0位:LR,场幅预留位,一般用来表示气隙(即轮速传感器和轮毂的距离的程度),需设置为0,为1是表示场幅太小,即报错
第1位:SLM, 轮速信号测量有效性, 需设置为有效,为1;
第2位:N/A, 无分配,为0;
第3位:GDR, 方向识别有效性, 需设置为有效,为1;
第4位:DR, 方向识别,0/1代表正反向,默认为0;
第5位:LM0, 气隙大小位,需设置为1,为0是气隙表示太小,即报错;
第6位:LM1, 气隙大小位, 需设置为1,为0是气隙表示太小,即报错;
第7位:LM2, 气隙大小位, 需设置为1,为0是气隙表示太小,即报错;
第8位:P, 奇偶性,默认为0;
以上配置完成后,即可通过CAN报文发送信息给轮速板卡,实现信号的发送,注意一般轮速板卡最好单独供电。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!