CNN-based Point Cloud De-Noising
CNN-based Lidar Point Cloud De-Noising in Adverse Weather

Key Knowledgeable:
- Autolabeling for Noise Caused by Rain or Fog
根据range image判断各个像素点的distance变化决定像素点是否是雨雾水珠产生的噪声进行数据的标注:

为什么可以这样标记噪声:
笔者的理解是雨雾噪声往往是空气中弥补的水珠产生的反射,在“Fog Simulation on Real LiDAR Point Clouds”一文中详细描述到,在水珠与摄像头距离处于某一个值的时候反射强度达到峰值,因此雨雾天摄像头旁往往会有圆形的噪声反射,所以当扫描车运动的时候,如果是非噪声的点距离摄像头的distance会变化,反之因为空气中水珠密布,总有以摄像头为圆心的水珠反射噪声,所以噪声的distance是不会变换多少的,因此判断点在每帧是否都移动了一个阈值就可以初步判断出是否为噪声。
当然是个人的想法,文中对该部分并没有过多描述,欢迎指正
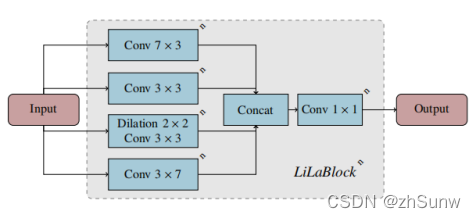
- Network Architecture
标注、增强的数据给WeatherNet用于语义分割进行去噪:

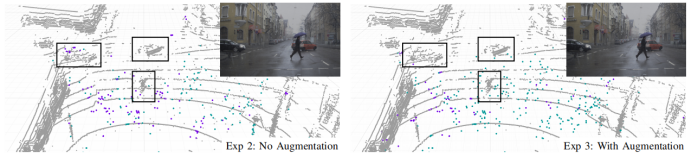
- Data Augmentation
模拟雨雾天气增强训练集数据: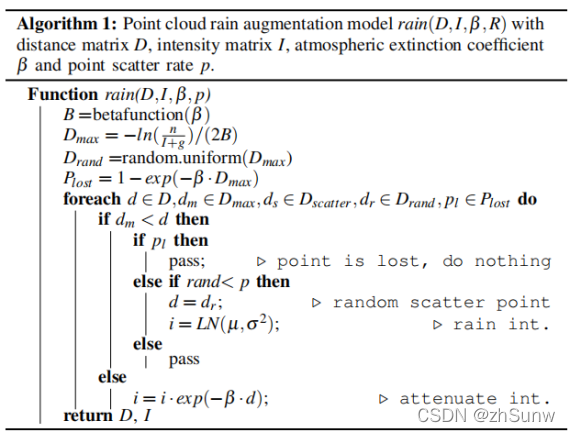
- Experiments
各个天气下去噪定量结果:
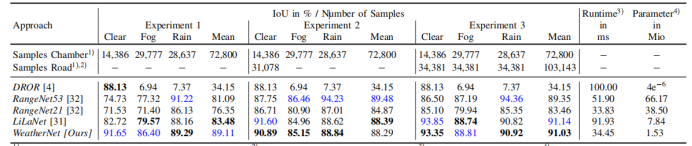
Experiment1、2、3分别表示三种训练集下的实验结果:
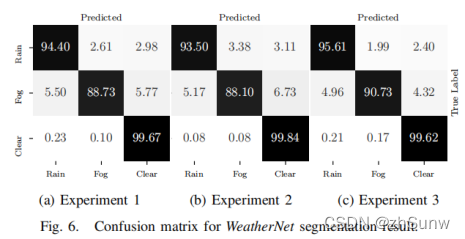
可视化定性结果: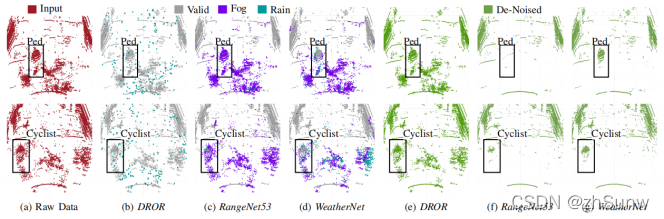
可以看到数据增强、WeatherNet都在去噪(雨雾的语义分割)work
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!