快速行进算法(Fast Marching)
快速行进算法(Fast Marching)
Fast Marching方法简介
快速行进算法 (Fast Marching Method) 是求解程函方程 (Eikonal Equation) F ∣ ∇ T ∣ = 1 F|\nabla T|=1 F∣∇T∣=1 的一种高效数值算法,程函方程属于非线性偏微分方程,可以认为是一种近似波动方程。在界面演化问题中的求解的结果 T T T 的物理含义是曲线以速度 F ( x ⃗ ) F(\vec x) F(x) 到达计算域每一点所需要消耗的最短时间。寻找 T T T 在不同高度上的水平集,它总能给出时间演化曲线的一个位置。当 F = 1 F = 1 F=1 时,方程解就代表计算域中的距离场,也就是所谓的符号距离函数。
快速行进算法使用了一个特殊的差商代替微商,比如在二维情况,使用的是如下近似:
∣ ∇ T ∣ 2 ≈ ( max { − Δ + x T , Δ − x T , 0 } ) 2 + ( max { − Δ + y T , Δ − y T , 0 } ) 2 |\nabla T{|^2} \approx {(\max \{ - {\Delta _{ + x}}T,{\Delta _{ - x}}T,0\} )^2} + {(\max \{ - {\Delta _{ + y}}T,{\Delta _{ - y}}T,0\} )^2} ∣∇T∣2≈(max{−Δ+xT,Δ−xT,0})2+(max{−Δ+yT,Δ−yT,0})2
这里的 Δ + x {\Delta _{ + x}} Δ+x 表示对于自变量 x x x 的一阶向前差分算子, Δ − x {\Delta _{ - x}} Δ−x 表示对于自变量 x x x 的一阶向后差分算子。
算法推导
同差分思想, F ∣ ∇ T ∣ = 1 F|\nabla T|=1 F∣∇T∣=1的一阶近似为:
∣ ∇ T ∣ 2 ≈ ( max { − Δ + x T , Δ − x T , 0 } ) 2 + ( max { − Δ + y T , Δ − y T , 0 } ) 2 |\nabla T{|^2} \approx {(\max \{ - {\Delta _{ + x}}T,{\Delta _{ - x}}T,0\} )^2} + {(\max \{ - {\Delta _{ + y}}T,{\Delta _{ - y}}T,0\} )^2} ∣∇T∣2≈(max{−Δ+xT,Δ−xT,0})2+(max{−Δ+yT,Δ−yT,0})2
假设 T 1 T_1 T1是 x x x方向值较小的一个邻居, T 2 T_2 T2是 y y y方向值较小的一个邻居, t t t是当前待求点的值,为了方便,假设网格步长为1(因为算法是基于网格的,若步长不是为1,最后的结果乘以网格步长h即可),那么有:
( max { t − T 1 , 0 } ) 2 + ( max { t − T 2 , 0 } ) 2 = 1 / F 2 {(\max \{ t-T_1,0\} )^2} + {(\max \{ t-T_2,0\} )^2}= 1/F^2 (max{t−T1,0})2+(max{t−T2,0})2=1/F2
我们现在所要做的,就是解这个方程,分几种情况来考虑(不妨假设 T 1 ≥ T 2 T_1 \ge T_2 T1≥T2):
- t > max { T 1 , T 2 } = T 1 t>\max\{T_1,T_2\}=T_1 t>max{T1,T2}=T1
求解 ( t − T 1 ) 2 + ( t − T 2 ) 2 = 1 / F 2 {( t-T_1)^2} + {( t-T_2)^2}= 1/F^2 (t−T1)2+(t−T2)2=1/F2,可得(若有实根):
t = T 1 + T 2 + 2 / F 2 − ( T 1 − T 2 ) 2 2 t = \frac{T_1+T_2 +\sqrt{2/F^2-(T_1-T_2)^2}}{2} t=2T1+T2+2/F2−(T1−T2)2
这里舍去了另外一个根是因为另外一个根不满足满足 t > max { T 1 , T 2 } t>\max\{T_1,T_2\} t>max{T1,T2}。 - T 1 ≥ t > T 2 T_1 \ge t > T_2 T1≥t>T2
求解 ( t − T 2 ) 2 = 1 / F 2 {( t-T_2)^2}= 1/F^2 (t−T2)2=1/F2,因F为正,可得:
t = T 2 + 1 / F t=T_2+1/F t=T2+1/F
在这样的两种条件下,我们忽略的一个东西,就是在第一种情况下,有可能判别式小于零,导致无解。另外忽略的一个东西就是有可能我们按上面的方式求出来的t不满足前面的关于 t t t的范围的条件假设。
也就说,第一个条件下,我们还得满足:
T 1 + T 2 + 2 / F 2 − ( T 1 − T 2 ) 2 2 > T 1 \frac{T_1+T_2 +\sqrt{2/F^2-(T_1-T_2)^2}}{2}>T_1 2T1+T2+2/F2−(T1−T2)2>T1
即 ∣ T 1 − T 2 ∣ < 1 / F |T_1-T_2|<1/F ∣T1−T2∣<1/F,显然,这个条件满足了,判别式自然已经大于零了。
在第二个条件下,我们还得满足: T 2 + 1 / F ≤ T 1 T_2+1/F \leq T_1 T2+1/F≤T1,即 ∣ T 1 − T 2 ∣ ≥ 1 / F |T_1-T_2| \ge 1/F ∣T1−T2∣≥1/F,刚好和前面一个条件相补。
综上,我们去掉开始时的那个“不妨假设”,我们可以得到如下描述:
-
∣ T 1 − T 2 ∣ < 1 / F |T_1-T_2|<1/F ∣T1−T2∣<1/F
t = T 1 + T 2 + 2 / F 2 − ( T 1 − T 2 ) 2 2 t = \frac{T_1+T_2 +\sqrt{2/F^2-(T_1-T_2)^2}}{2} t=2T1+T2+2/F2−(T1−T2)2 -
∣ T 1 − T 2 ∣ ≥ 1 / F |T_1-T_2|\ge1/F ∣T1−T2∣≥1/F
t = min { T 1 , T 2 } + 1 / F t=\min\{T_1,T_2\}+1/F t=min{T1,T2}+1/F
算法描述
这里给出二维情况下的算法描述:
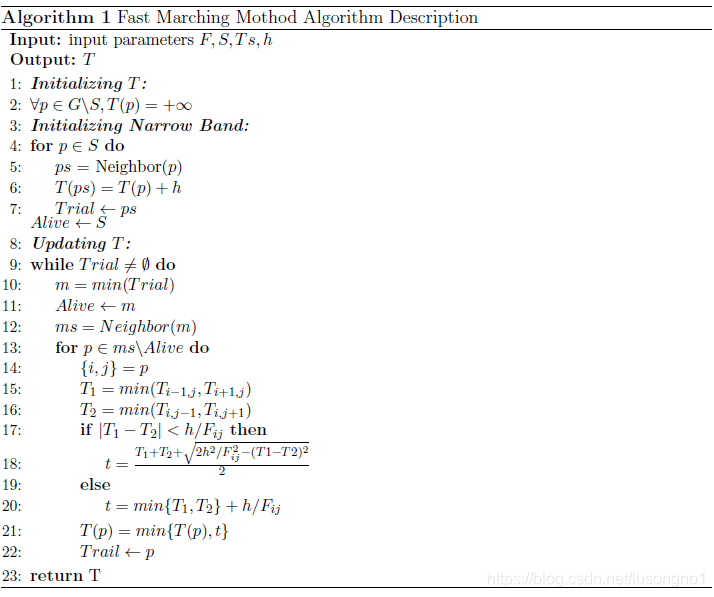
输入的 F F F 给出了速度场,在求符号距离函数中, F i j ≡ 1 F_{ij}\equiv 1 Fij≡1 。 S S S 为源点集,在求符号距离函数中,即为零水平离散点集。 T s T_s Ts 为源点集对应的函数值,在求符号距离函数中,这个值为零。 h h h 为离散空间步长。输出的 T T T 给出了时间标量场,当求符号距离函数时,它所求解得到的就是符号距离函数的离散表示。对于一个 N × N N\times N N×N 的网格, FMM 的总的算术复杂度为 O ( N log N ) {\rm O}(N\text{log}N) O(NlogN) ,误差阶为 O ( Δ x ) {\rm O}(\Delta x) O(Δx) 。
快速行进算法和 Dijkstra 算法思想相似,不同之处在于 Dijkstra 算法利用节点之间的欧式距离进行更新,而 FMM 算法利用由程函方程化简得到的近似偏微分方程进行更新。快速行进算法有很多特质:首先,它是“一次通过”的算法,减少了不必要的计算;其次,它计算量小,一般只要计算不超过 N log N N\text{log}N NlogN 次。
在水平集方法中,无符号距离函数的精度是至关重要的。因此,人们针对符号距离函数的重构和初始化提出了很多方法、算法和离散方式。
程序代码
提供一个自用的程序代码如下:
function T = fast_marching(source_set,source_values,bounds,h)
%bounds = [Ns Ns]. Ns表示一共有几个点. 点的下标从1开始.
%如若[0,1]N等分,那么Ns = N+1
dimention = size(source_set,2);
grid_num = zeros();
for i = 1:dimentiongrid_num(i) = bounds(i);
end
%算全局坐标,算矩阵的时候,网格要统一往上挪一格。
source_set_size = size(source_set,1);%源点的个数
if bound_exceed_judging(source_set,bounds)error('source_set out of bounds!');
end %源点不能超出那个区域,超出报错T = ones(grid_num)*inf; %网格点上值都标为无穷
points_attribution_status = 2*ones(grid_num); %网格上点的状态都先标为2
%2表示far,1表示trial,0表示alive
F = ones(grid_num);%特殊考虑
source_set_ind = mysub2ind(grid_num,source_set);%源点位置转全局索引
%对于矩阵取二维下标操作是不可行的,所以要转为全局坐标
T(source_set_ind) = source_values;%让这些格点上的T值都为给定的原始值
points_attribution_status(source_set_ind) = 0;%%让这些源点上的状态值都为0for k=1:source_set_sizecurrent_source = source_set(k,:);current_source_neighbors = neighbors_seeking(current_source);current_source_neighbors_ind = mysub2ind (grid_num,current_source_neighbors);%把当前点周围点的全局坐标都找出来for temp = current_source_neighbors_ind'if points_attribution_status(temp) ~= 0points_attribution_status(temp) = 1;%判断是否alive,不是alive置为1T(temp) = h./F(temp) + source_values(k);%当前点周围点的T值初始化.endendenditer = 0;
while 1iter = iter + 1;narrow_band_ind = find(points_attribution_status == 1);%标出窄带元素if isempty(narrow_band_ind)break;end%如果窄带空了,不再继续[~,band_min_T_position] = min(T(narrow_band_ind));%找到窄带中第一个T最小值的在窄带中的位置band_min_T_ind = narrow_band_ind(band_min_T_position);%找到窄带中最小T值全局坐标points_attribution_status(band_min_T_ind) = 0;%送到alive中去%对激活元素周围点的T值进行更新,并加入到窄带中band_min_T = myind2sub(grid_num,band_min_T_ind);%最小T值(坐标形式)%找出最小T值的邻居,alive邻居就不需要找了band_min_T_neighbors = neighbors_seeking(band_min_T);band_min_T_neighbors_ind = mysub2ind(grid_num,band_min_T_neighbors);updateT_neighbors_position = points_attribution_status...(band_min_T_neighbors_ind) ~= 0;updateT_neighbors_ind = band_min_T_neighbors_ind(updateT_neighbors_position);points_attribution_status(updateT_neighbors_ind) = 1;updateT_neighbors = myind2sub(grid_num , updateT_neighbors_ind);updateT_neighbors_num = size (updateT_neighbors,1);%要更新T值的元素个数的个数for t = 1:updateT_neighbors_numcurrent_updateT_neighbor = updateT_neighbors(t,:);F_current=F(mysub2ind(grid_num,current_updateT_neighbor));neighbor_matrix =...[-1 0 0;1 0 0;0 -1 0;0 1 0;0 0 -1;0 0 1];for jx = 1:dimentionneighbor_neighbors_aug(:,jx) = current_updateT_neighbor(jx) ...+ neighbor_matrix(:,jx);bound_exceed_position = find(neighbor_neighbors_aug(:,jx) >...bounds(jx) | neighbor_neighbors_aug(:,jx) < 1) ;neighbor_neighbors_aug(bound_exceed_position ,jx) =...2*current_updateT_neighbor(jx) - ...neighbor_neighbors_aug(bound_exceed_position ,jx);endneighbor_neighbors = neighbor_neighbors_aug(1:2*dimension,:);neighbor_neighbors_ind = mysub2ind(grid_num,neighbor_neighbors);neighbor_neighbors_T = T(neighbor_neighbors_ind);Tn = zeros();for u = 1:dimensionTn(u) = min(neighbor_neighbors_T(2*u-1:2*u));endTn = sort(Tn);T_update = Tn(1) + h/F_current;ups = 2;while ups <= dimension && T_update > Tn(ups)T_update = (sum(Tn)+sqrt(sum(Tn)^2 +...ups*h^2/F_current^2-ups*(Tn*Tn')))/ups;ups = ups + 1;end% band_min_T% myind2sub([9,9],updateT_neighbors_ind(t))%%%%%%%%%%%%%%%%%%%%%%%addT(updateT_neighbors_ind(t)) = min...(T(updateT_neighbors_ind(t)),T_update);%%%%%%%%%%%%%%%%%%%%%%%%%%endendfunction flag = bound_exceed_judging(point_set,bounds)
dimention = size(point_set,2);
flag = zeros(size(point_set,1),1);
for ix = 1:size(point_set,1)for j = 1 :dimentionif max(point_set(ix,j) > bounds(j)) || min(point_set(ix,j) < 1)flag (ix) = 1;break;endend
end
end
%越界判断函数,只要到边界上都判定为越界function [neighbors,neighbors_num]= neighbors_seeking(point)
dimention = size(point,2);
neighbor_matrix =...[-1 0 0;1 0 0;0 -1 0;0 1 0;0 0 -1;0 0 1];
%neighbors_aug = zeros();
for a = 1:dimentionneighbors_aug(:,a)= neighbor_matrix(:,a) + point(a);
end
neighbors(1:dimention*2,1:dimention) = neighbors_aug(1:dimention*2,1:dimention);
neighbors = neighbors(bound_exceed_judging(neighbors,bounds) == 0,:);
%超出边界的邻居都不算是邻居。
neighbors_num = size(neighbors,1);
endfunction ndx = mysub2ind(siz,point_set)
dimension = size(point_set,2);
switch dimensioncase 1ndx = point_set;%源点位置转全局索引case 2ndx = sub2ind(siz,point_set(:,1),point_set(:,2));%源点位置转全局索引case 3ndx = sub2ind(siz,point_set(:,1),point_set(:,2),point_set(:,3));otherwiseerror('wrong dimension for sub2ind input!');
end
endfunction band_min_T = myind2sub(siz,ndx)
dimension = length(siz);
switch dimensioncase 1band_min_T = ind2sub(siz,ndx);case 2[band_min_T(:,1),band_min_T(:,2)] = ind2sub(siz,ndx);case 3[band_min_T(:,1),band_min_T(:,2),band_min_T(:,3)] = ind2sub(siz,ndx);otherwiseerror('wrong dimension for ind2sub output!')
end
endend本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!