港科大fast-planner-ros-noetic-Ubuntu20.04项目跑码
by Rechard Lu
港科大项目跑码
GitHub - HKUST-Aerial-Robotics/Fast-Planner: A Robust and Efficient Trajectory Planner for Quadrotors
1、运行配置:(ROS 20.04 neotic)
安装NLOPT :直接在终端 输入 :sudo apt-get install libnlopt.dev
注意:作者将版本号改为“noetic”运行下图第一行时,“无法定位软件包”,故放弃了下面的方法
`sudo apt-get install libarmadillo-dev ros-melodic-nlopt`
而使用这个参考网站:
非线性优化库--NLopt_我才睡醒的博客-CSDN博客_非线性优化库
2、创建新工作空间及功能包
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
参考:
1.3.1 HelloWorld实现简介
3、下载源代码
打开终端ctrl+Ali+T
cd ${YOUR_WORKSPACE_PATH}/srcgit clone cd ../catkin_make
然后等待完成即可
如其中出现问题可自行查询
4、运行测试(有报错)
在你的工作空间内打开终端
输入:
source devel/setup.bash && roslaunch plan_manage rviz.launch
新建终端输入:
source devel/setup.bash && roslaunch plan_manage kino_replan.launch
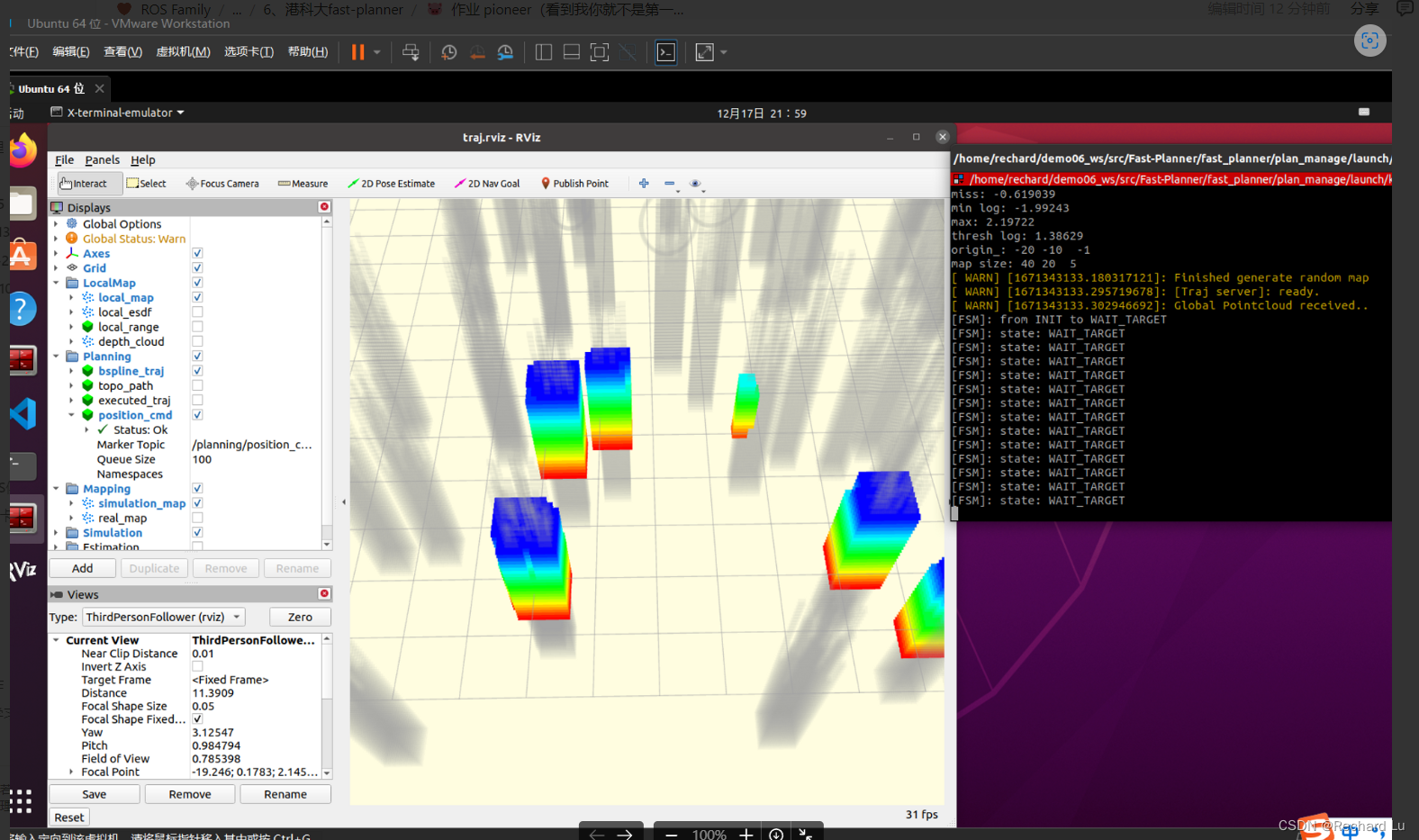
美美报错
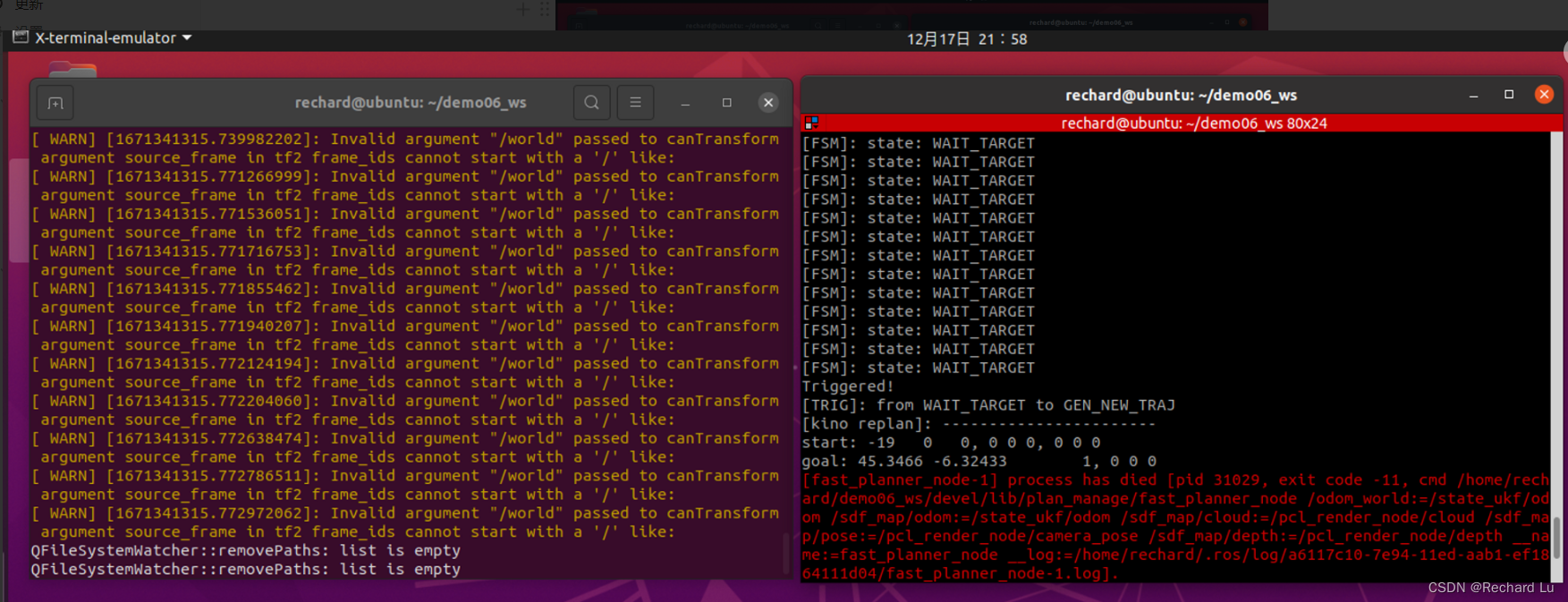
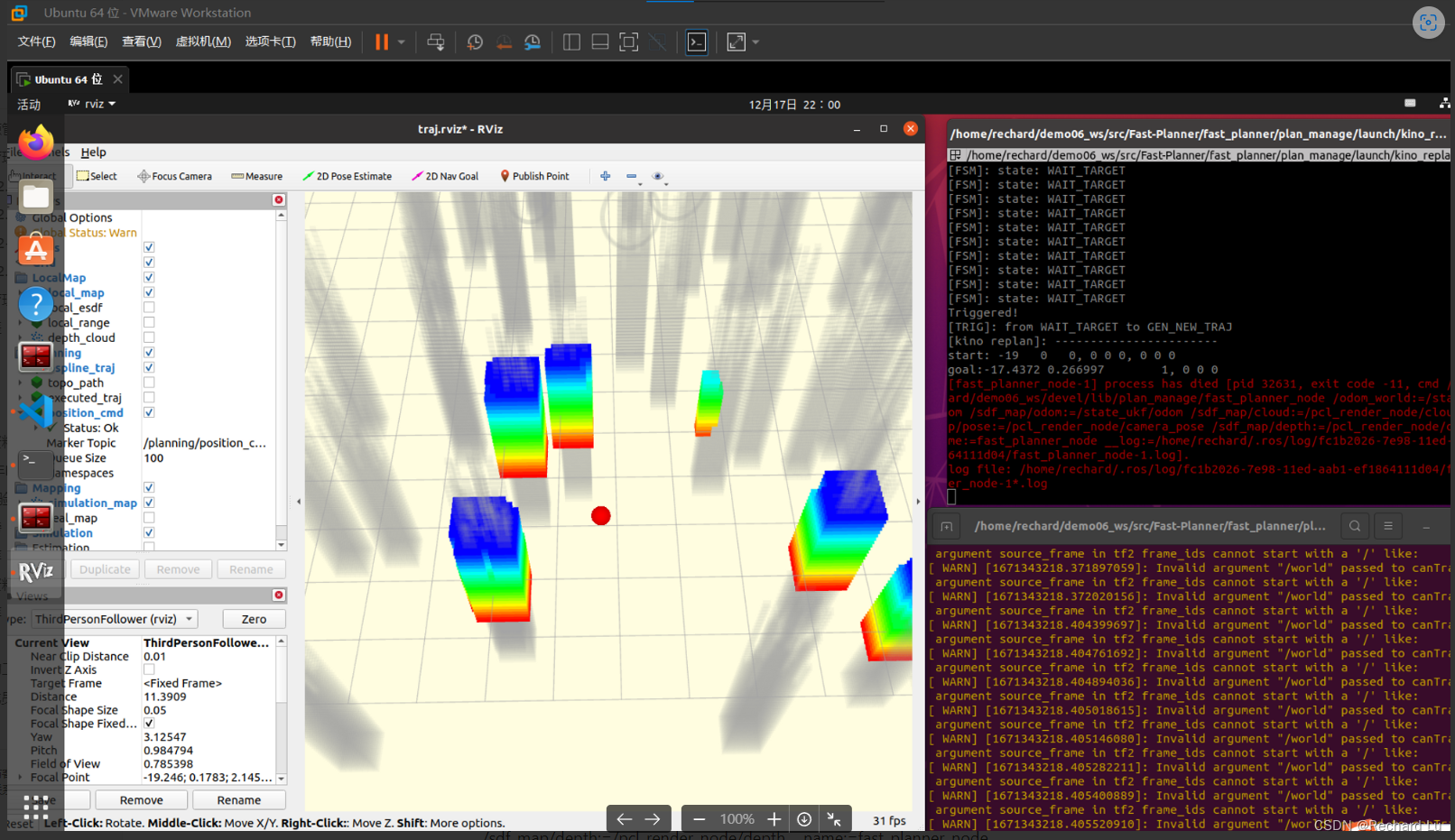
这是加了一个2D Nav Goal之后的报错
报错源码:
(1)[fast_planner_node-1] process has died [pid 32631, exit code -11, cmd /home/rechard/demo06_ws/devel/lib/plan_manage/fast_planner_node /odom_world:=/state_ukf/odom /sdf_map/odom:=/state_ukf/odom /sdf_map/cloud:=/pcl_render_node/cloud /sdf_map/pose:=/pcl_render_node/camera_pose /sdf_map/depth:=/pcl_render_node/depth __name:=fast_planner_node __log:=/home/rechard/.ros/log/fc1b2026-7e98-11ed-aab1-ef1864111d04/fast_planner_node-1.log]. log file: /home/rechard/.ros/log/fc1b2026-7e98-11ed-aab1-ef1864111d04/fast_planner_node-1*.log
(2)[ WARN] [1671343677.055999480]: Invalid argument "/world" passed to canTransform argument source_frame in tf2 frame_ids cannot start with a '/' like:#(错误提示貌似是world前加了”/”,但是我不太会更改源码qwq)
找了一个类似错误不知是不是
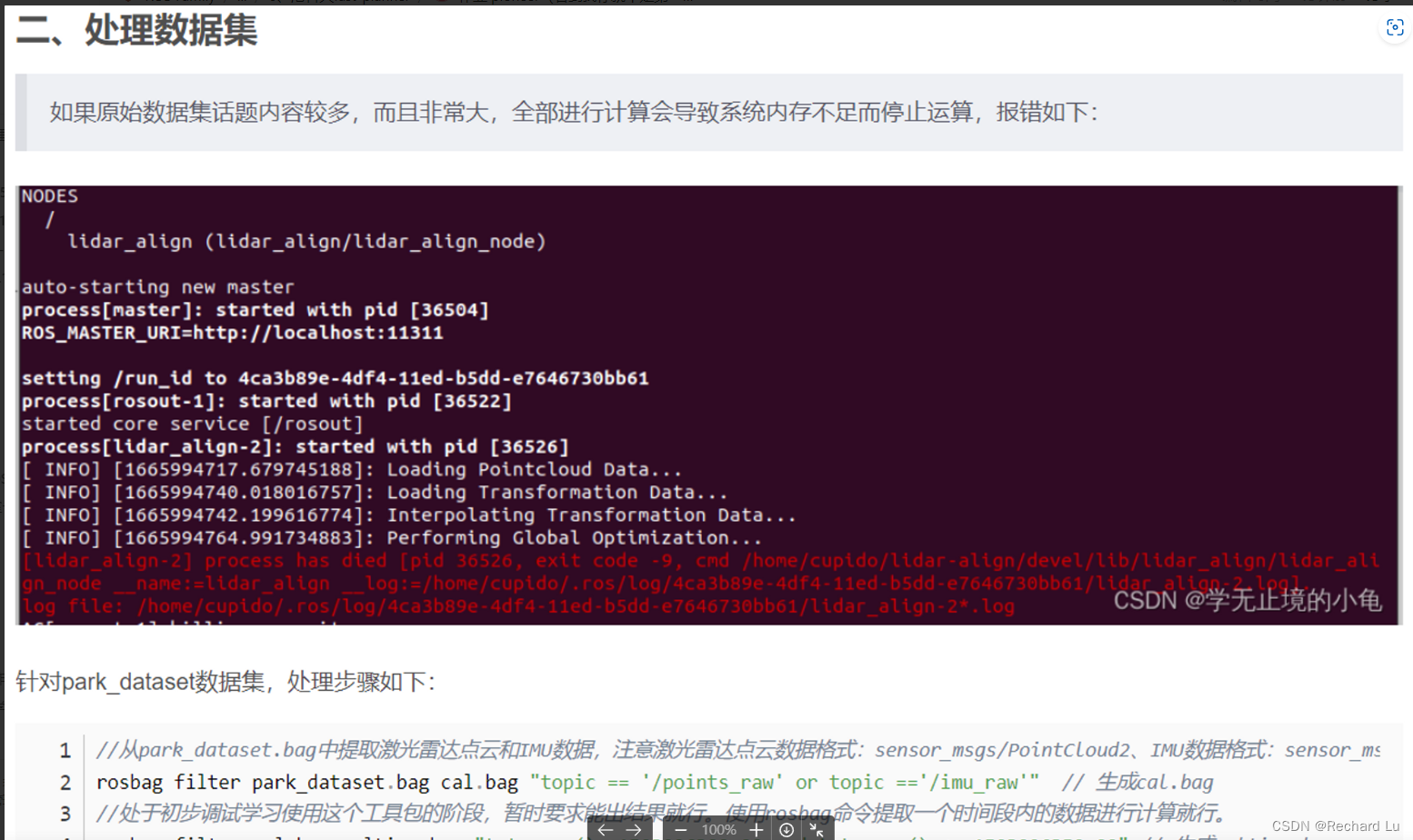
参考:
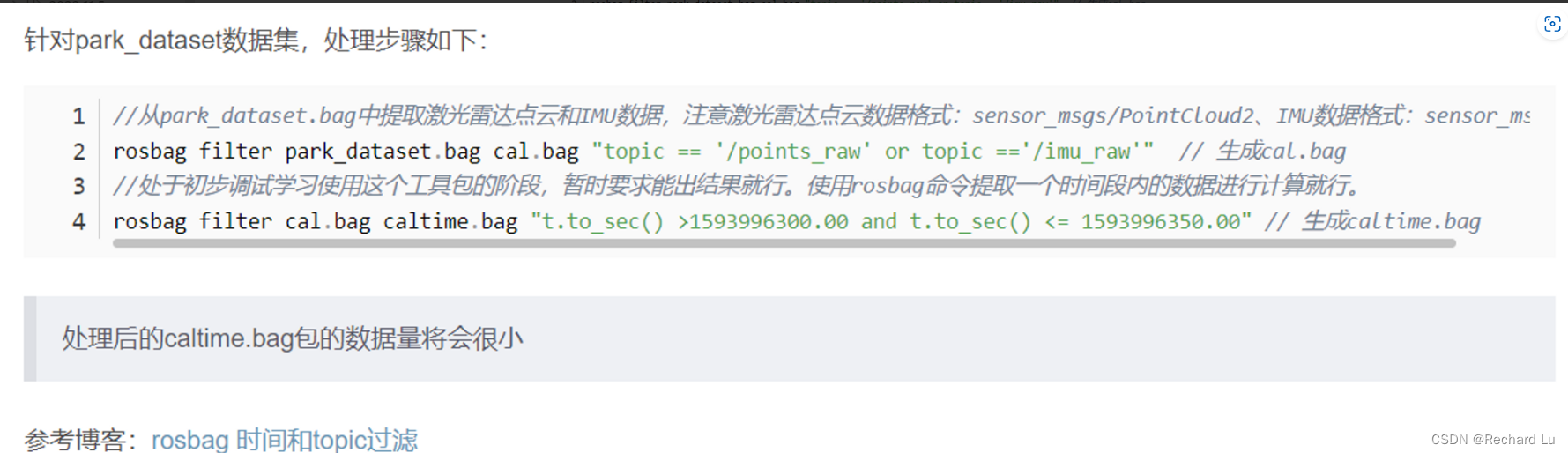
Ubuntu20.04安装和编译运行lidar_align来联合标定lidar与imu的外参_学无止境的小龟的博客-CSDN博客_ubuntu20.04安装lidar--align
大佬看见了可以随时@我
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!