Self-Organizing Cooperative Pursuit Strategy for Multi-USVwith Dynamic Obstacle Ships文章总结速度方向合并
具有动态障碍船舶的多USV自组织协同追踪策略
在船舶避碰规则研究领域,目前合理的处理方法是根据COLREGs设计策略。 参考。 [37] 报
告说,56% 的海上碰撞涉及违反 COLREGs。 因此,USV的避碰策略设计必须始终严格遵守
COLREGs。 一些研究将 COLREGs 合理地应用于无人艇的避碰技术。 Benjamin [38] 在基
于行为的控制框架中应用区间规划来表示安全导航的导航规则,最终完成了无人艇的安全避
碰。 谭等人。 [39] 提出了一种确定性路径规划算法,可以根据 COLREGs 计算实际的导
航路径,以确保 USV 的安全航行。 上述文章主要讨论单船动态避碰的避碰策略或研究
路径规划的避碰或保持轨迹跟踪的操作行为。
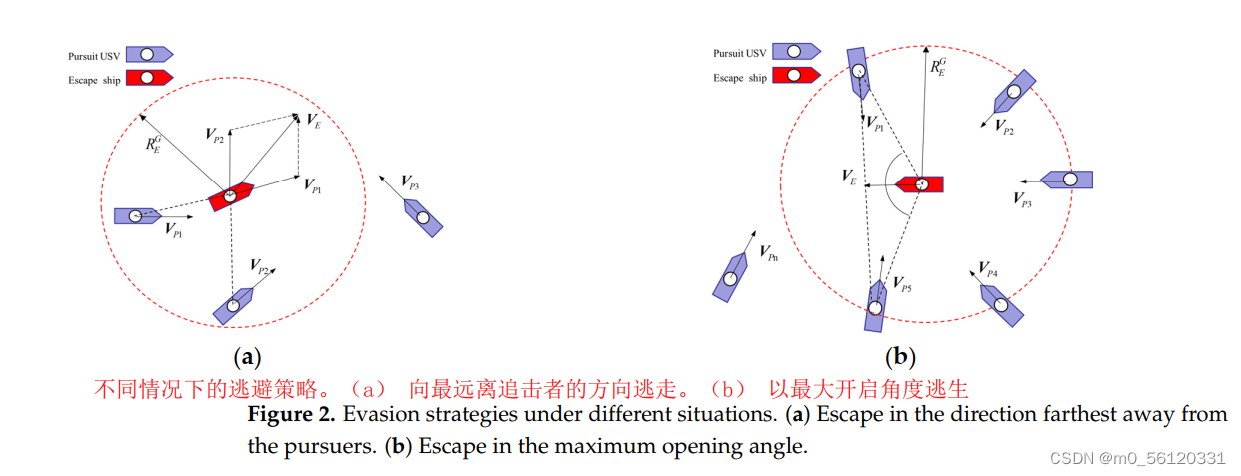
针对动态障碍船的情况,提出了一种基于自组织群控制的追击策略。 为了更好地保障无人艇群的航行安全,提出了动态防撞(DCA)策略,
以更灵活的编队形式提出了一种基于自组
织群控的追击策略。 2. 为了更好地保障
USV集群的航行安全,提出了动态避碰(DCA)
策略,结合COLREGs,建立了基于多规则的
避碰策略,以更好地适应追逃问题 在实际
情况下。 这种避障算法提高了所提出的追
踪算法的适用性。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!