埃夫特ER3B-C60型号的机器人拆装
1 埃夫特ER3B-C60机器人拆装前准备工作
1.1 的结构认知
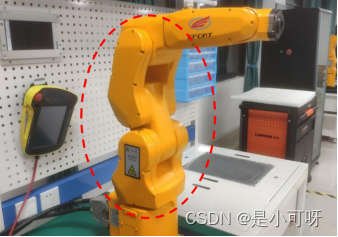
埃夫特ER3B-C60,一款紧凑型6轴机器人,额定负荷3kg,最大臂展593mm,主要应用于装配、物料搬运等,由本体、示教器、控制柜、控制系统组成。

图1.1 埃夫特ER3B-C60本体

图1.2 埃夫特ER3B-C60示教器

图1.3 埃夫特ER3B-C60控制柜
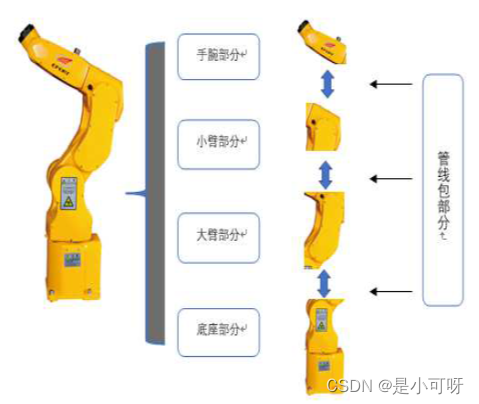
图1.4 埃夫特ER3B-C60结构划分
1.2 轴运动
| 轴类型 | 轴名称 | 轴运动方式 | 作用 |
| 主轴(基本轴) | 一轴 | 本体回旋 | 连接机器人底部的部位,主要承载机器人二至六轴部分并对其进行左右旋转,在电机和减速机的传动配合下,代替着一轴的运动方式 |
| 二轴 | 大臂运动 | 控制着机器人整个大臂的前后摆动功能、整个主臂的上下运动功能 | |
| 三轴 | 小臂运动 | 同样控制着机器人的前后摆动功能,只是比第二轴的摆臂范围小。 | |
| 次轴(手腕部运动) | 四轴 | 手腕旋转运动 | 控制机器人上面的圆形管部分可自由旋转的部位,活动范围类似于人的手臂,不过是360°旋转,里面有电线,跟人小臂的旋转范围相同 |
| 五轴 | 手腕上下运动 | 控制和微调机械臂上下翻转的动作,通常是当产品抓取后进行产品翻转的动作,可360度旋转 | |
| 六轴 | 手腕圆周运动 | 末端法兰盘部位,起到末端夹具部分旋转功能,可360度旋转 |
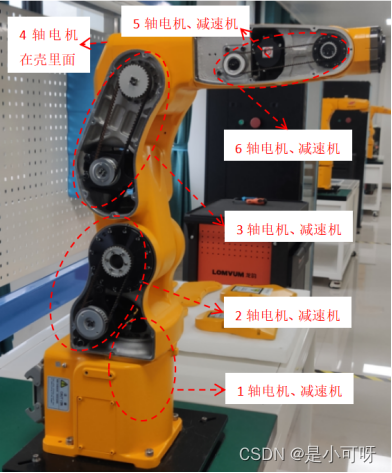
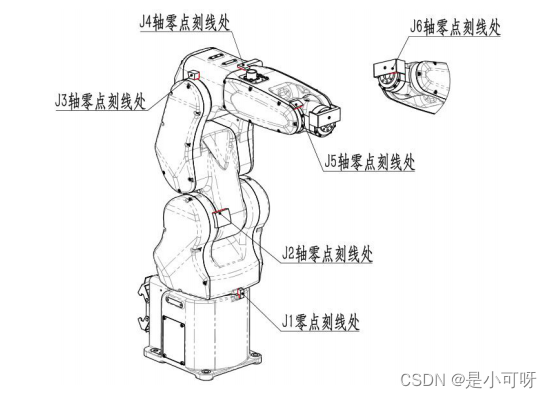

图1.5 埃夫特ER3B-C60各轴、绕线分布
1.3 启动登录调零
(1)插入总电源,打开电气控制柜,向上拨动闭合设备电源开关使电源开关由OFF扭转到ON
(2)确认进入示教器的登录页面,输入登录密码
(工程师密码为:666666 ,管理员密码为:999999)点击登录按键,完成账号登录。
(3)调零:
1. 使用示教器进入零位(点)标定界面,及任务栏中的快捷按键【监控】下的【驱动器】,该页面显示机器人各个关节零点标定状况。已完成标定的关节,显示为绿色,否则为红色。
2. 如需进行轴清零与编码器重置,输入密码1975,选定一个或多个关节,先点击【轴编码器重置】,再点击【轴清零】,记录当前编码器数据作为零点数据。
3. 当所有关节的零点数据都完成标定后,点击【设置】下的【系统】或点击菜单下的【系统】,重启控制器。
(注意:零点文件记录的是机器人出厂时标准的零点位置,若没有记录零点文件,零点恢复功能将不可用)
1.4 拆装准备工具
机器人本体、内六角扳手、斜口钳等工具

图1.6 埃夫特ER3B-C60拆装工具
2 机器人手腕和小臂部分的拆装
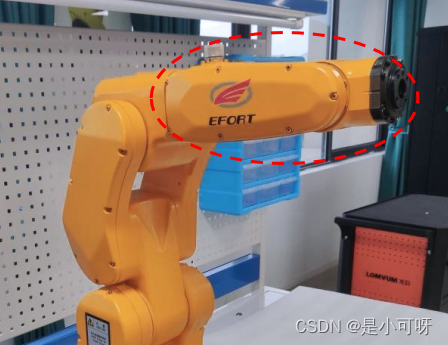
图2.1 埃夫特ER3B-C60手腕和小臂部分
2.1手腕
手腕部分主要由5轴电机、5轴减速机、6轴电机、6轴减速机、手腕连接体、手腕体1、手腕体2以及盖板等其它零件组成。
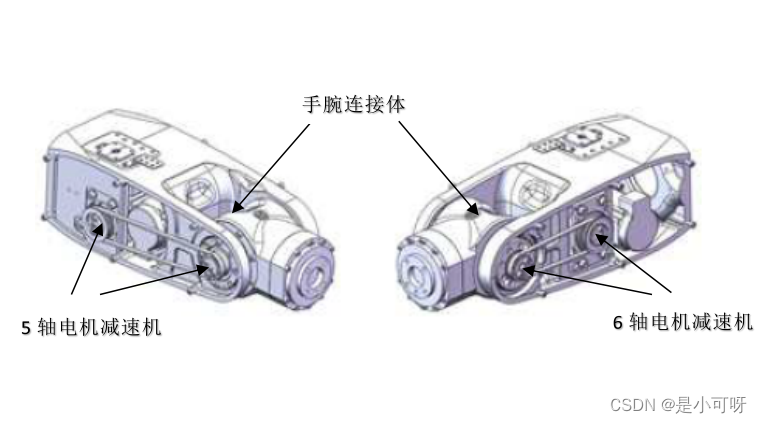
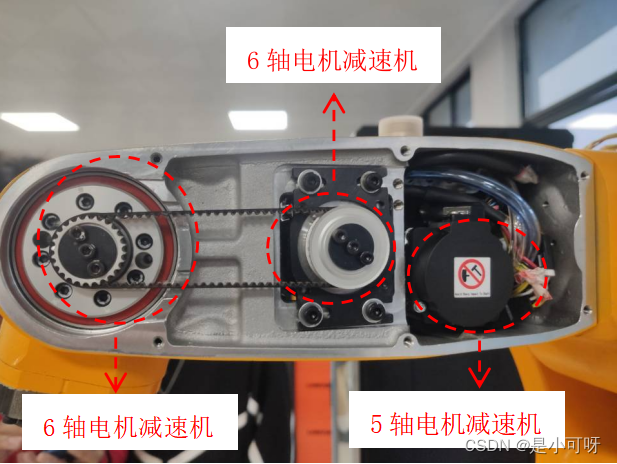
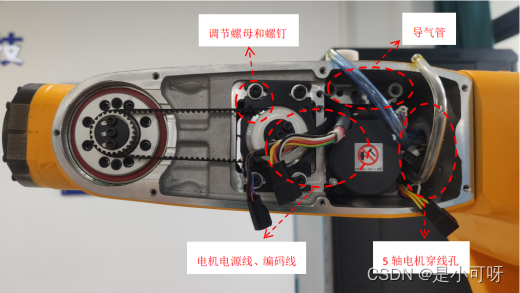
图2.2 埃夫特ER3B-C60手腕部分
2.2小臂
小臂部分主要由4轴电机减速机、电机座、J4轴电机过渡板以及盖板等其它零件组成
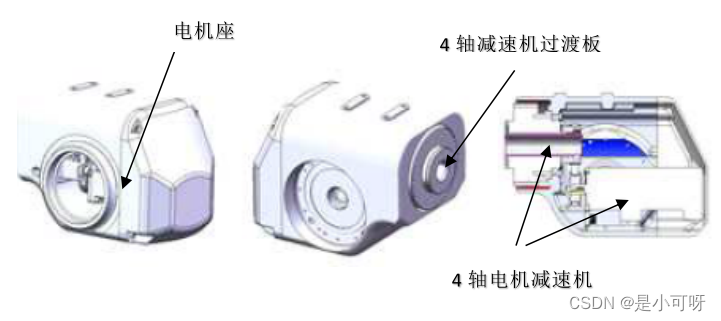
图2.3 埃夫特ER3B-C60手臂部分
2.3 拆卸步骤
(1)手腕外围两侧小盖板拆卸(左右各7处螺钉)
(2)拆卸5轴同步带、电机电源线、电机编码线
(3)5轴、6轴电机拆卸

(2)拆卸电机罩、4轴电机拆卸

图2.4 埃夫特ER3B-C604轴电机拆卸
(3)手腕和小臂-大臂拆卸分离
(4)4轴减速器和5轴电机拆卸
(5)6轴电机和5轴减速器波发生器拆卸
(6)5和6轴减速器拆卸

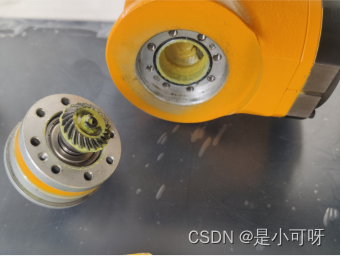
(7)6轴输出轴的拆卸
2.4 安装步骤
(1)6轴输出轴的安装
(2)5和6轴减速器安装
(3)6轴电机和5轴减速器波发生器安装
(4)4轴减速器和5轴电机安装
(5)手腕和小臂-大臂安装连接
(6)4轴电机安装
(7)手腕外围盖板安装
3 机器人大臂和底座部分的拆装
3.1 机器人大臂
3.2 3轴拆装步骤
(1)用手取出小臂-大臂处过线套,将固定管线的轧带用斜口钳剪断,并使用M4力矩扳手拆卸钣金件M4螺丝2个,分离3轴电机接头。


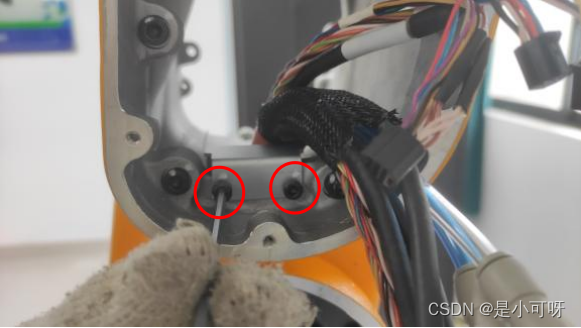
(2)使用M5力矩扳手将红色标记的3个螺钉拆掉,便可取下3轴电机和同步带。


(3)将固定管线的轧带用斜口钳剪断,使用M4力矩扳手拆卸钣金件M4螺丝2个,再将管线从关节处过线。

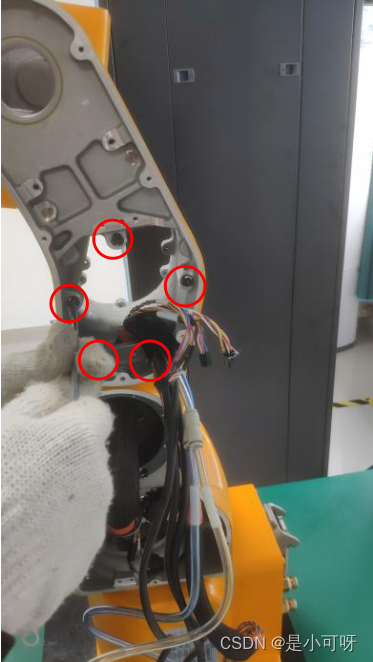
(4)使用M5力矩扳手将红色标记的螺钉(一共5个)拆掉,便可取下大臂2部分。

(5)使用M3力矩扳手将红色标记的螺钉(一共16个)拆掉,便可取下小臂部分。

(6)使用M4力矩扳手将红色标记的16个圆柱头螺钉卸掉,便可分离转座和底座。
3.3 2轴拆装步骤
(1)使用M4力矩扳手将红色标记的螺钉卸掉,用斜口钳剪断轧带,取下钣金件,分离2轴电机接头。

(2)使用M4力矩扳手将红色标记的螺钉(一共8个)卸掉,把两个M4的长螺钉拧进顶丝孔,缓慢对称的将轴承支撑顶出。


(3)使用M6力矩扳手将红色标记的2个螺钉卸掉,将2轴电机和同步带取出。


(4)使用M4力矩扳手将红色标记的螺钉(一共16+12个)卸掉,将2轴减速器取出,并分离大臂和转座部分。


3.4 机器人底座
(1)使用M4力矩扳手将红色标记的螺钉卸掉,用斜口钳剪断轧带,取出钣金件,从底部将电池拿出来,分离接头,便可取出电池。

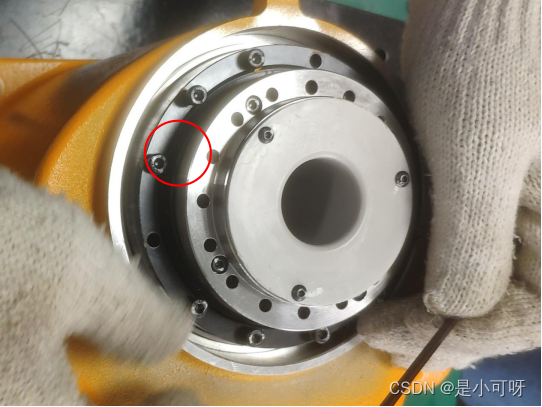
(2)打开航插盖板,可以看到连接电机的四个螺钉(红色标记处),使用M5力矩扳手将螺钉卸掉,便可取出电机和同步带。


(3))将管线包从底座中拉出,使用M4力矩扳手将红色标记处的一圈12个螺钉卸掉,便可拆卸1轴减速器。
4 其他


本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!