YASKAWA MOTOMAN 机器人程序命令编辑
透过程序命令,可使机器人除示教点位间移动之外,可以进行相对应的动作或运算功能。DX100系统可以搭配使用的命令种类相当多元,除基本的制御、出入力、演算功能外,另外针对各种专用
用途另有相对应的命令可供应用。
在编辑中使用[命令一览]键可切换命令选单,在以[方向键]移动光标选择所要使用的命令,按[选
择]键选定后进行操作。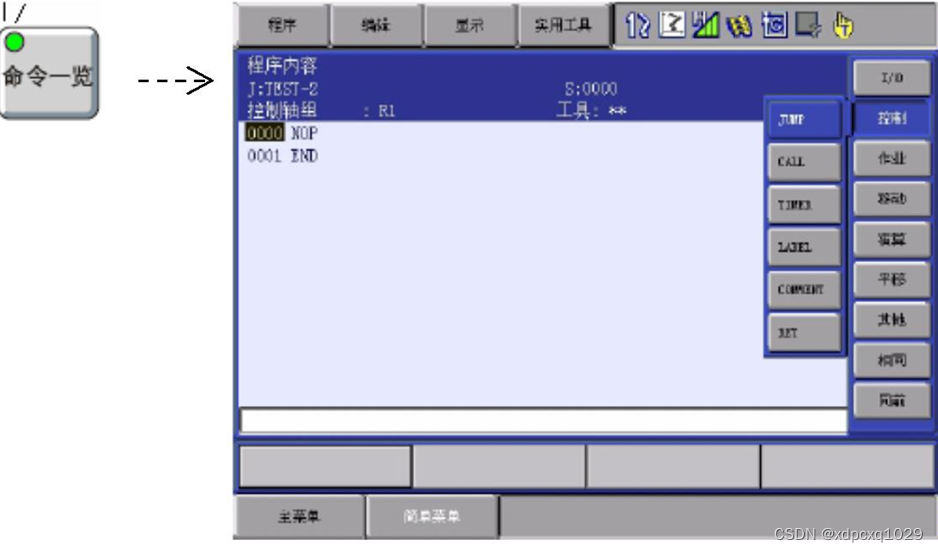
输出入(I/O)命令
输出入命令主要用途在于控制机器人与外部设备及系统集成间的输出/输入接点。
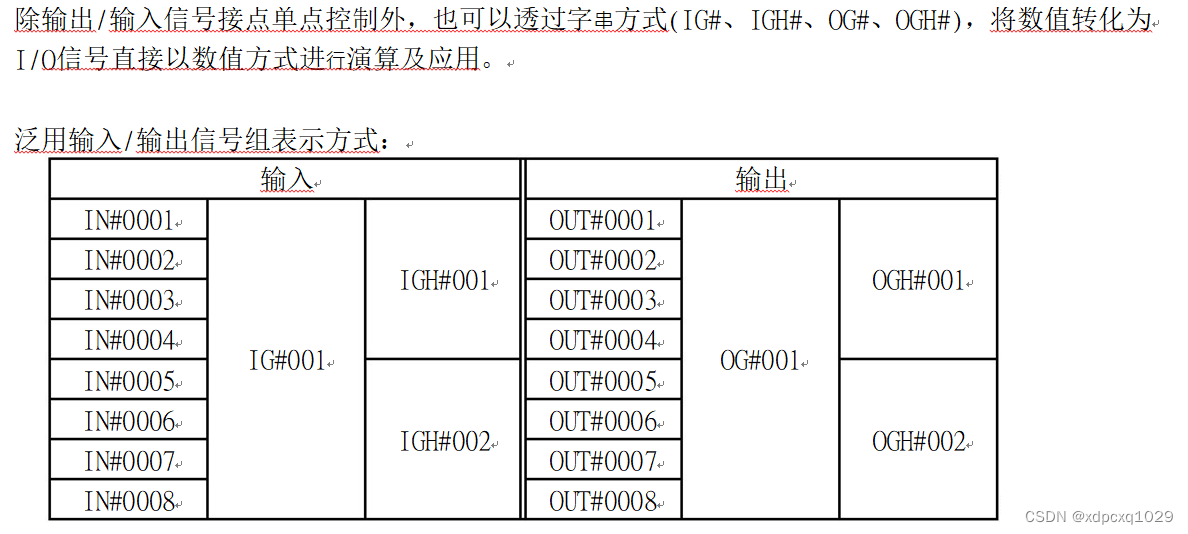
DX100系统基本配置为泛用出入力信号输入40个点位,输出40个点位,皆可以透过输出入命令进行控制及应用。
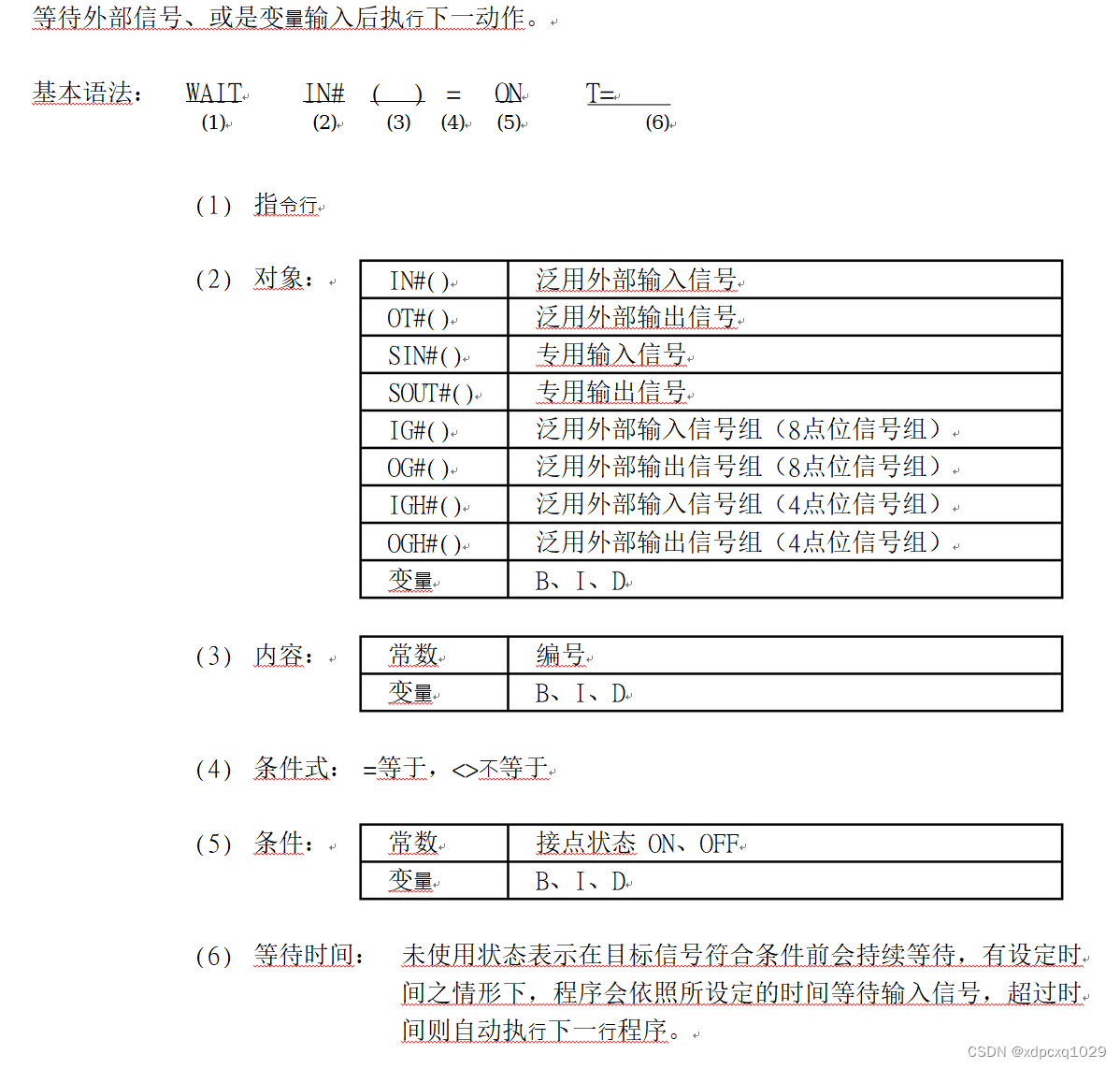
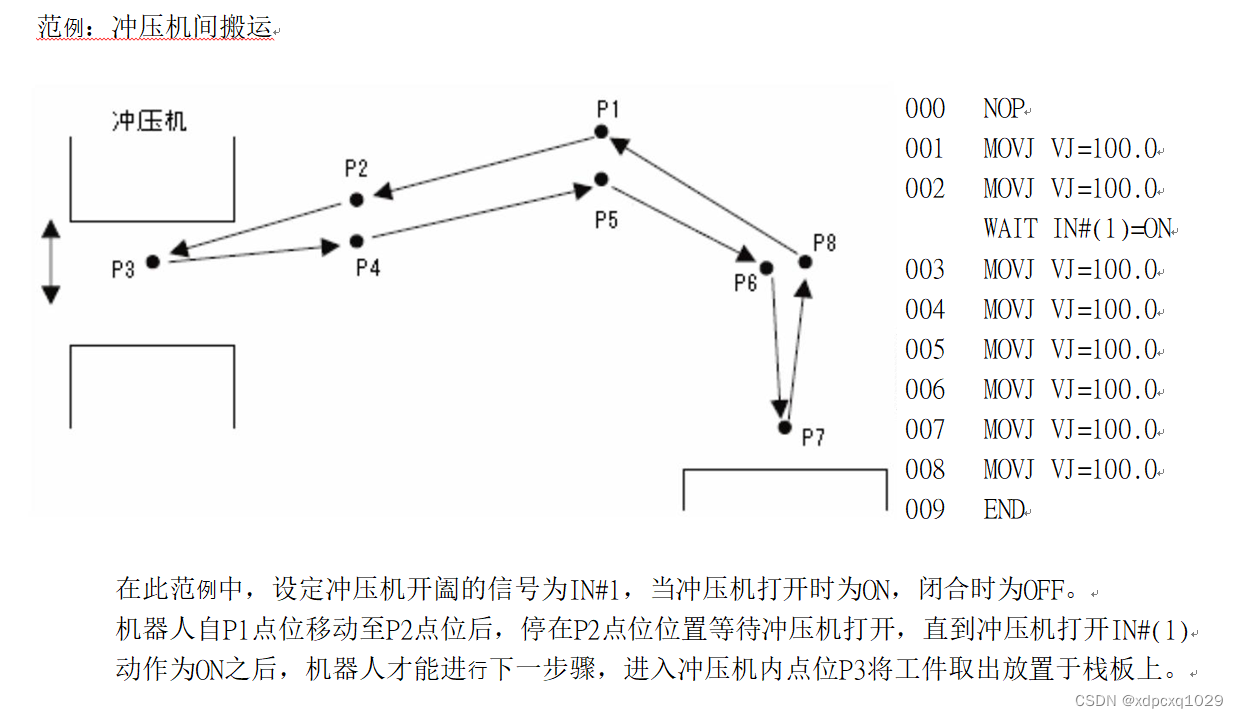
WAIT 输入:
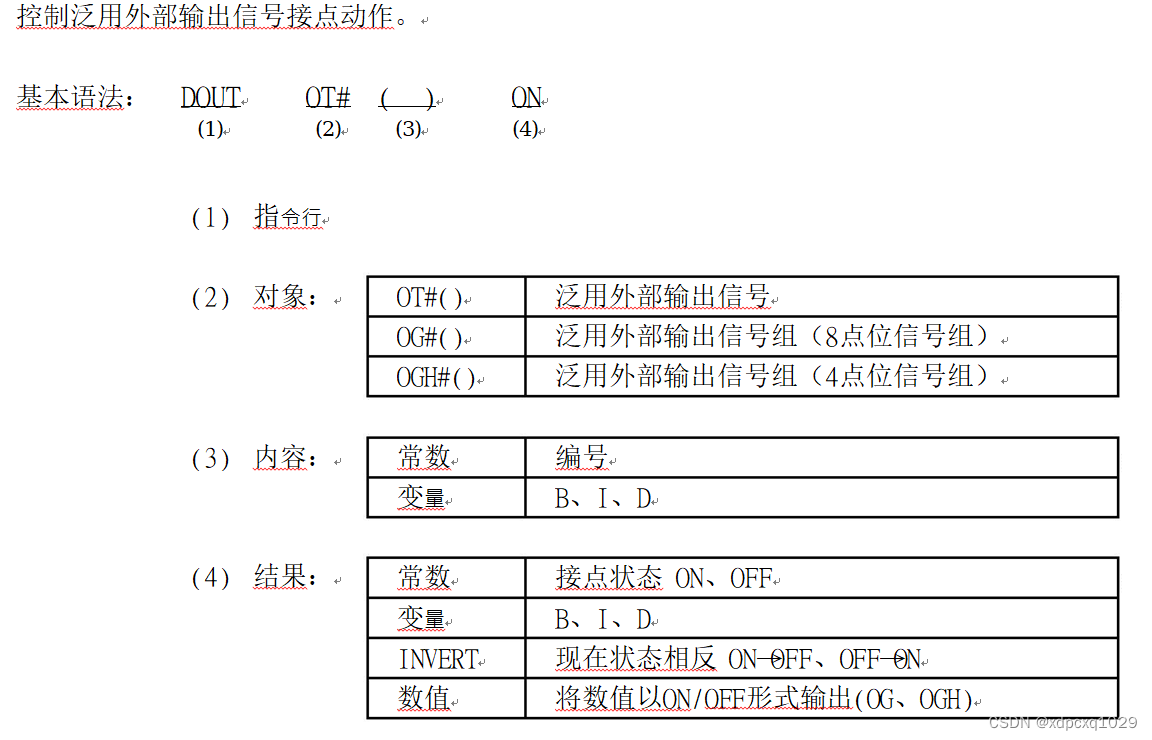
DOUT 输出:
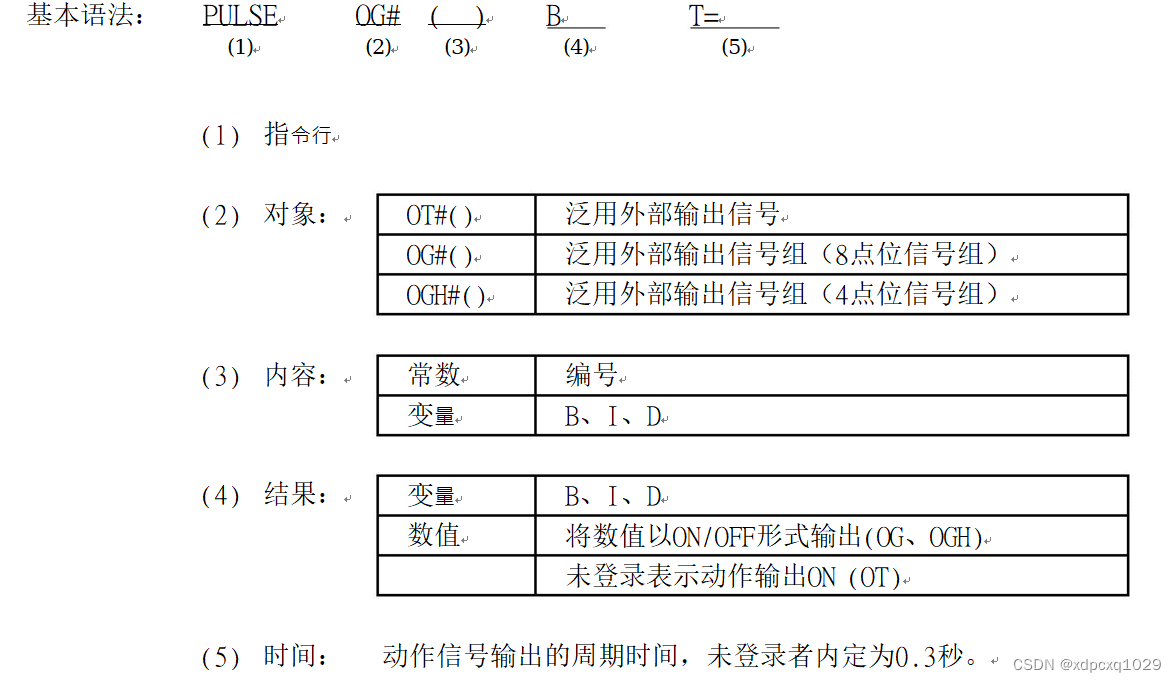
PULSE 脉冲输出
控制泛用外部输出信号接点动作输出信号一个时间周期后回复原本状态
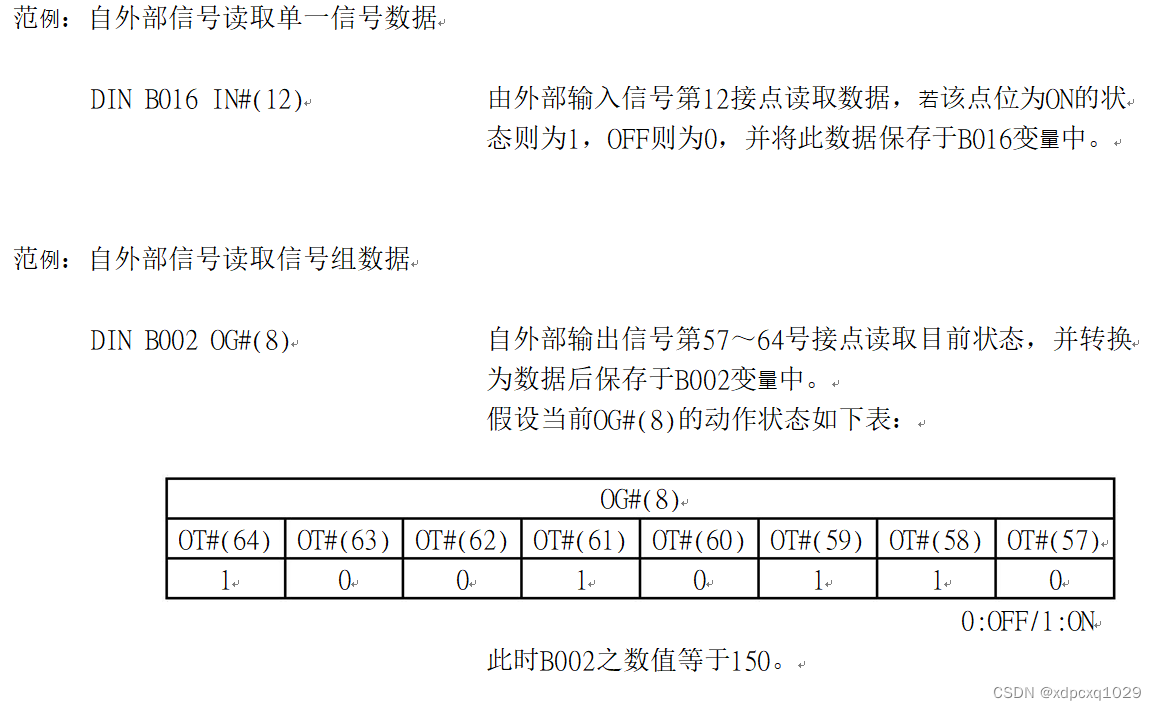
DIN 数据读取:
透过外部信号将接点动作转换为数值型态并存入变量中保存
JUMP 跳转
指令程序跳至特定位置,如指定旗标、副程序等。使用跳转功能需注意程序跳转之后并不会自动
回到原本位置,需再另外指定,此情形较常发生在二个程序间跳转时发生错误,需特别注意。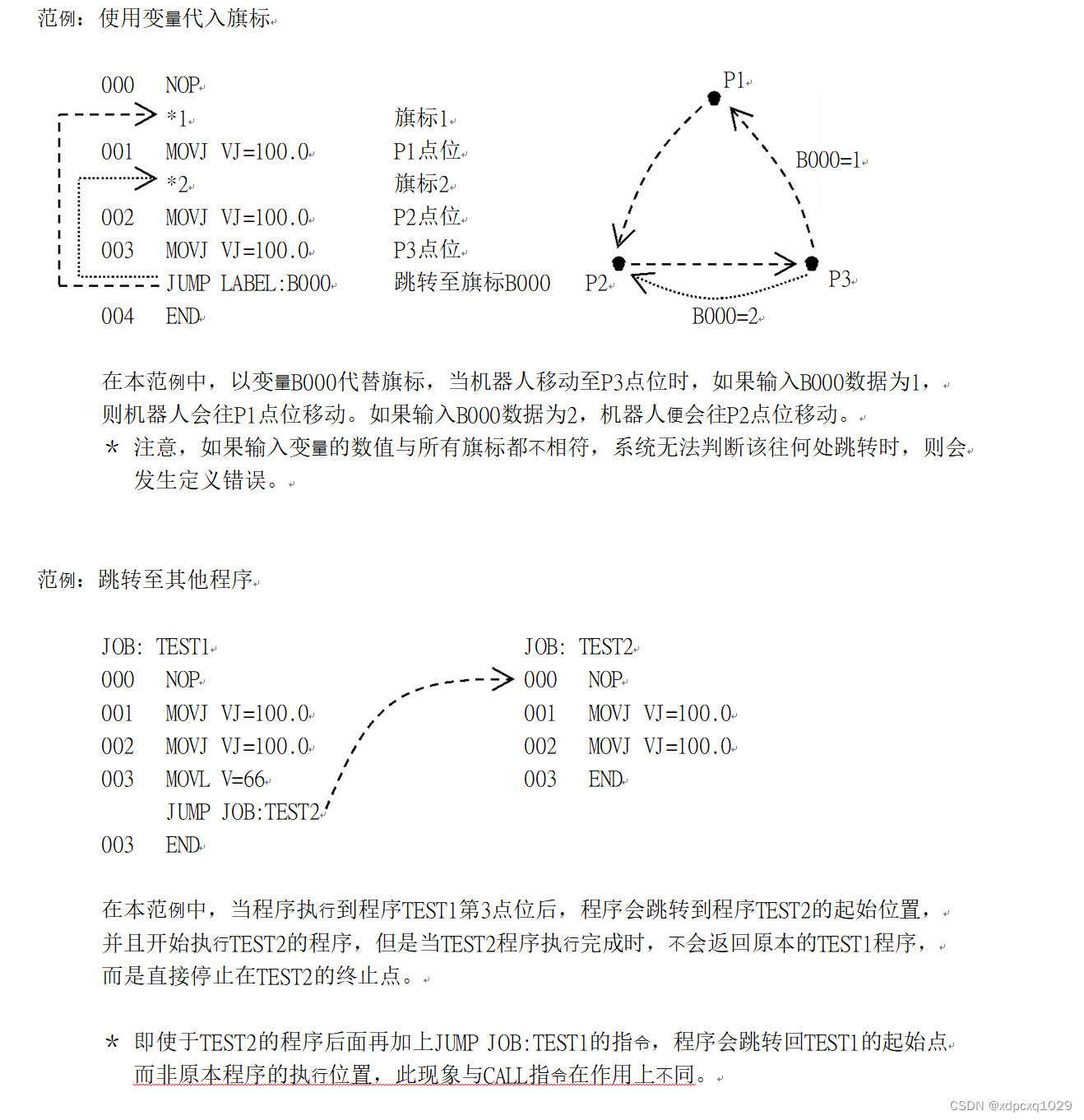
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!