C语言实现杆臂误差补偿
这里写自定义目录标题
- 原理
- 源码
原理
不同导航系统的导航信息进行比对和融合,必须对导航信息实施转换,转换至统一的参考基准下表示。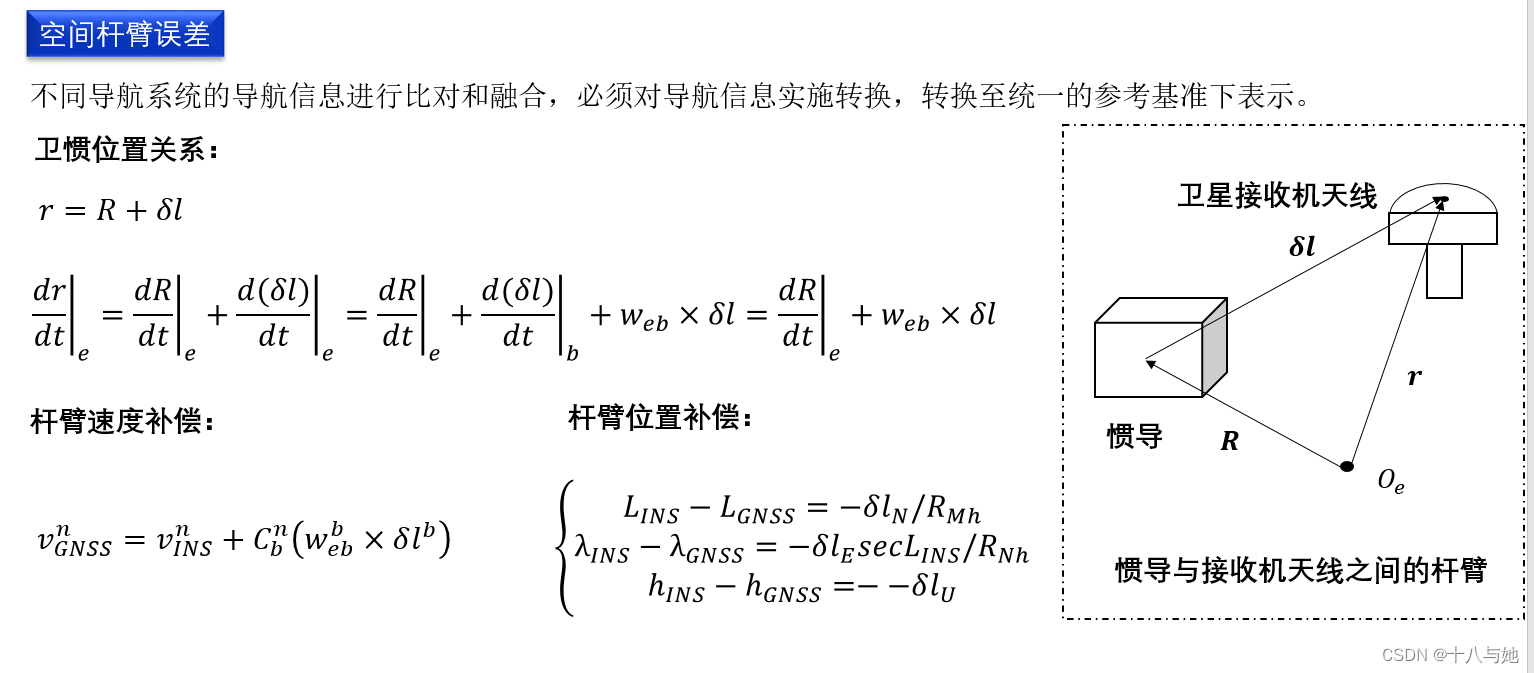
源码
/* ins lever arm parameters compensation function -----------------------------------------------------------
* ins lever arm parameters compensation function
* args : struct ins I ins structure
* double* lever I matrix lever (3 x 1)
* return : ins structure
*-----------------------------------------------------------------------------*/
extern void inslever(in本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!