STM32学习之SPI
SPI:串行外围设备接口
应用领域:EEPROM,FLASH,实时时钟,AD转换器等等
SPI是一种高速的、全双工、同步的通信总线,在芯片的管脚只占有4根
SPI接口一般使用4根线通信
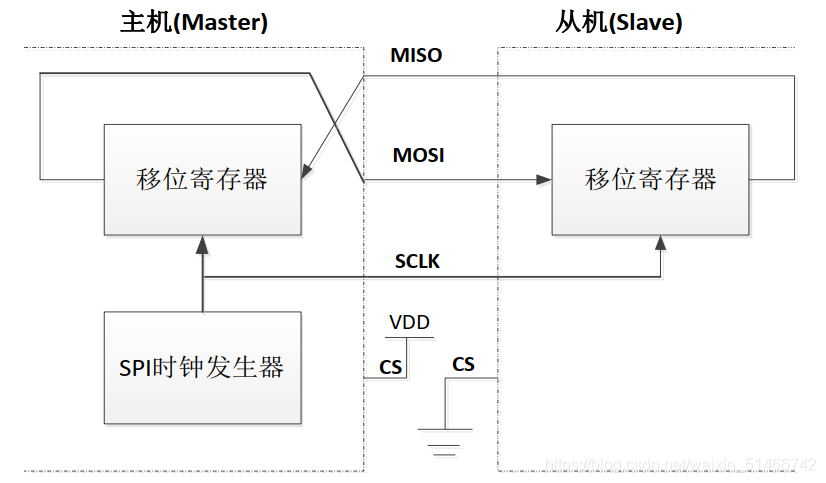
MISO 主设备数据输入,从设备数据输出
MOSI 主设备数据输出,从设备数据输入
SCLK 时钟信号,由主设备产生
CS 从设备片选信号,由主设备控制
从图中,主机和从机各有一个移位寄存器,每发起一次传输时,MOSI信号线把主机数据传送给从机,MISO信号线把从机数据传送给主机,两个寄存器中的内容被交换
如果只进行写操作,则主机忽略接受到的字节
如果只进行读操作,则主机可以发送一个空字节来引发接受从机发出的字节
SPI总线四种工作方式
SPI要求同步通信,那么要求主机和从机双方具有同频同相的同步时钟信号
同频:主机和从机采用同一时钟
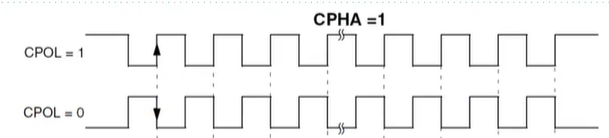
接下来就考虑对同步时钟的极性(CPOL)和相位(CPHA)进行配置
CPOL=0:串行同步时钟的空闲状态为低电平
CPOL=1;串行同步时钟的空闲状态为高电平
CPHA=0:串行同步时钟的第一个跳变沿(上升或下降)数据被采样
CPHA=1:串行同步时钟的第二个跳变沿(下降或上升)数据被采样
比如,以下图为例
SPI的初始化
以笔者的开发板实验为例
SPI_InitTypeDef SPI_InitStructure;SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPISPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式SPI_Init(SPI2, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器参数SPI_Direction:设置通信模式,半双工,全双工,串行发,串行收四种
参数SPI_Mode:设置主从模式,主机模式,从机模式两种
参数SPI_DataSize:设置帧格式选择,8位,16位两种
参数SPI_CPOL:设置时钟极性,空闲状态为高,低两种
参数SPI_CPHA:设置时钟相位,选择第一个跳变沿,第二个跳变沿两种
参数SPI_NSS:设置硬件控制,软件控制两种
参数SPI_BaudRatePrescaler:设置波特率预分频值,从不分频到256分频有8个选择,
传输速度:72M/256=281.25KHz
参数SPI_FirstBit:设置数据传输顺序,MSB位在前,LSB位在前两种
LSB:least significant bit 表示二进制数据的最低位
MSB : most significant bit 表示二进制数据的最高位
参数SPI_CRCPolynomial:设置CRC校验多项式,提高通信可靠性,大于1即可
———————————————————————————————————————————
参考资料:《STMF1开发指南—库函数版》 正点原子
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!