寻找两个点云重叠部分
目录
- 方法1:
- 方法1实验效果:
- 方法2(c++):
- 方法2(python)
- 方法2实验效果:
- 结论:
网上大部分寻找重叠区域都是对一个点云建立kdtree,然后在r半径内搜索另外一个点云的点。这种方法适合两个点云完全一样。一般的点云数据并不完全一样,例如两条航带的点云,并不完全相同,如果应用这方法会损失很多点,造成特征计算的不准确性。下面介绍两种方法:
写在前面的结论:第二种方法速度和精度上均优于第一种方法(octree yyds!!!)
方法1:
(1)假设有两组点云A,B,计算A的OBB包围盒
(2)寻找点云A的OBB包围盒内的点云B,这样就得到点云B相对A的重叠区域
(3)反之计算,得到点云A相对于B的重叠区域
(4)综上可以得到一组重叠区域的点云,可用于后续分析。
show the codes
// 提取点云重叠区域.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//#include 方法1实验效果:
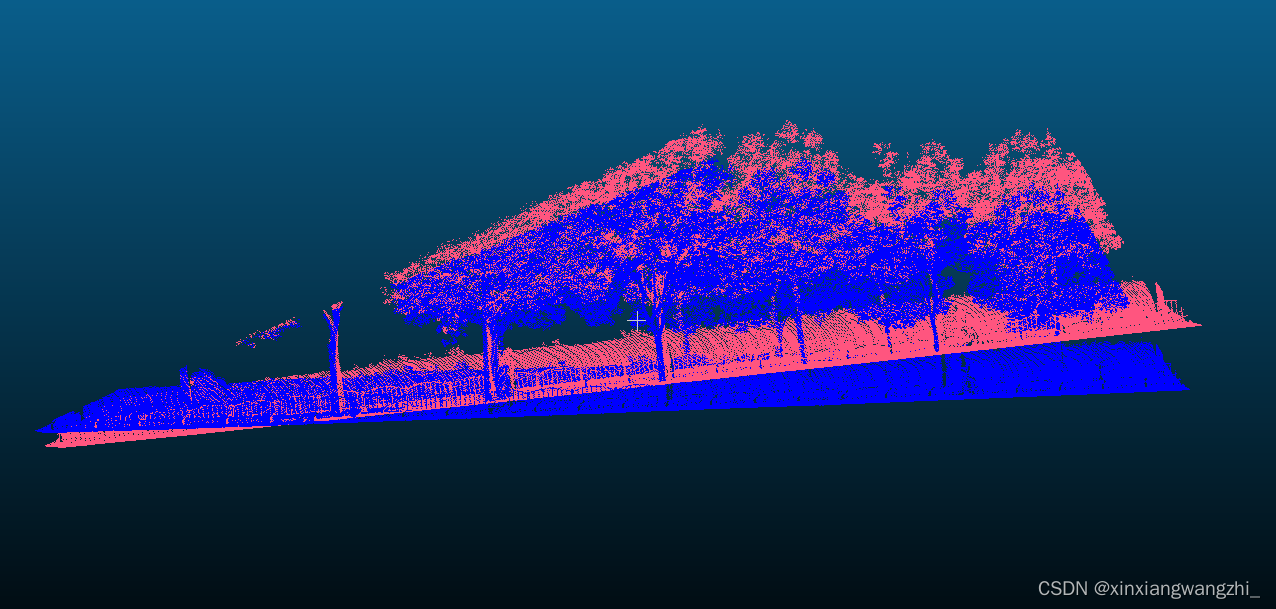
原始点云:
图中白色点云为原始红色点云的重叠区域:
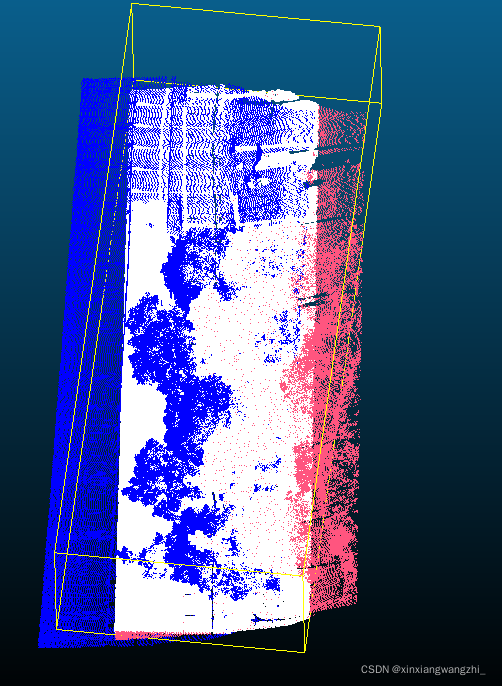
绿色点云为蓝色原始点云的重叠区域:
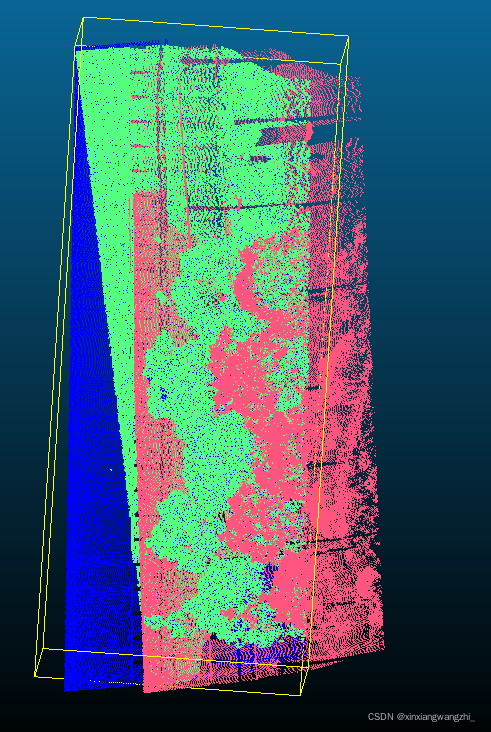
耗时:
结论:从图上看,这种方法只能粗略点云重叠区域,提取的重叠区域与实际重叠区域存在一定偏差。
方法2(c++):
(1)假设有两组点云A,B,对A建立八叉树
(2)遍历B中所有点,查询其对应的A的体素是否存在点云(即同一体素中是否同时存在AB点云),若存在,则该点为B点云的重叠点云
(3)同理,得到A中重叠点云
show the codes
// 提取点云重叠区域2.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//#include overlapped_2; for (size_t i = 0; i < cloud2.size(); ++i){//新增判断,防止越界if (cloud2.points[i].x>max_pt.x|| cloud2.points[i].y > max_pt.y || cloud2.points[i].z > max_pt.z || cloud2.points[i].x < min_pt.x || cloud2.points[i].y < min_pt.y || cloud2.points[i].z < min_pt.z){continue;}std::vector<int> indices;octree.voxelSearch(cloud2.points[i], indices);pcl::PointCloud<point> cloud_out;if (indices.size()){overlapped_cloud2.push_back(cloud2.points[i]);}}
}
int main()
{auto start = std::clock();pcl::PointCloud<point> cloud1, cloud2;pcl::io::loadPCDFile<point>("D:/1重叠.pcd", cloud1);pcl::io::loadPCDFile<point>("D:/2重叠.pcd", cloud2);cloud overlapped1, overlapped2;getOverlappedCloud(cloud1, cloud2, overlapped2);getOverlappedCloud(cloud2, cloud1, overlapped1);pcl::io::savePCDFile("D:/11重叠.pcd", overlapped1);pcl::io::savePCDFile("D:/22重叠.pcd", overlapped2);auto end = std::clock();std::cerr << "耗时" << std::difftime(end, start) << "ms" << std::endl;std::cout << "Hello World!\n";
}方法2(python)
import open3d as o3ddef find_overlapped_cloud(cloud1, cloud2):overlapped_cloud_indices = []octree = o3d.geometry.Octree(max_depth=4)octree.convert_from_point_cloud(cloud1, size_expand=0.01)min_pt = octree.get_min_bound()max_pt = octree.get_max_bound()for point in cloud2.points:if point[0] < min_pt[0] or point[1] < min_pt[1] or point[2] < min_pt[2] or \point[0] > max_pt[0] or point[1] > max_pt[1] or point[2] > max_pt[2]:continueelse:leaf_node, leaf_info = octree.locate_leaf_node(point)if leaf_info is not None:indices = leaf_node.indicesfor indice in indices:overlapped_cloud_indices.append(indice)return cloud1.select_by_index(overlapped_cloud_indices)if __name__ == '__main__':"read cloud"cloud1 = o3d.io.read_point_cloud("D:/1重叠.pcd")cloud2 = o3d.io.read_point_cloud("D:/2重叠.pcd")"find overlapped cloud"overlapped_cloud1 = find_overlapped_cloud(cloud2, cloud1)overlapped_cloud2 = find_overlapped_cloud(cloud1, cloud2)"save cloud"o3d.io.write_point_cloud("D:/o3d_overlapped1.pcd", overlapped_cloud1)o3d.io.write_point_cloud("D:/o3d_overlapped2.pcd", overlapped_cloud2)
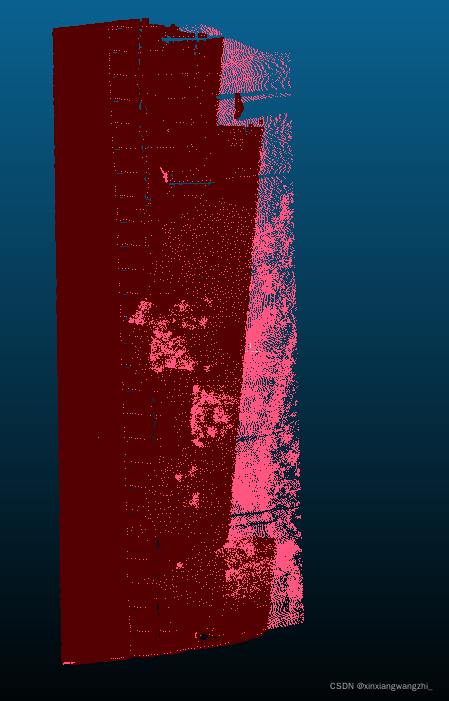
方法2实验效果:
黄色为重叠区域
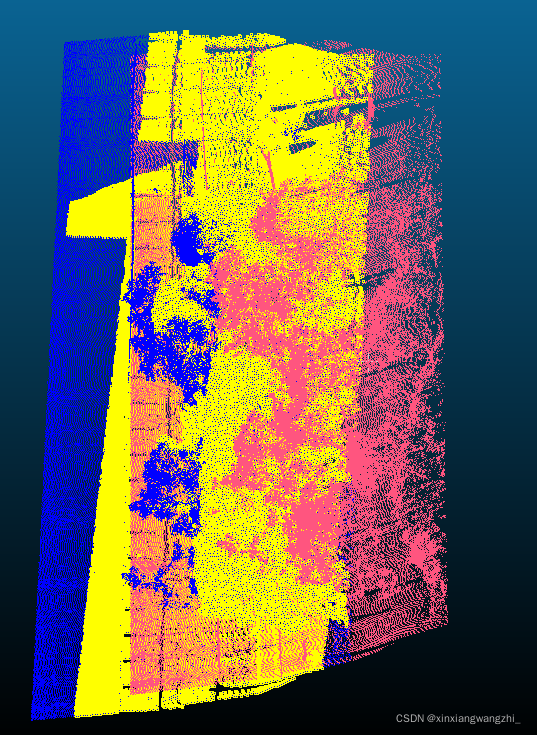
棕色为重叠区域
耗时:
结论:
第二种方法速度和精度上均优于第一种方法
写在后面的参考资料:
寻找点云OBB
旋转点云
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!