arduino 操纵杆_Arduino – 基于Web的操纵杆
材料:
Arduino uno
PHPoC WiFi Shield for Arduino
伺服电机SG90
布线
在Arduino上堆叠PHPoC WiFi Shield
将两个伺服电机的引脚GND和VCC分别连接到GND和5V的Arduino。(arduino的引脚IOREF可以像5V引脚一样使用)
将两个伺服电机的引脚信号分别连接到Arduino的引脚8和引脚9。
数据流
Web浏览器—> PHPoC WiFi Shield —> Arduino
Web浏览器上的Web应用程序将通过WebSocket将触摸或单击事件的坐标(缩放后)发送到PHPoC shield。收到数据后,PHPoC shield会自动将其传递给Arduino。Arduino根据从PHPoC Shield收到的数据控制两个伺服电机。
请注意: PHPoC shield有一个内置程序,用于将数据从Web浏览器传递到Arduino。因此,我们不需要关心它。
需要做什么?1.设置PHPoC shield的Wifi信息(SSID和密码)
2.将新UI上传到PHPoC shield
3.写Arduino代码
设置PHPoC Shield的Wifi信息
将新的Web UI上传到PHPoC Shield下载PHPoC源代码remote_joystick.php(代码部分)。
根据此指令,使用PHPoC调试器将其上载到PHPoC shield 。
写Arduino代码在Arduino IDE上为Arduino安装PHPoC库(参见说明)
请参阅代码部分中的源代码。
单击Arduino IDE上的串行按钮以查看IP地址。
打开Web浏览器,输入 http://replace_ip_address/remote_joystick.php
单击“连接”按钮进行测试。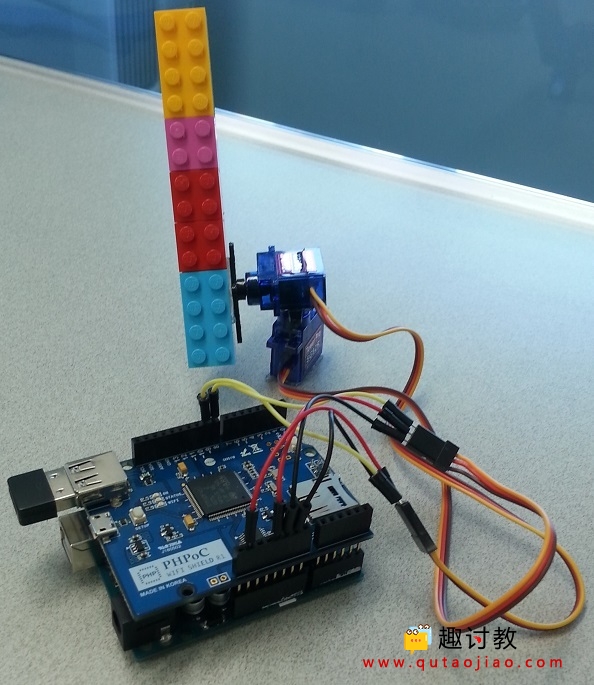
代码:
web页面代码及arduino代码:
隐藏内容,您需要满足以下条件方可查看
End
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!