机器学习技法 之 矩阵分解(Matrix Factorization)
线性神经网络(Linear Network Hypothesis)
这里用推荐系统的应用实例引出矩阵分解:
现在有一个电影评分预测问题,那么数据集的组成为:
{ ( x ~ n = ( n ) , y n = r n m ) : user n rated movie m } \left\{ \left( \tilde { \mathbf { x } } _ { n } = ( n ) , y _ { n } = r _ { n m } \right) : \text { user } n \text { rated movie } m \right\} {(x~n=(n),yn=rnm): user n rated movie m}
其中 x ~ n = ( n ) \tilde { \mathbf { x } } _ { n } = (n) x~n=(n) 是一种抽象的类别(categorical)特征。
什么是类别特征呢?举例来说:比如ID号,血型(A,B,AB,O),编程语言种类(C++,Python,Java)。
但是大部分机器学习算法都是基于数值型特征实现的,当然决策树除外。所以现在需要将类别特征转换(编码,encoding)为数值特征。这里需要转换的特征是ID号。使用的工具是二值向量编码(binary vector encoding),也就是向量的每个元素只有两种数值选择,这里选择的是 0/1 向量编码,对应关系是向量中的第 ID 个元素为 1,其他元素均为 0。
那么第 m 个电影编码后的数据集 D m \mathcal D_m Dm 可以表示为:
{ ( x n = Binary VectorEncoding ( n ) , y n = r n m ) : user n rated movie m } \left\{ \left( \mathbf { x } _ { n } = \text { Binary VectorEncoding } ( n ) , y _ { n } = r _ { n m } \right) : \text { user } n \text { rated movie } m \right\} {(xn= Binary VectorEncoding (n),yn=rnm): user n rated movie m}
如果将全部的电影数据整合到一起的数据集 D \mathcal D D 可以表示为:
{ ( x n = Binary VectorEncoding ( n ) , y n = [ r n 1 ? ? r n 4 r n 5 … r n M ] T ) } \left\{ \left( \mathbf { x } _ { n } = \text { Binary VectorEncoding } ( n ) , \mathbf { y } _ { n } = \left[ \begin{array} { l l l l l l } r _ { n 1 } & ? & ? & r _ { n 4 } & r _ { n 5 } & \ldots & r _ { n M } \end{array} \right] ^ { T } \right) \right\} {(xn= Binary VectorEncoding (n),yn=[rn1??rn4rn5…rnM]T)}
其中 ? ? ? 代表了该电影未评分。
现在的想法是使用一个 N − d ~ − M N - \tilde { d } - M N−d~−M 神经网络进行特征提取:
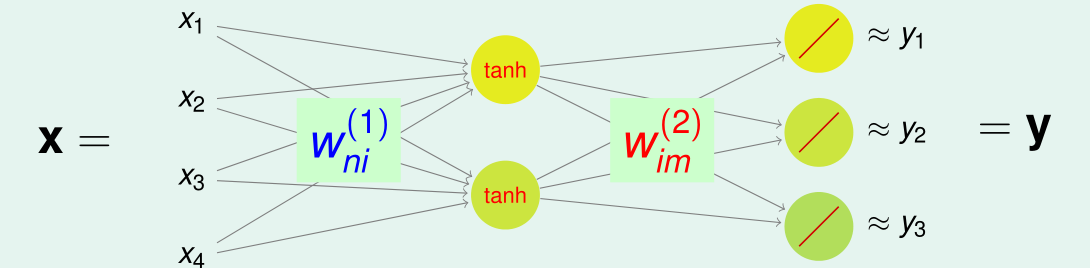
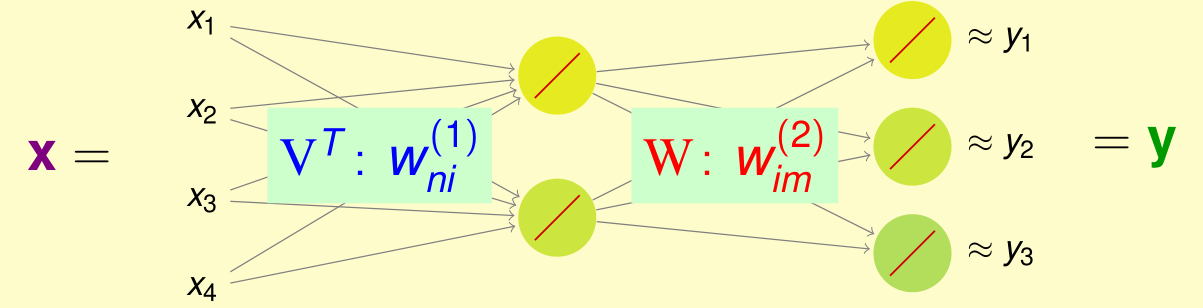
现在先使用线性的激活函数,那么由此得到的线性神经网络的结构示意图为:
基本矩阵分解(Basic Matrix Factorization)
那么现在将权重矩阵进行重命名:
V T for [ w n i ( 1 ) ] and W for [ w i m ( 2 ) ] \mathrm { V } ^ { T } \text { for } \left[ w _ { n i } ^ { ( 1 ) } \right] \text { and } \mathrm { W } \text { for } \left[ w _ { i m } ^ { ( 2 ) } \right] VT for [wni(1)] and W for [wim(2)]
那么假设函数可以写为:
h ( x ) = W T V x ⏟ Φ ( x ) \mathrm { h } ( \mathrm { x } ) = \mathrm { W } ^ { T } \underbrace { \mathrm { Vx } } _ { \Phi ( \mathrm { x } ) } h(x)=WTΦ(x) Vx
矩阵 V \mathrm { V } V 实际上就是特征转换 Φ ( x ) \Phi ( \mathrm { x } ) Φ(x),然后再使用 W \mathrm { W } W 进行实现一个基于转换数据的线性模型。那么根据 ID 的数值编码规则,第 n n n 个用户的假设函数可以写为:
h ( x n ) = W T v n , where v n is n -th column of V \mathrm { h } \left( \mathrm { x } _ { n } \right) = \mathrm { W } ^ { T } \mathbf { v } _ { n } , \text { where } \mathbf { v } _ { n } \text { is } n \text { -th column of } \mathrm { V } h(xn)=WTvn, where vn is n -th column of V
第 m m m 个电影的假设函数可以写为:
h m ( x ) = w m T Φ ( x ) h _ { m } ( \mathbf { x } ) = \mathbf { w } _ { m } ^ { T } \mathbf { \Phi } ( \mathbf { x } ) hm(x)=wmTΦ(x)
那么对于推荐系统来说现在需要进行 W \mathrm { W } W 和 V \mathrm { V } V 的最优解求取。
对于 W \mathrm { W } W 和 V \mathrm { V } V 来说理想状态是:
r n m = y n ≈ w m T v n = v n T w m ⟺ R ≈ V T W r _ { n m } = y _ { n } \approx \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n }= \mathbf { v } _ { n } ^ { T } \mathbf { w } _ { m } \Longleftrightarrow \mathbf { R } \approx \mathbf { V } ^ { T } \mathbf { W } rnm=yn≈wmTvn=vnTwm⟺R≈VTW
也就是说特征转换矩阵 V \mathbf { V } V 和线性模型矩阵 W \mathbf { W } W 相乘的结果是评分矩阵。

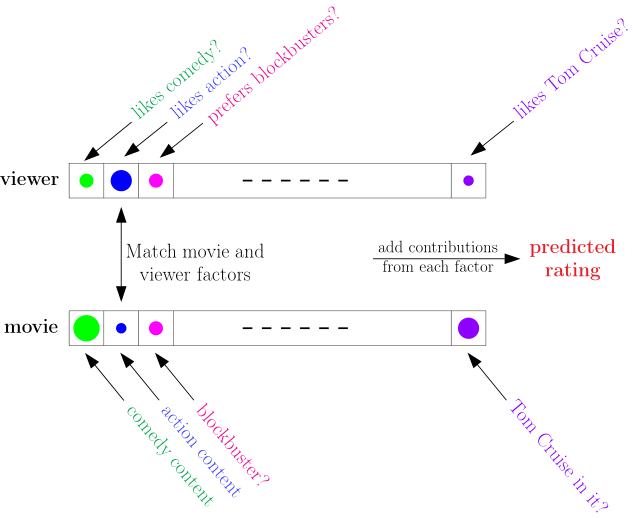
还记得在机器学习基石中的评分预测示意图吗?观看者和电影都有自己的特征向量,只需要计算两个向量的相似度便可以用了预测评分。观看者和电影向量在这里指的是 v n \mathbf { v } _ { n } vn 和 w m \mathbf { w } _ { m } wm。
那么对于数据集 D \mathcal D D ,该假设函数的基于平方误差的误差测量为:
E i n ( { w m } , { v n } ) = 1 ∑ m = 1 M ∣ D m ∣ ∑ user n rated movie m ( r n m − w m T v n ) 2 E _ { \mathrm { in } } \left( \left\{ \mathbf { w } _ { m } \right\} , \left\{ \mathbf { v } _ { n } \right\} \right) = \frac { 1 } { \sum _ { m = 1 } ^ { M } \left| \mathcal { D } _ { m } \right| } \sum _ { \text {user } n \text { rated movie } m } \left( r _ { n m } - \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n } \right) ^ { 2 } Ein({wm},{vn})=∑m=1M∣Dm∣1user n rated movie m∑(rnm−wmTvn)2
那么现在就要根据数据集 D \mathcal D D 进行 v n \mathbf { v } _ { n } vn 和 w m \mathbf { w } _ { m } wm 的学习来保证误差最小。
min W , V E i n ( { w m } , { v n } ) ∝ ∑ u s e r n rated movie m ( r n m − w m T v n ) 2 = ∑ m = 1 M ( ∑ ( x n , r n m ) ∈ D m ( r n m − w m T v n ) 2 ) ( 1 ) = ∑ n = 1 N ( ∑ ( x n , r n m ) ∈ D m ( r n m − v n T w m ) 2 ) ( 2 ) \begin{aligned} \min _ { \mathrm { W } , \mathrm { V } } E _ { \mathrm { in } } \left( \left\{ \mathbf { w } _ { m } \right\} , \left\{ \mathbf { v } _ { n } \right\} \right) & \propto \sum _ { \mathrm { user } n \text { rated movie } m } \left( r _ { n m } - \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n } \right) ^ { 2 } \\ & = \sum _ { m = 1 } ^ { M } \left( \sum _ { \left( \mathbf { x } _ { n } , r _ { n m } \right) \in \mathcal { D } _ { m } } \left( r _ { n m } - \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n } \right) ^ { 2 } \right) (1)\\ & = \sum _ { n = 1 } ^ { N } \left( \sum _ { \left( \mathbf { x } _ { n } , r _ { n m } \right) \in \mathcal { D } _ { m } } \left( r _ { n m } - \mathbf { v } _ { n } ^ { T } \mathbf { w } _ { m } \right) ^ { 2 } \right) (2) \end{aligned} W,VminEin({wm},{vn})∝usern rated movie m∑(rnm−wmTvn)2=m=1∑M⎝⎛(xn,rnm)∈Dm∑(rnm−wmTvn)2⎠⎞(1)=n=1∑N⎝⎛(xn,rnm)∈Dm∑(rnm−vnTwm)2⎠⎞(2)
由于上式中有 v n \mathbf { v } _ { n } vn 和 w m \mathbf { w } _ { m } wm 两个变量,同时优化的话可能会很困难,所以基本的想法是使用交替最小化操作(alternating minimization):
- 固定 v n \mathbf { v } _ { n } vn,也就是说固定用户特征向量,然后求取每一个 w m ≡ minimize E in within D m \mathbf { w } _ { m } \equiv \text { minimize } E _ { \text {in } } \text { within } \mathcal { D } _ { m } wm≡ minimize Ein within Dm。
- 固定 w m \mathbf { w } _ { m } wm,也就是说电影的特征向量,然后求取每一个 v n ≡ minimize E in within D m \mathbf { v } _ { n } \equiv \text { minimize } E _ { \text {in } } \text { within } \mathcal { D } _ { m } vn≡ minimize Ein within Dm。
这一过程叫做交替最小二乘算法(alternating least squares algorithm)。该算法的具体实现如下:
initialize d ~ dimension vectors { w m } , { v n } alternating optimization of E in : repeatedly optimize w 1 , w 2 , … , w M : update w m by m -th-movie linear regression on { ( v n , r n m ) } optimize v 1 , v 2 , … , v N : update v n by n -th-user linear regression on { ( w m , r n m ) } until converge \begin{array} { l } \text { initialize } \tilde { d } \text { dimension vectors } \left\{ \mathbf { w } _ { m } \right\} , \left\{ \mathbf { v } _ { n } \right\} \\ \text { alternating optimization of } E _ { \text {in } } : \text { repeatedly } \\ \qquad \text { optimize } \mathbf { w } _ { 1 } , \mathbf { w } _ { 2 } , \ldots , \mathbf { w } _ { M } \text { : } \text { update } \mathbf { w } _ { m } \text { by } m \text { -th-movie linear regression on } \left\{ \left( \mathbf { v } _ { n } , r _ { n m } \right) \right\} \\ \qquad \text { optimize } \mathbf { v } _ { 1 } , \mathbf { v } _ { 2 } , \ldots , \mathbf { v } _ { N } \text { : } \text { update } \mathbf { v } _ { n } \text { by } n \text { -th-user linear regression on } \left\{ \left( \mathbf { w } _ { m } , r _ { n m } \right) \right\} \\ \text { until converge } \end{array} initialize d~ dimension vectors {wm},{vn} alternating optimization of Ein : repeatedly optimize w1,w2,…,wM : update wm by m -th-movie linear regression on {(vn,rnm)} optimize v1,v2,…,vN : update vn by n -th-user linear regression on {(wm,rnm)} until converge
初始化过程使用的是随机(randomly)选取。随着迭代的过程保证了 E in E _ { \text {in } } Ein 不断下降,由此保证了收敛性。交替最小二乘的过程更像用户和电影在跳探戈舞。
线性自编码器与矩阵分解(Linear Autoencoder versus Matrix Factorization)
Linear Autoencoder Matrix Factorization goal X ≈ W ( W T X ) R ≈ V T W motivation special d − d ~ − d linear NNet N − d ~ − M linear NNet solution global optimal at eigenvectors of X T X local optimal via alternating least squares usefulness extract dimension-reduced features extract hidden user/movie features \begin{array}{c|c|c} &\text{Linear Autoencoder}&\text{Matrix Factorization}\\ \hline \text{goal} &\mathrm { X } \approx \mathrm { W } \left( \mathrm { W } ^ { T } \mathrm { X } \right)&\mathbf { R } \approx \mathbf { V } ^ { T } \mathbf { W }\\ \hline \text{motivation}&\text { special } d - \tilde { d } - d \text { linear NNet }&N - \tilde { d } - M \text { linear NNet }\\ \hline \text{solution} &\text { global optimal at eigenvectors of } X ^ { T } X & \text {local optimal via alternating least squares } \\ \hline \text { usefulness} & \text { extract dimension-reduced features } & \text { extract hidden user/movie features } \end{array} goalmotivationsolution usefulnessLinear AutoencoderX≈W(WTX) special d−d~−d linear NNet global optimal at eigenvectors of XTX extract dimension-reduced features Matrix FactorizationR≈VTWN−d~−M linear NNet local optimal via alternating least squares extract hidden user/movie features
所以线性自编码器是一种在矩阵 X \mathrm{X} X 做的特殊的矩阵分解。
随机梯度法(Stochastic Gradient Descent)
相比交替迭代优化,另一种优化思路是随机梯度下降法。
回顾一下矩阵分解的误差测量函数:
E i n ( { w m } , { v n } ) ∝ ∑ user n rated movie m ( r n m − w m T v n ) 2 ⏟ err(user n , movie m , rating r n m ) E _ { \mathrm { in } } \left( \left\{ \mathbf { w } _ { m } \right\} , \left\{ \mathbf { v } _ { n } \right\} \right) \propto \sum _ { \text {user } n \text { rated movie } m } \underbrace { \left( r _ { n m } - \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n } \right) ^ { 2 } } _ { \text {err(user } n , \text { movie } m , \text { rating } r_{nm} )} Ein({wm},{vn})∝user n rated movie m∑err(user n, movie m, rating rnm) (rnm−wmTvn)2
随机梯度下降法高效且简单,可以拓展于其他的误差测量。
由于每次只是拿出一个样本进行优化,那么先观察一下单样本的误差测量:
err ( user n , movie m , rating r n m ) = ( r n m − w m T v n ) 2 \operatorname { err } \left( \text {user } n , \text { movie } m , \text { rating } r _ { n m } \right) = \left( r _ { n m } - \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n } \right) ^ { 2 } err(user n, movie m, rating rnm)=(rnm−wmTvn)2
那么偏导数为:
∇ v n err ( user n , movie m , rating r n m ) = − 2 ( r n m − w m T v n ) w m ∇ w m err ( user n , movie m , rating r n m ) = − 2 ( r n m − w m T v n ) v n \begin{array} { r l } \nabla _ { \mathbf { v } _ { n } } & \operatorname { err } \left( \text { user } n , \text { movie } m , \text { rating } r _ { n m } \right) = - 2 \left( r _ { n m } - \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n } \right) \mathbf { w } _ { m } \\ \nabla _ { \mathbf { w } _ { m } } & \operatorname { err } \left( \text { user } n , \text { movie } m , \text { rating } r _ { n m } \right) = - 2 \left( r _ { n m } - \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n } \right) \mathbf { v } _ { n } \end{array} ∇vn∇wmerr( user n, movie m, rating rnm)=−2(rnm−wmTvn)wmerr( user n, movie m, rating rnm)=−2(rnm−wmTvn)vn
也就是说只对当前样本的 v n \mathbf { v } _ { n } vn 和 w m \mathbf { w } _ { m } wm 有影响,而其他的参数的偏导均为零。总结来说就是:
per-example gradient ∝ − ( residual ) ( the other feature vector ) \text {per-example gradient } \propto - ( \text { residual } ) ( \text { the other feature vector } ) per-example gradient ∝−( residual )( the other feature vector )
那么使用随机梯度下降法求解矩阵分解的实际步骤为:
initialize d ~ dimension vectors { w m } , { v n } randomly for t = 0 , 1 , … , T (1) randomly pick ( n , m ) within all known r n m (2) calculate residual r ~ n m = ( r n m − w m T v n ) (3) SGD-update: v n n e w ← v n o l d + η ⋅ r ~ n m w m o l d w m n e w ← w m o l d + η ⋅ r ~ n m v n o l d \begin{array} { l } \text { initialize } \tilde { d } \text { dimension vectors } \left\{ \mathbf { w } _ { m } \right\} , \left\{ \mathbf { v } _ { n } \right\} \text { randomly } \\ \text{ for } t = 0,1 , \ldots , T \\ \qquad \text { (1) randomly pick } ( n , m ) \text { within all known } r _ { n m } \\ \qquad \text { (2) calculate residual } \tilde { r } _ { n m } = \left( r _ { n m } - \mathbf { w } _ { m } ^ { T } \mathbf { v } _ { n } \right) \\ \qquad \text { (3) SGD-update: } \\ \qquad\qquad\qquad \begin{aligned} \mathbf { v } _ { n } ^ { n e w } & \leftarrow \mathbf { v } _ { n } ^ { o l d } + \eta \cdot \tilde { r } _ { n m } \mathbf { w } _ { m } ^ { o l d } \\ \mathbf { w } _ { m } ^ { n e w } & \leftarrow \mathbf { w } _ { m } ^ { o l d } + \eta \cdot \tilde { r } _ { n m } \mathbf { v } _ { n } ^ { o l d } \end{aligned} \end{array} initialize d~ dimension vectors {wm},{vn} randomly for t=0,1,…,T (1) randomly pick (n,m) within all known rnm (2) calculate residual r~nm=(rnm−wmTvn) (3) SGD-update: vnnewwmnew←vnold+η⋅r~nmwmold←wmold+η⋅r~nmvnold
但是注意一点随机梯度下降法是针对随机选到的样本进行优化的,那么针对一些对时间比较敏感的数据分析任务,比如近期的数据更有效,那么随机梯度下降法的随机选取应该偏重于近期的数据样本,那么效果可能会好一些。如果你明白这一点,那么在实际运用中会更容易修改该算法。
提取模型总结(Map of Extraction Models)
提取模型:思路是将特征转换作为隐变量嵌入线性模型(或者其他基础模型)中。也就是说除了模型的学习,还需要从资料中学到怎么样作转换能够有效的表现资料。
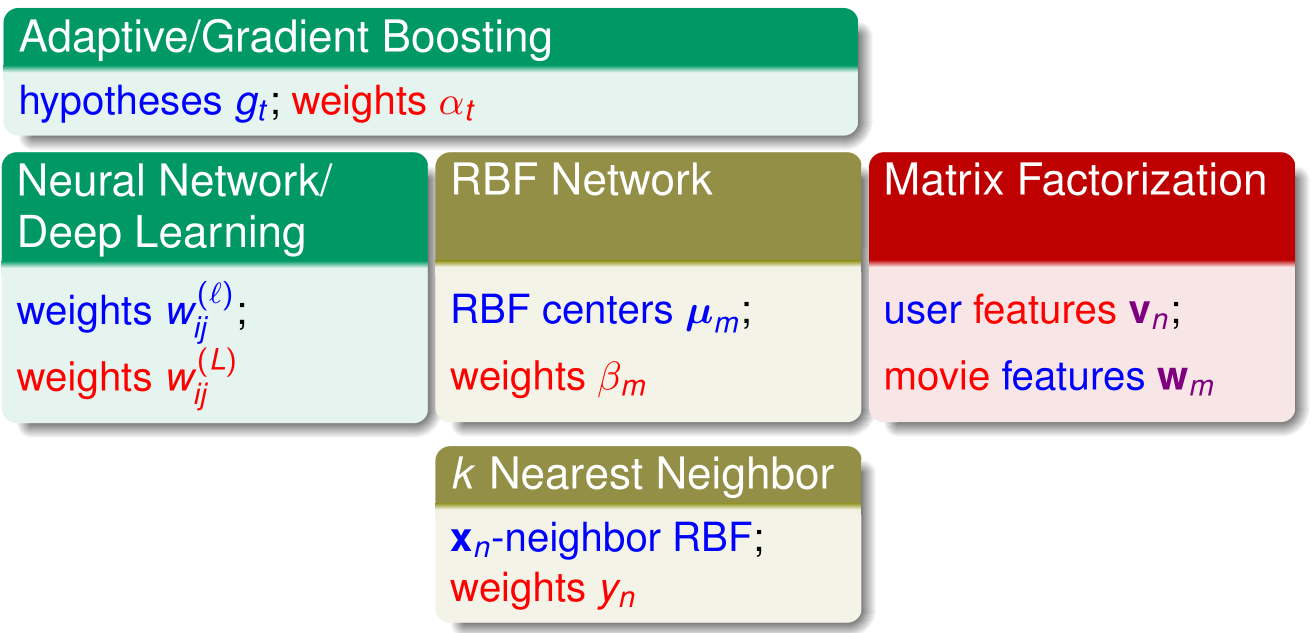
在神经网络或者深度学习中,隐含层的前 L - 1 层( weights w i j ( ℓ ) \text { weights } w _ { i j } ^ { ( \ell ) } weights wij(ℓ))是进行特征的转换,最后一层是线性模型( weights w i j ( L ) \text { weights } w _ { i j } ^ { ( L ) } weights wij(L))。也就是说在学习线性模型的同时,也学到了那些隐藏的转换。
在RBF网络中,最后一层也是线性模型( weights β m \text { weights } \beta _{ m } weights βm,而中间潜藏的变数(中心代表, RBF centers μ m \text { RBF centers } \mu _ { m } RBF centers μm)也是一种特征的学习。
而在矩阵分解中,学习到了两个特征那就是 w m \mathbf { w } _ { m } wm 和 v n \mathbf { v } _ { n } vn,两者可以叫线性模型的权重也可以叫特征向量,这是相对于用户还是电影,不同的对象功能不同。
而在 自适应提升和梯度提升(Adaptive/Gradient Boosting)中,实际上假设函数 g t g_t gt 的求解就是一种特征的学习,而所学习到的系数 α t \alpha_t αt 则是线性模型的权重系数。
相对来说在 k 邻近算法中,这 Top k 的邻居则是一种特征转换。而各个邻居投票系数 y n y_n yn 则是一种线性模型的权重系数。
提取技术总结(Map of Extraction Techniques)
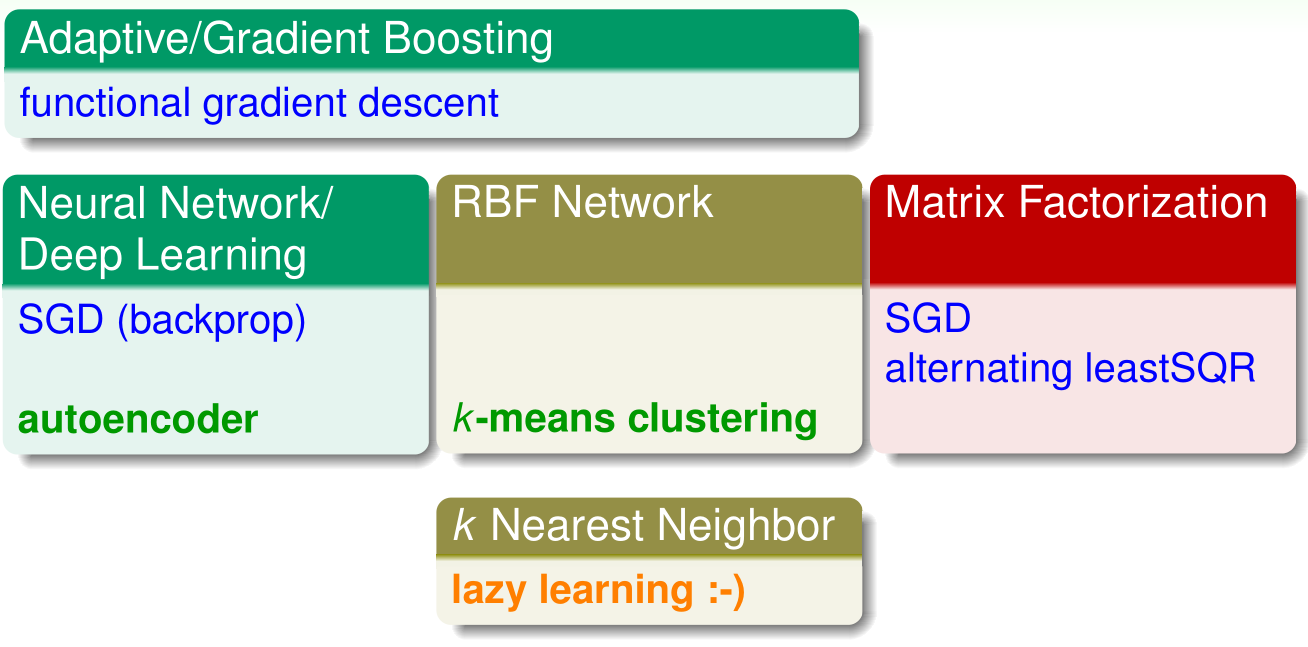
在神经网络或者深度学习中,则使用的是基于随机梯度下降法(SGD)的反向传播算法(backprop)。同时其中有一种特殊的实现:自编码器,将输入和输出保持一样,学习出一种压缩编码。
在RBF网络中,使用 k 均值聚类算法(k-means clustering)找出那些中心。
而在矩阵分解中,则可以使用的是 交替最小二乘(alternating leastSQR)和随机梯度下降(SGD)。
而在 自适应提升和梯度提升(Adaptive/Gradient Boosting)中,使用的技巧是梯度下降法(functional gradient descent)的思路还获取假设函数 g t g_t gt 的。
相对来说在 k 邻近算法中,则使用的是一种 lazy learning,什么意思呢?在训练过程中不做什么事情,而在测试过程中,拿已有的数据做一些推论。
提取模型的优缺(Pros and Cons of Extraction Models)
提取模型(Neural Network/Deep Learning、RBF Network 、Matrix Factorization)的优缺点如下:
优点:
- easy: reduces human burden in designing features
简单:减小了设计特征的人力负担 - powerful : if enough hidden variables considered
强有力:如果考虑足够多的隐变量的话
缺点
- hard: non-convex optimization problems in general
困难:通常是非凸优化问题 - overfitting: needs proper regularization/validation
过拟合:由于很有力,所以要合理使用正则化和验证工具
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!