OUC23暑期培训——深度学习基础【第四周】
目录
第一部分 代码实现
1.1数据准备,并引入基本函数库
1.2 定义 HybridSN 类
1.3 创建数据集
1.4 开始训练
1.5 模型测试和备用函数
第二部分 问题思考
第一部分 代码实现
本次代码实现了混合网络解决高光谱图像分类问题,均在Colab中完成。
1.1数据准备,并引入基本函数库
准备之前,由于一直下载不了数据,这里对python版本进了一个改动并且把wget的版本进行了一个更新
!apt-get install python3.6
!wget https://ftp.gnu.org/gnu/wget/wget-1.21.1.tar.gz
!tar -xzf wget-1.21.1.tar.gz
!sudo apt-get install libgnutls28-dev
!cd wget-1.21.1 && ./configure && make && make install取得Indian_pines相关数据
! wget http://www.ehu.eus/ccwintco/uploads/6/67/Indian_pines_corrected.mat
! wget http://www.ehu.eus/ccwintco/uploads/c/c4/Indian_pines_gt.mat
! pip install spectral引入基本函数库
##引入基本函数库import numpy as np
import matplotlib.pyplot as plt
import scipy.io as sio
from sklearn.decomposition import PCA
from sklearn.model_selection import train_test_split
from sklearn.metrics import confusion_matrix, accuracy_score, classification_report, cohen_kappa_score
import spectral
import torch
import torchvision
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim1.2 定义 HybridSN 类
根据《HybridSN: Exploring 3-D–2-DCNN Feature Hierarchy for Hyperspectral Image Classification》论文内容,定义相关HybridSN类
##定义 HybridSN 类class_num = 16class HybridSN(nn.Module):def __init__(self, num_classes=16):super(HybridSN, self).__init__()# conv1:(1, 30, 25, 25), 8个 7x3x3 的卷积核 ==>(8, 24, 23, 23)self.conv1 = nn.Conv3d(1, 8, (7, 3, 3))# conv2:(8, 24, 23, 23), 16个 5x3x3 的卷积核 ==>(16, 20, 21, 21)self.conv2 = nn.Conv3d(8, 16, (5, 3, 3))# conv3:(16, 20, 21, 21),32个 3x3x3 的卷积核 ==>(32, 18, 19, 19)self.conv3 = nn.Conv3d(16, 32, (3, 3, 3))# conv3_2d (576, 19, 19),64个 3x3 的卷积核 ==>((64, 17, 17)self.conv3_2d = nn.Conv2d(576, 64, (3,3))# 全连接层(256个节点)self.dense1 = nn.Linear(18496,256)# 全连接层(128个节点)self.dense2 = nn.Linear(256,128)# 最终输出层(16个节点)self.out = nn.Linear(128, num_classes)# Dropout(0.4)self.drop = nn.Dropout(p=0.4)#######################这里是优化的方向(一会还会添加注意力机制)#######################软最大化self.soft = nn.LogSoftmax(dim=1)#self.soft = nn.Softmax(dim=1)#加入BN归一化数据self.bn1=nn.BatchNorm3d(8)self.bn2=nn.BatchNorm3d(16)self.bn3=nn.BatchNorm3d(32)self.bn4=nn.BatchNorm2d(64)# 激活函数ReLUself.relu = nn.ReLU()###########################################定义完了各个模块,记得在这里调用执行:def forward(self, x):out = self.relu(self.conv1(x))#out = self.bn1(out)#BN层out = self.relu(self.conv2(out))#out = self.bn2(out)#BN层out = self.relu(self.conv3(out))#out = self.bn3(out)#BN层out = out.view(-1, out.shape[1] * out.shape[2], out.shape[3], out.shape[4])# 进行二维卷积,因此把前面的 32*18 reshape 一下,得到 (576, 19, 19)#out = self.attention(out)#调用注意力机制out = self.relu(self.conv3_2d(out))#out = self.bn4(out)#BN层# flatten 操作,变为 18496 维的向量,out = out.view(out.size(0), -1)out = self.dense1(out)out = self.drop(out)out = self.dense2(out)out = self.drop(out)out = self.out(out)out = self.soft(out)return out1.3 创建数据集
首先对高光谱数据实施PCA降维;然后创建 keras 方便处理的数据格式;然后随机抽取 10% 数据做为训练集,剩余的做为测试集。
首先定义基本函数:
# 对高光谱数据 X 应用 PCA 变换
def applyPCA(X, numComponents):newX = np.reshape(X, (-1, X.shape[2]))pca = PCA(n_components=numComponents, whiten=True)newX = pca.fit_transform(newX)newX = np.reshape(newX, (X.shape[0], X.shape[1], numComponents))return newX# 对单个像素周围提取 patch 时,边缘像素就无法取了,因此,给这部分像素进行 padding 操作
def padWithZeros(X, margin=2):newX = np.zeros((X.shape[0] + 2 * margin, X.shape[1] + 2* margin, X.shape[2]))x_offset = marginy_offset = marginnewX[x_offset:X.shape[0] + x_offset, y_offset:X.shape[1] + y_offset, :] = Xreturn newX# 在每个像素周围提取 patch ,然后创建成符合 keras 处理的格式
def createImageCubes(X, y, windowSize=5, removeZeroLabels = True):# 给 X 做 paddingmargin = int((windowSize - 1) / 2)zeroPaddedX = padWithZeros(X, margin=margin)# split patchespatchesData = np.zeros((X.shape[0] * X.shape[1], windowSize, windowSize, X.shape[2]))patchesLabels = np.zeros((X.shape[0] * X.shape[1]))patchIndex = 0for r in range(margin, zeroPaddedX.shape[0] - margin):for c in range(margin, zeroPaddedX.shape[1] - margin):patch = zeroPaddedX[r - margin:r + margin + 1, c - margin:c + margin + 1] patchesData[patchIndex, :, :, :] = patchpatchesLabels[patchIndex] = y[r-margin, c-margin]patchIndex = patchIndex + 1if removeZeroLabels:patchesData = patchesData[patchesLabels>0,:,:,:]patchesLabels = patchesLabels[patchesLabels>0]patchesLabels -= 1return patchesData, patchesLabelsdef splitTrainTestSet(X, y, testRatio, randomState=345):X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=testRatio, random_state=randomState, stratify=y)return X_train, X_test, y_train, y_test下面读取并创建数据集:
# 地物类别
class_num = 16
X = sio.loadmat('Indian_pines_corrected.mat')['indian_pines_corrected']
y = sio.loadmat('Indian_pines_gt.mat')['indian_pines_gt']# 用于测试样本的比例
test_ratio = 0.90
# 每个像素周围提取 patch 的尺寸
patch_size = 25
# 使用 PCA 降维,得到主成分的数量
pca_components = 30print('Hyperspectral data shape: ', X.shape)
print('Label shape: ', y.shape)print('\n... ... PCA tranformation ... ...')
X_pca = applyPCA(X, numComponents=pca_components)
print('Data shape after PCA: ', X_pca.shape)print('\n... ... create data cubes ... ...')
X_pca, y = createImageCubes(X_pca, y, windowSize=patch_size)
print('Data cube X shape: ', X_pca.shape)
print('Data cube y shape: ', y.shape)print('\n... ... create train & test data ... ...')
Xtrain, Xtest, ytrain, ytest = splitTrainTestSet(X_pca, y, test_ratio)
print('Xtrain shape: ', Xtrain.shape)
print('Xtest shape: ', Xtest.shape)# 改变 Xtrain, Ytrain 的形状,以符合 keras 的要求
Xtrain = Xtrain.reshape(-1, patch_size, patch_size, pca_components, 1)
Xtest = Xtest.reshape(-1, patch_size, patch_size, pca_components, 1)
print('before transpose: Xtrain shape: ', Xtrain.shape)
print('before transpose: Xtest shape: ', Xtest.shape) # 为了适应 pytorch 结构,数据要做 transpose
Xtrain = Xtrain.transpose(0, 4, 3, 1, 2)
Xtest = Xtest.transpose(0, 4, 3, 1, 2)
print('after transpose: Xtrain shape: ', Xtrain.shape)
print('after transpose: Xtest shape: ', Xtest.shape) """ Training dataset"""
class TrainDS(torch.utils.data.Dataset): def __init__(self):self.len = Xtrain.shape[0]self.x_data = torch.FloatTensor(Xtrain)self.y_data = torch.LongTensor(ytrain) def __getitem__(self, index):# 根据索引返回数据和对应的标签return self.x_data[index], self.y_data[index]def __len__(self): # 返回文件数据的数目return self.len""" Testing dataset"""
class TestDS(torch.utils.data.Dataset): def __init__(self):self.len = Xtest.shape[0]self.x_data = torch.FloatTensor(Xtest)self.y_data = torch.LongTensor(ytest)def __getitem__(self, index):# 根据索引返回数据和对应的标签return self.x_data[index], self.y_data[index]def __len__(self): # 返回文件数据的数目return self.len# 创建 trainloader 和 testloader
trainset = TrainDS()
testset = TestDS()
train_loader = torch.utils.data.DataLoader(dataset=trainset, batch_size=128, shuffle=True, num_workers=2)
test_loader = torch.utils.data.DataLoader(dataset=testset, batch_size=128, shuffle=False, num_workers=2)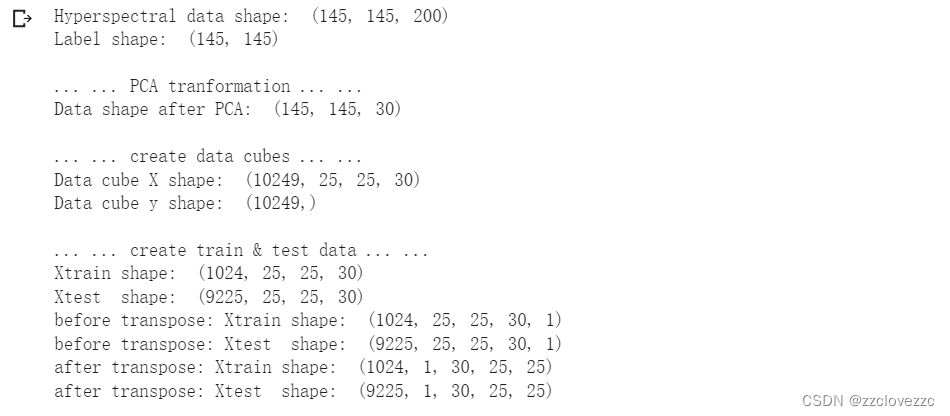
1.4 开始训练
# 使用GPU训练,可以在菜单 "代码执行工具" -> "更改运行时类型" 里进行设置
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")# 网络放到GPU上
net = HybridSN().to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)# 开始训练
total_loss = 0
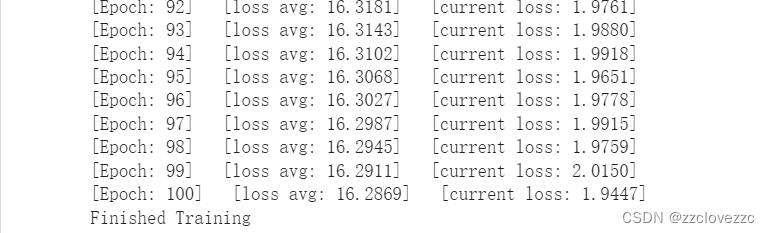
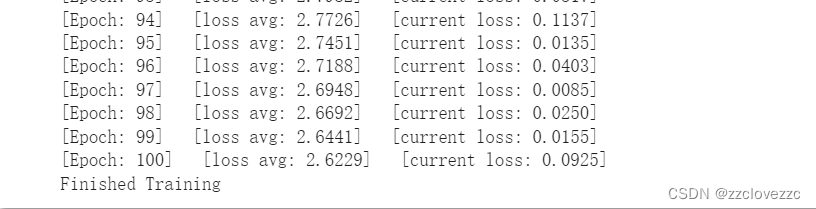
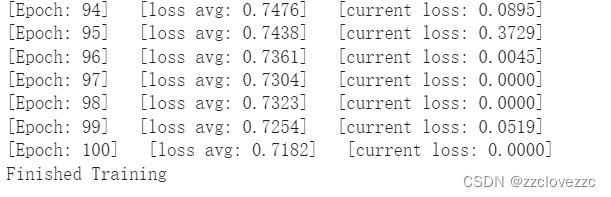
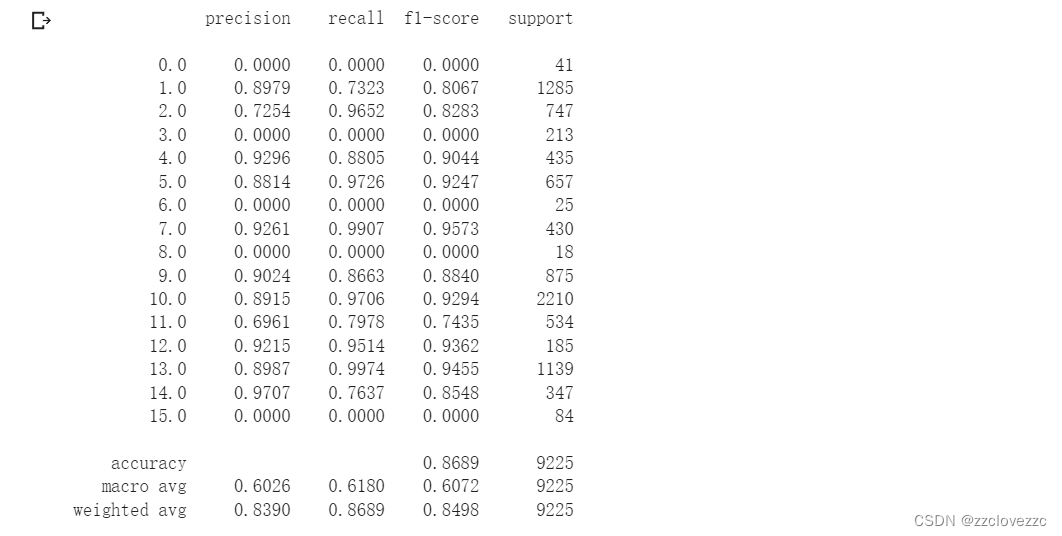
for epoch in range(100):for i, (inputs, labels) in enumerate(train_loader):inputs = inputs.to(device)labels = labels.to(device)# 优化器梯度归零optimizer.zero_grad()# 正向传播 + 反向传播 + 优化 outputs = net(inputs)loss = criterion(outputs, labels)loss.backward()optimizer.step()total_loss += loss.item()print('[Epoch: %d] [loss avg: %.4f] [current loss: %.4f]' %(epoch + 1, total_loss/(epoch+1), loss.item()))print('Finished Training')训练了100个epoch,部分结果如下图所示
SoftMax
LogSoftmax
LogSoftmax+BN
1.5 模型测试和备用函数
模型测试:
count = 0
# 模型测试
for inputs, _ in test_loader:inputs = inputs.to(device)outputs = net(inputs)outputs = np.argmax(outputs.detach().cpu().numpy(), axis=1)if count == 0:y_pred_test = outputscount = 1else:y_pred_test = np.concatenate( (y_pred_test, outputs) )# 生成分类报告
classification = classification_report(ytest, y_pred_test, digits=4)
print(classification)下面是用于计算各个类准确率,显示结果的备用函数
from operator import truedivdef AA_andEachClassAccuracy(confusion_matrix):counter = confusion_matrix.shape[0]list_diag = np.diag(confusion_matrix)list_raw_sum = np.sum(confusion_matrix, axis=1)each_acc = np.nan_to_num(truediv(list_diag, list_raw_sum))average_acc = np.mean(each_acc)return each_acc, average_accdef reports (test_loader, y_test, name):count = 0# 模型测试for inputs, _ in test_loader:inputs = inputs.to(device)outputs = net(inputs)outputs = np.argmax(outputs.detach().cpu().numpy(), axis=1)if count == 0:y_pred = outputscount = 1else:y_pred = np.concatenate( (y_pred, outputs) )if name == 'IP':target_names = ['Alfalfa', 'Corn-notill', 'Corn-mintill', 'Corn','Grass-pasture', 'Grass-trees', 'Grass-pasture-mowed','Hay-windrowed', 'Oats', 'Soybean-notill', 'Soybean-mintill','Soybean-clean', 'Wheat', 'Woods', 'Buildings-Grass-Trees-Drives','Stone-Steel-Towers']elif name == 'SA':target_names = ['Brocoli_green_weeds_1','Brocoli_green_weeds_2','Fallow','Fallow_rough_plow','Fallow_smooth','Stubble','Celery','Grapes_untrained','Soil_vinyard_develop','Corn_senesced_green_weeds','Lettuce_romaine_4wk','Lettuce_romaine_5wk','Lettuce_romaine_6wk','Lettuce_romaine_7wk','Vinyard_untrained','Vinyard_vertical_trellis']elif name == 'PU':target_names = ['Asphalt','Meadows','Gravel','Trees', 'Painted metal sheets','Bare Soil','Bitumen','Self-Blocking Bricks','Shadows']classification = classification_report(y_test, y_pred, target_names=target_names)oa = accuracy_score(y_test, y_pred)confusion = confusion_matrix(y_test, y_pred)each_acc, aa = AA_andEachClassAccuracy(confusion)kappa = cohen_kappa_score(y_test, y_pred)return classification, confusion, oa*100, each_acc*100, aa*100, kappa*100
检测结果写在文件里:
classification, confusion, oa, each_acc, aa, kappa = reports(test_loader, ytest, 'IP')
classification = str(classification)
confusion = str(confusion)
file_name = "classification_report.txt"with open(file_name, 'w') as x_file:x_file.write('\n')x_file.write('{} Kappa accuracy (%)'.format(kappa))x_file.write('\n')x_file.write('{} Overall accuracy (%)'.format(oa))x_file.write('\n')x_file.write('{} Average accuracy (%)'.format(aa))x_file.write('\n')x_file.write('\n')x_file.write('{}'.format(classification))x_file.write('\n')x_file.write('{}'.format(confusion))下面代码用于显示分类结果:
# load the original image
X = sio.loadmat('Indian_pines_corrected.mat')['indian_pines_corrected']
y = sio.loadmat('Indian_pines_gt.mat')['indian_pines_gt']height = y.shape[0]
width = y.shape[1]X = applyPCA(X, numComponents= pca_components)
X = padWithZeros(X, patch_size//2)# 逐像素预测类别
outputs = np.zeros((height,width))
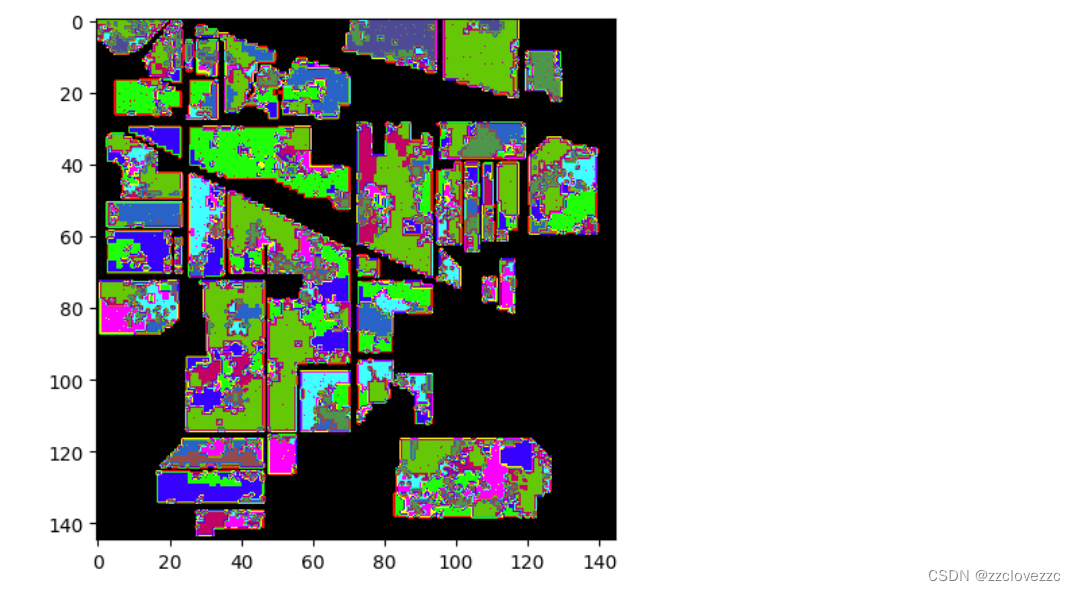
for i in range(height):for j in range(width):if int(y[i,j]) == 0:continueelse :image_patch = X[i:i+patch_size, j:j+patch_size, :]image_patch = image_patch.reshape(1,image_patch.shape[0],image_patch.shape[1], image_patch.shape[2], 1)X_test_image = torch.FloatTensor(image_patch.transpose(0, 4, 3, 1, 2)).to(device)prediction = net(X_test_image)prediction = np.argmax(prediction.detach().cpu().numpy(), axis=1)outputs[i][j] = prediction+1if i % 20 == 0:print('... ... row ', i, ' handling ... ...')predict_image = spectral.imshow(classes = outputs.astype(int),figsize =(5,5))分别进行了三组,SoftMax,LogSoftmax,LogSoftmax+BN,测试结果如下
SoftMax
LogSoftmax
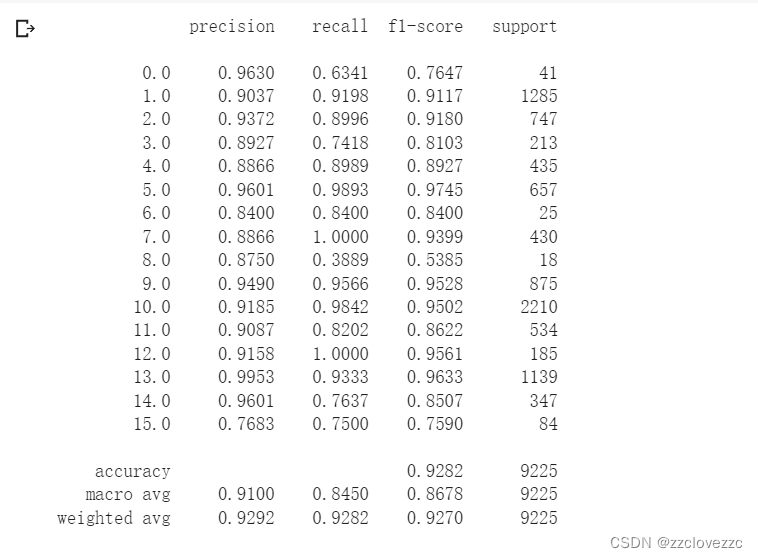
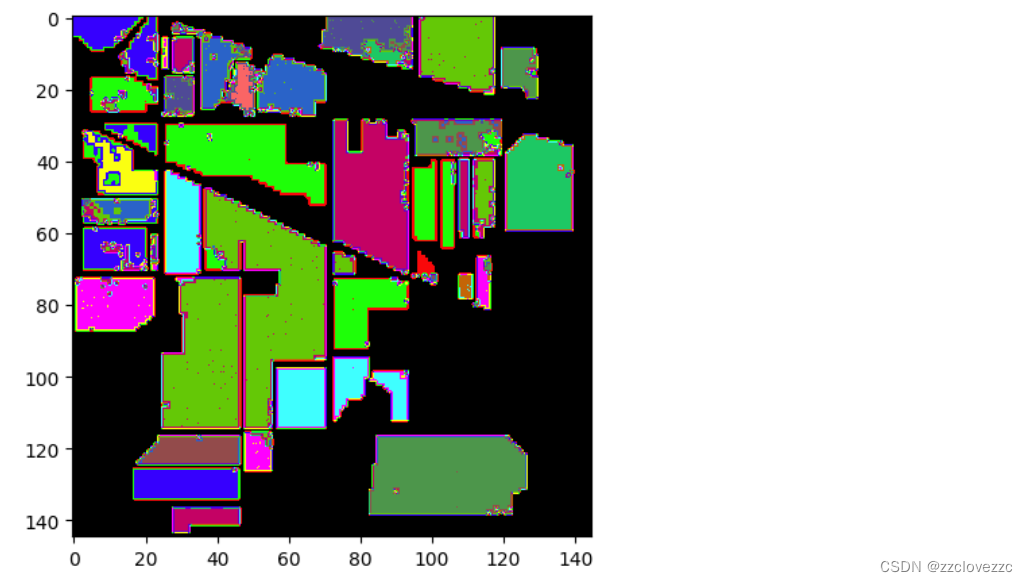
LogSoftmax+BN
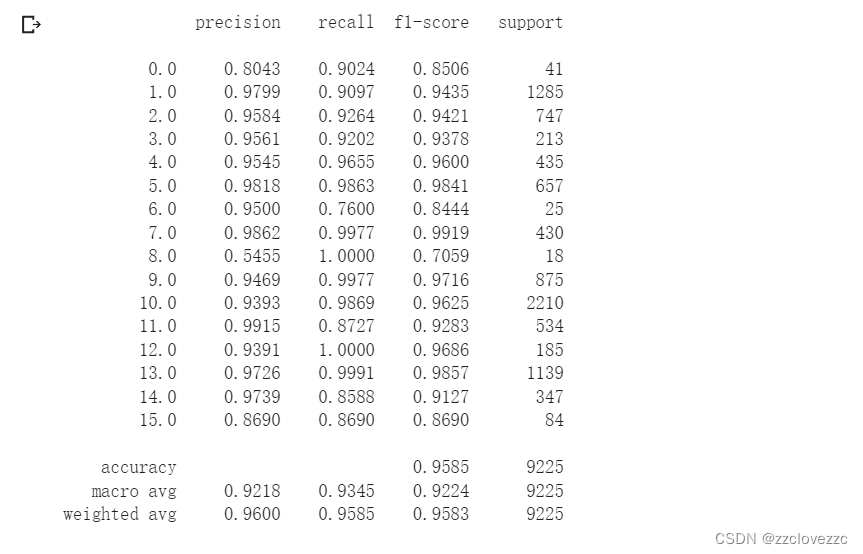

由实验结果可知使用logsoftmax代替softmax之后,效果显著提升,因为它能够解决函数overflow和underflow,加快运算速度,提高数据稳定性。BN对图像来说类似于一种对比度的拉伸,其色彩的分布都会被归一化,会破坏了图像原本的对比度信息,并且图像分类不需要保留图像的对比度信息,利用图像的结构信息就可以完成分类,所以Batch Norm反而降低了训练难度,甚至一些不明显的结构,在Batch Norm后也会被凸显出来(对比度被拉开了)。
第二部分 问题思考
1.3D卷积和2D卷积的区别
1)2D卷积和3D卷积的主要区别在于卷积核和输入数据的维度不同。2D卷积的卷积核和输入数据都是二维的,而3D卷积的卷积核和输入数据都是三维的。这意味着3D卷积可以同时考虑空间和时间(或深度)上的信息,而2D卷积只能考虑空间上的信息。
2)2D卷积和3D卷积的另一个区别在于计算量和参数量不同。由于3D卷积涉及更多的维度,因此它需要更多的计算资源和存储空间,也更容易导致过拟合。因此,在实际应用中,需要根据不同的任务和数据选择合适的卷积类型。
2.训练HybridSN,然后多测试几次,会发现每次分类的结果都不一样,请思考为什么?
1)HybridSN 模型使用了 Dropout 层,这是一种防止过拟合的技术,它会随机地在训练过程中失活一些神经元,从而减少模型对特定数据的依赖。
2) HybridSN 模型使用了随机初始化的权重参数,它会根据一定的分布或范围给每个参数赋予一个随机值。
3) HybridSN 模型使用了 Adam 优化器,这是一种基于梯度下降的优化算法,它会根据梯度的变化动态地调整学习率。每次训练时,模型的更新步长都会不同,导致最优解的寻找过程有所波动。
3.如果想要进一步提升高光谱图像的分类性能,可以如何改进?
1) 用更多的训练数据,或者使用数据增强技术,来增加模型的泛化能力和鲁棒性,从而减少过拟合和噪声的影响。
2) 用更合适的损失函数,例如交叉熵损失或者对比损失,来优化模型的分类性能,从而提高分类准确率和召回率。
4.depth-wise conv和分组卷积有什么区别与联系?
联系:
1)depth-wise conv 和分组卷积都是一种减少参数量和计算量的卷积方式,它们都是将输入的特征图按照通道进行分组,然后对每个组进行独立的卷积操作。
2)depth-wise conv 是一种特殊的分组卷积,它的分组数等于输入特征图的通道数,也就是每个通道单独进行卷积,而不与其他通道共享卷积核。
3)分组卷积和 depth-wise conv 都需要与 point-wise conv (即 1x1 的卷积)结合使用,以实现跨通道的信息融合和输出维度的调整。
区别:
1)分组卷积可以看作是通道稀疏连接的方式,它可以增加特征图之间的多样性和互补性,从而提高模型的表达能力。depth-wise conv 可以看作是空间和通道的完全分离,它可以捕捉每个通道内部的特征,从而提高模型的效率。
4.SENet 的注意力是不是可以加在空间位置上?
SENet 的注意力机制可以加在空间位置上,即对每个像素点或区域进行权重分配,从而增强感兴趣的区域,抑制背景噪声 。
5.在 ShuffleNet 中,通道的 shuffle 如何用代码实现?
只需要对特征图进行维度重排即可。假设将输入层分为 g 组,总通道数为 g × n,首先将通道那个维度拆分为 (g, n) 两个维度,然后将这两个维度转置变成 (n, g) ,最后重新 reshape 成一个维度 g×n
def channel_shuffle(x: Tensor, groups: int) -> Tensor:batch_size, num_channels, height, width = x.size()channels_per_group = num_channels // groups# reshape# [batch_size, num_channels, height, width] -> [batch_size, groups, channels_per_group, height, width]x = x.view(batch_size, groups, channels_per_group, height, width)x = torch.transpose(x, 1, 2).contiguous()# flattenx = x.view(batch_size, -1, height, width)return x本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!