self_driving系统
自动驾驶平台主要组成:高精度地图(HD Maps),定位(Localization),感知(Perception),预测(Prediction),规划(Planning),控制(Control).
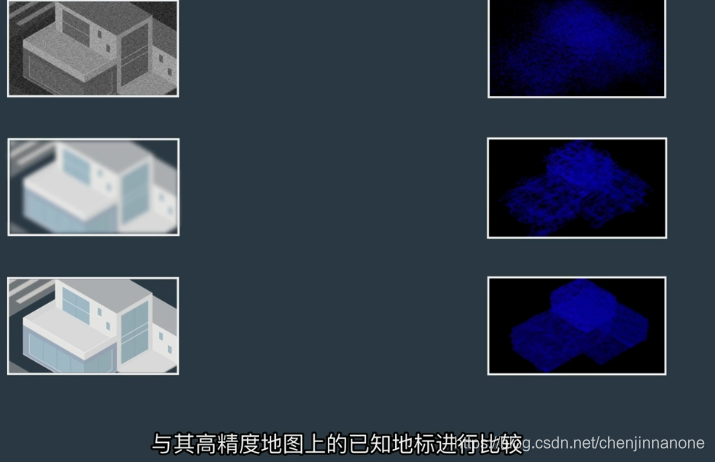
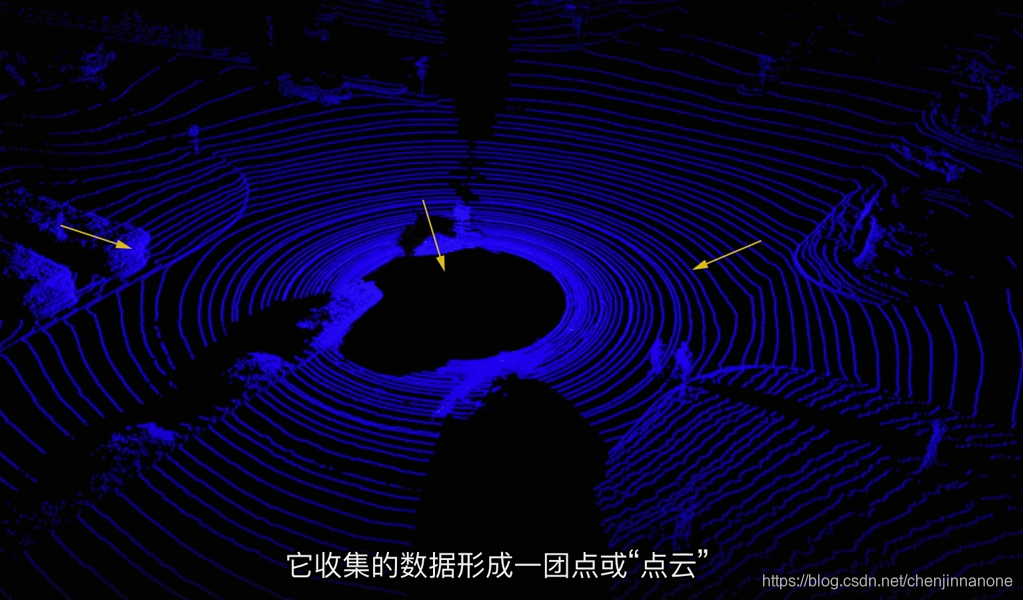
随笔:汽车利用激光和雷达数据,将这些传感器感知内容与高分辨率地图进行对比,这种对比能使汽车以个位数厘米级精度进行自定位.
L1:为驾驶员辅助 该等级为驾驶员提供加速或者转向支持
L2:部分自动化 车辆自动控制几项功能如自动巡航个车道保持
L3:有条件的自动化 车辆自主驾驶 但是驾驶员必须在必要时刻接管
L4:高度自动化 车辆个各方面不希驾驶员的参与 车辆可能不存在任何驾驶员控制设备 车辆或许需要地理围栏的限制
L5:完全自动化 不需要地理围栏 可以再任何区域自主运行
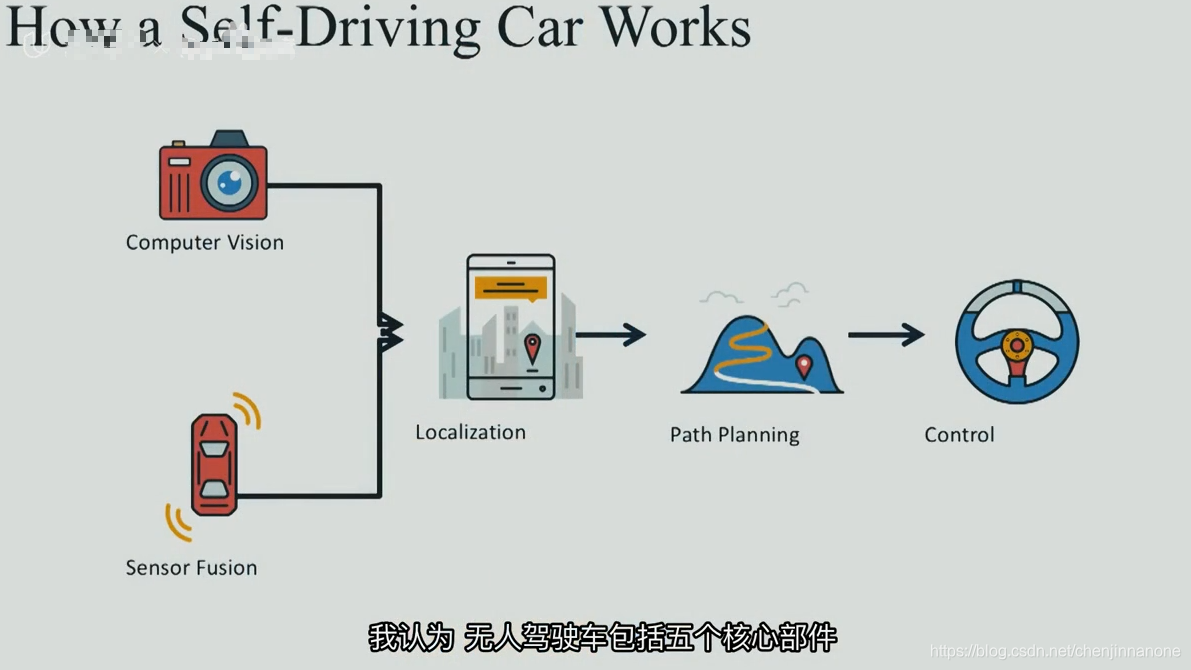
无人驾驶车包括五个核心部件:计算机视觉 传感器融合 定位 路径规划 控制
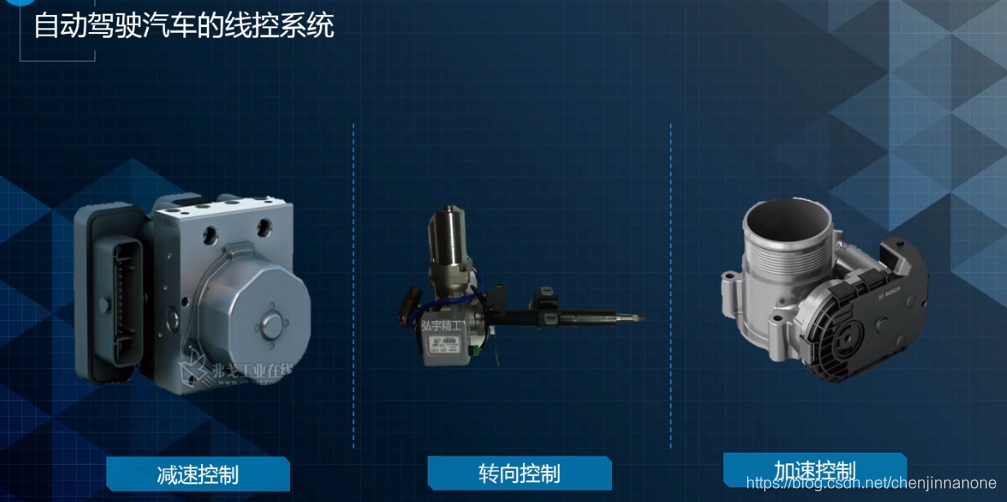
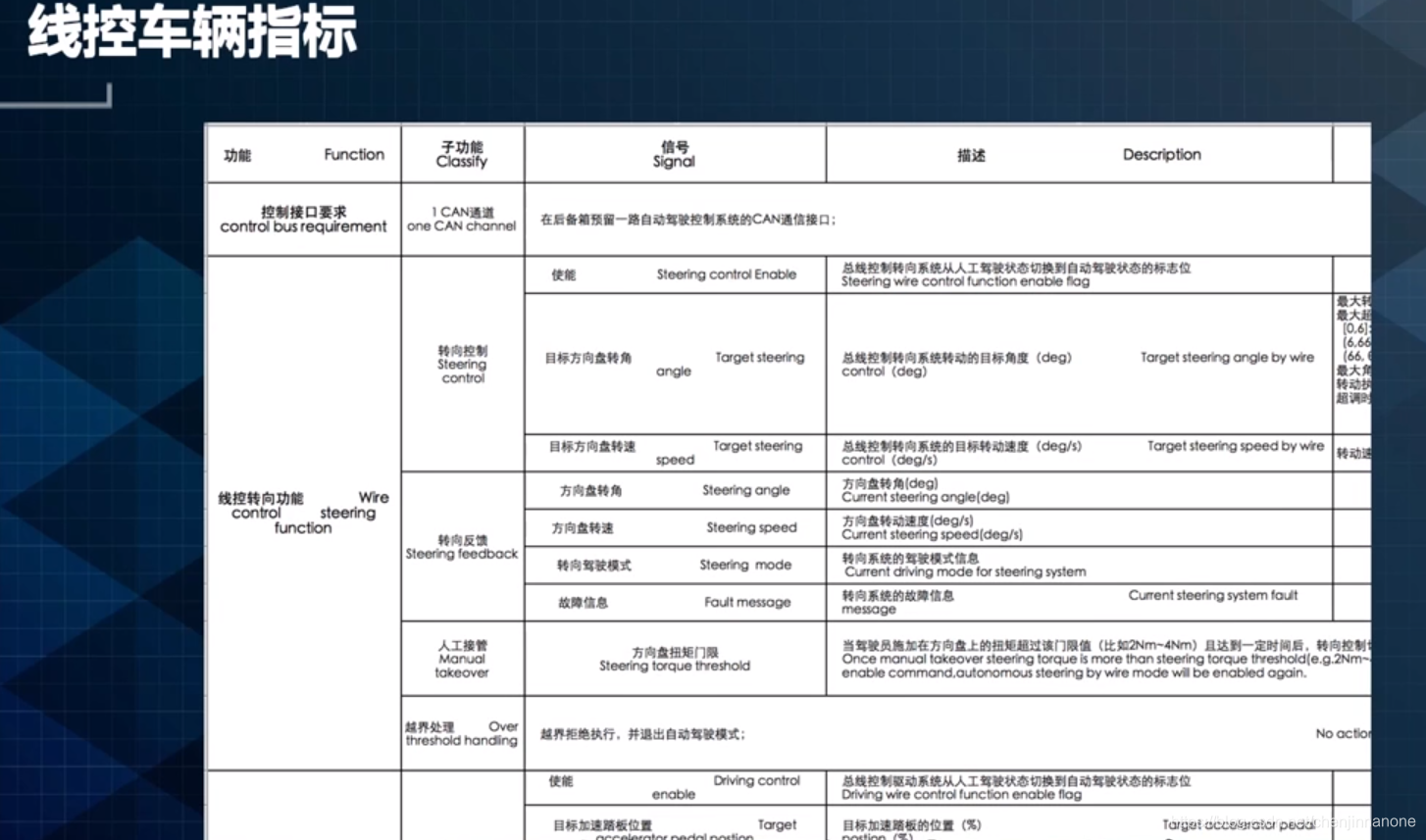
随笔:无人驾驶车辆也是线控驾驶车辆,,控制器区域网络(CAN)是车辆的内部通信网络.
计算机系统通过CAN卡连接汽车内部网络,发送加速,制动,和转向信号.
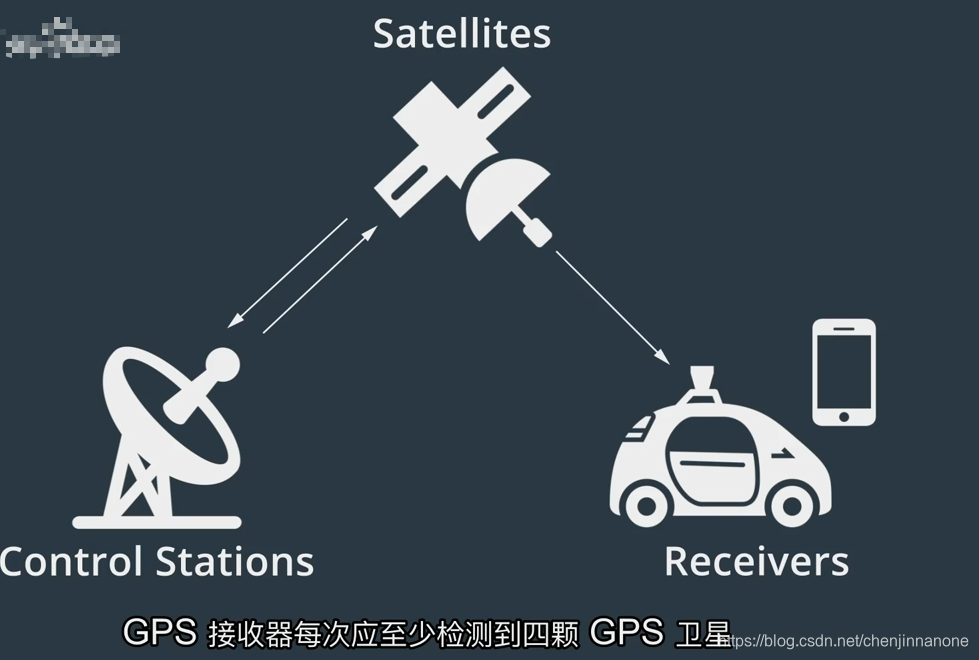
全球定位系统(GPS)帮助确定位置
惯性测量装置(IMU)测量观察车辆的运动和位置

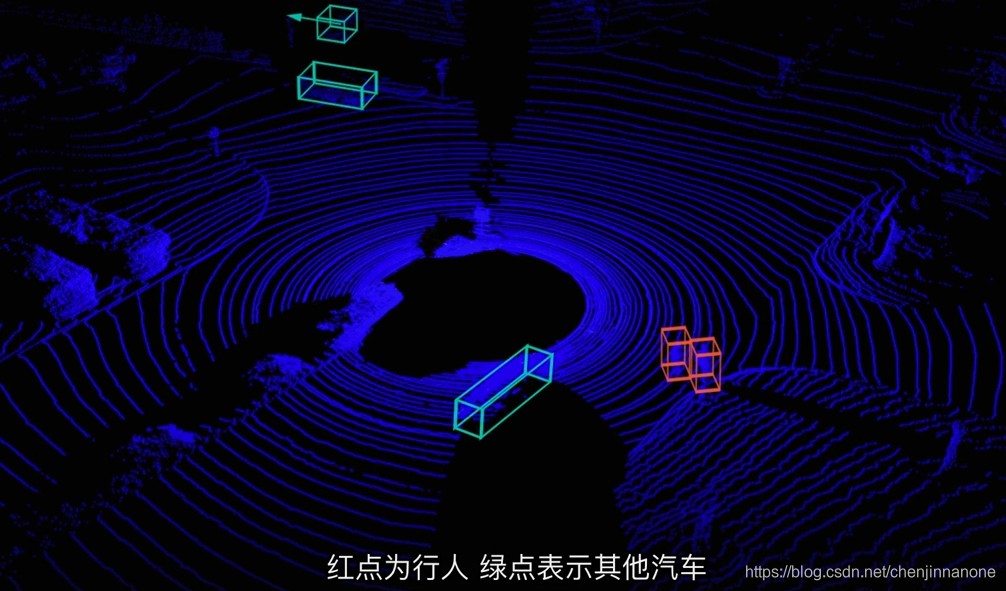
激光雷达(LIDAR)由一组脉冲激光器组成,车辆头顶的LIDAR可360度获取反射信息
摄像头捕获图像数据,计算机视觉获取并分析,例如可通过图像的颜色识别交通灯
雷达(RADAR)用于检测障碍物,分辨率低但经济实惠 擅长测量其他车辆的速度
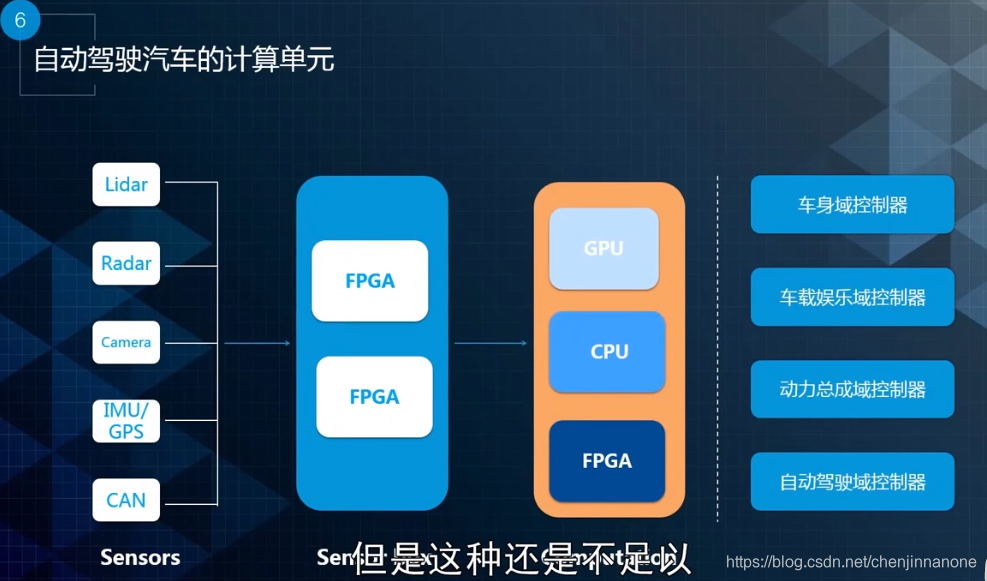
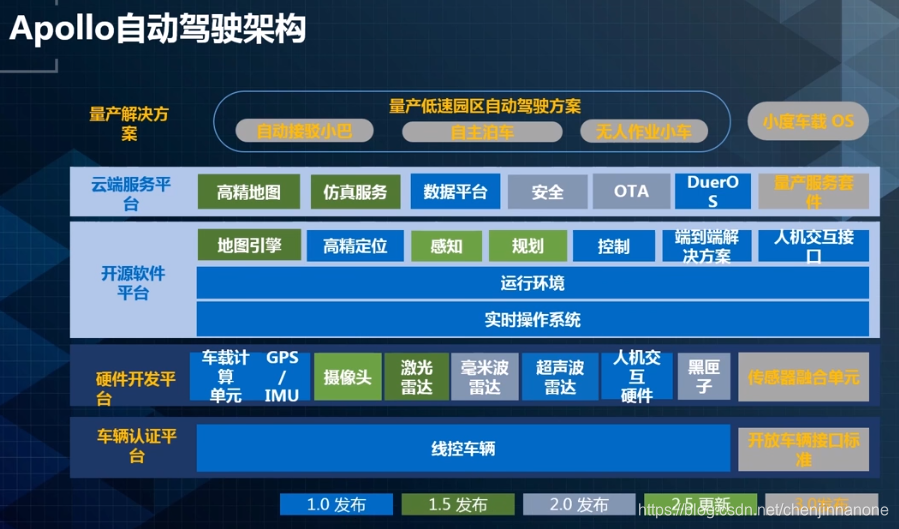
硬件平台组成:

开放式软件层包括:实时操作系统(RTOS) 运行时框架 应用程序模块层
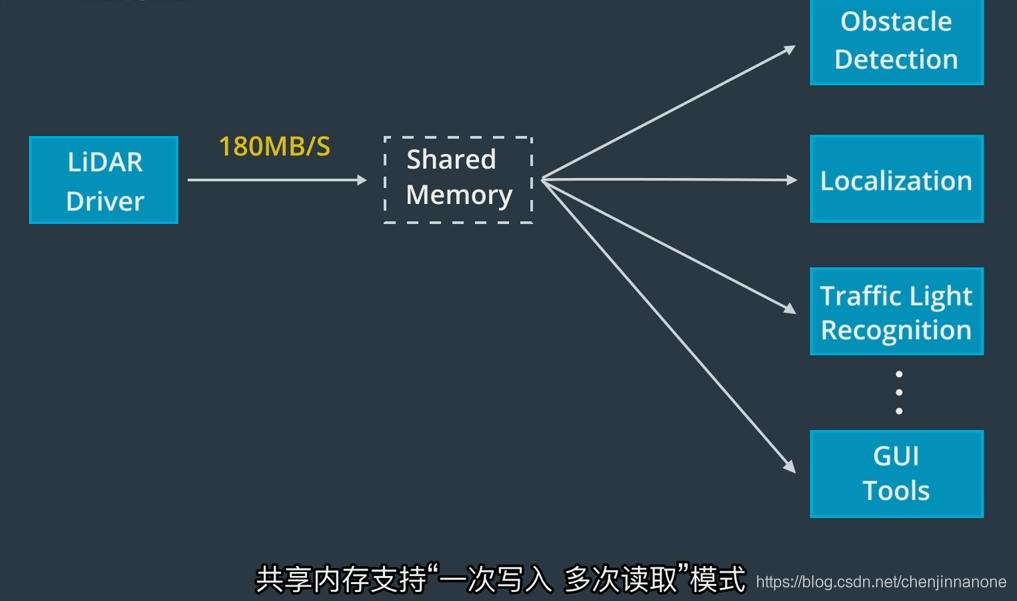
随笔:改进了共享内存的功能和性能,去中心化和数据兼容性
共享内存降低了需要访问不同模块时的数据复制需求,用于一对多传输方案
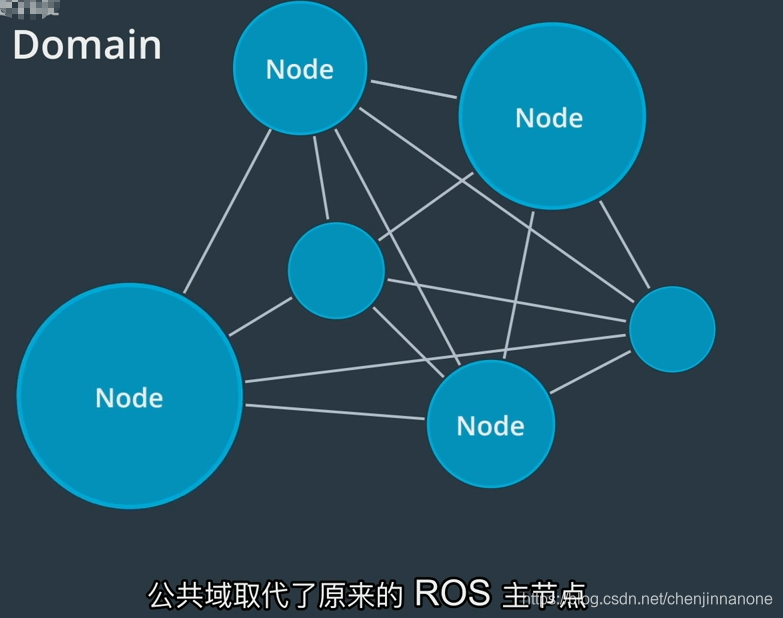
去中心化:
数据兼容性:Protobuf
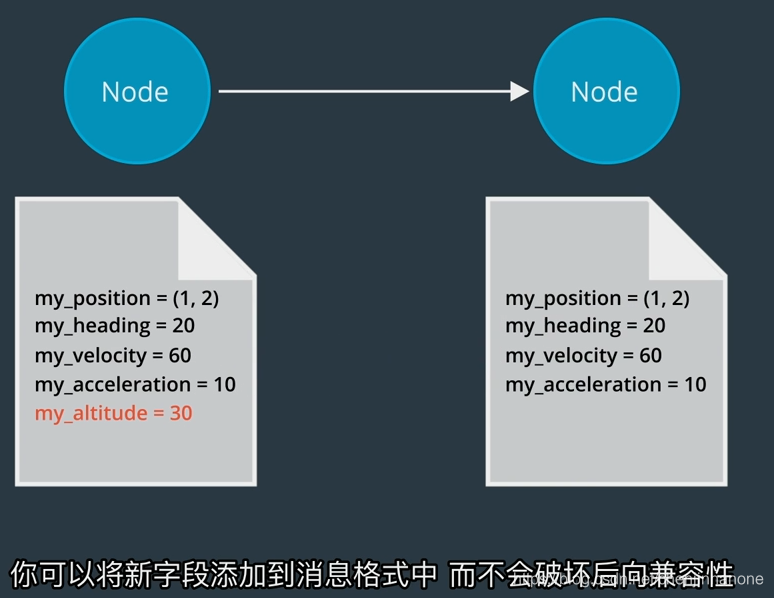
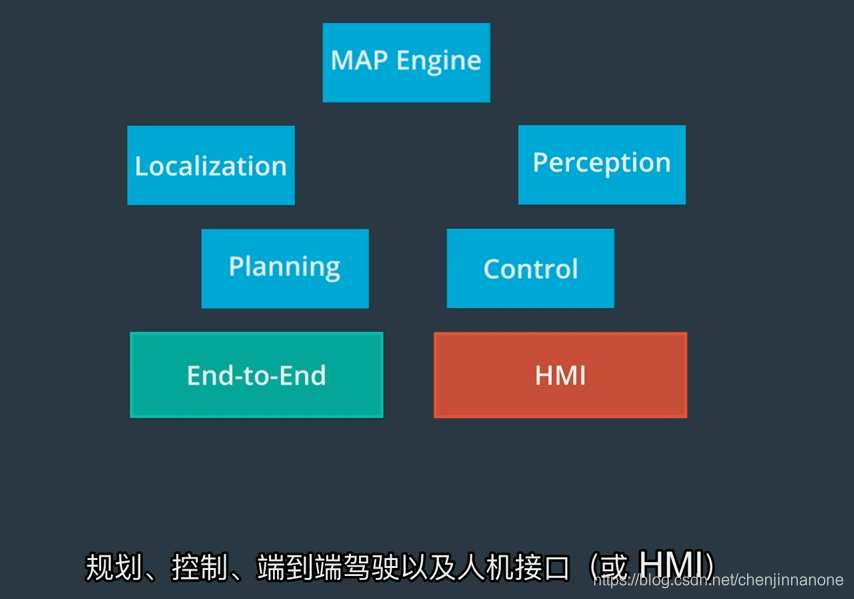
应用程序模块:MAP引擎 定位 感知 规划 控制 端到端驾驶 人机接口(HMI).
云服务:

传统地图误差在m级别 高精度地图误差在cm级 同时高进度地图能传递更多信息,三维特征 颜色等语义
定位:

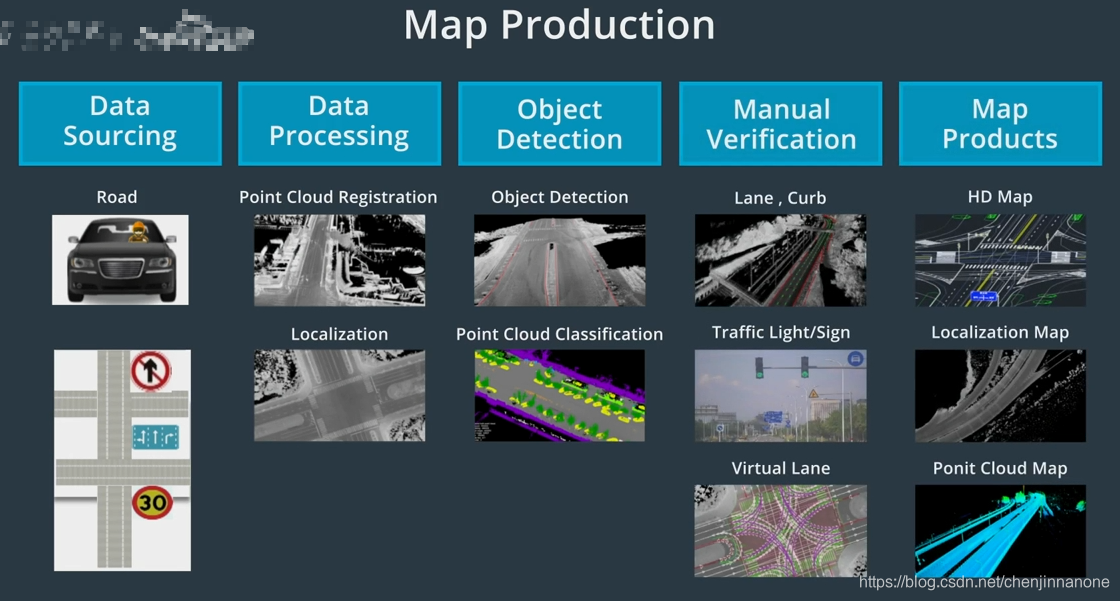
高精度地图的构建五个部分:数据采集 数据处理 对象检测 手动验证 地图发布



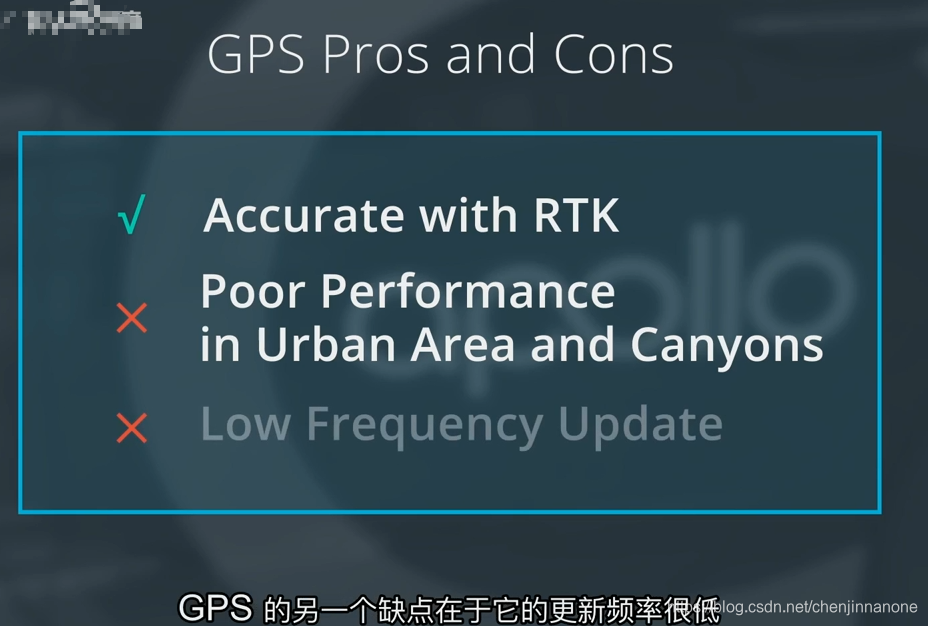
GPS是GNSS的一种:
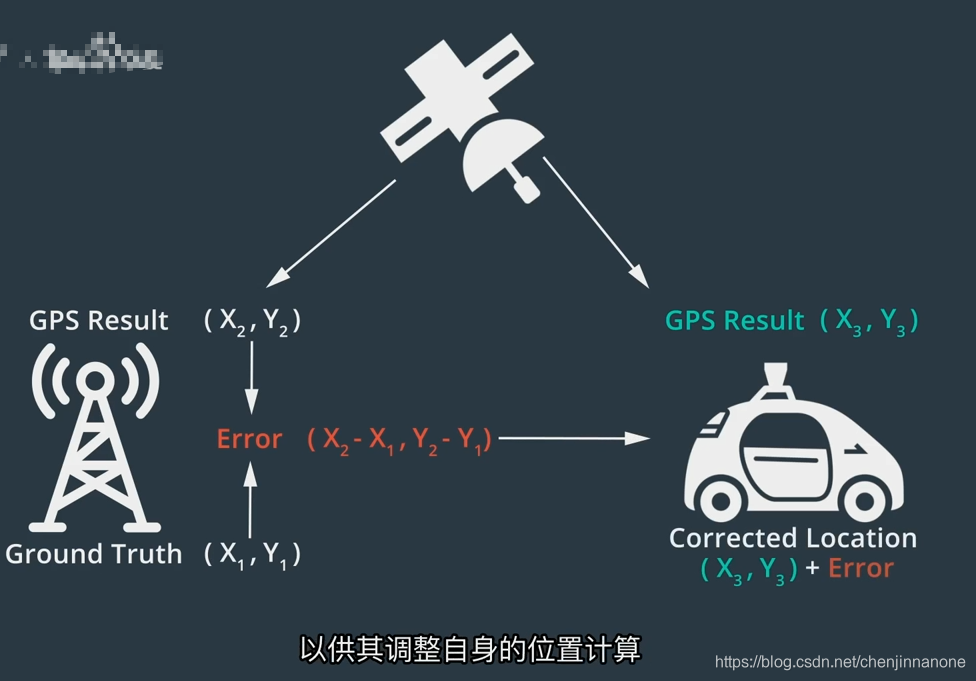
实时运动定位RTK:
IMU重要组成部分:加速度计和陀螺仪
IMU弥补GPS更新频率低的问题 GPU纠正IMU的运动误差
在GPS信号弱的地方 采用LIDAR与高精度地图匹配来定位
感知: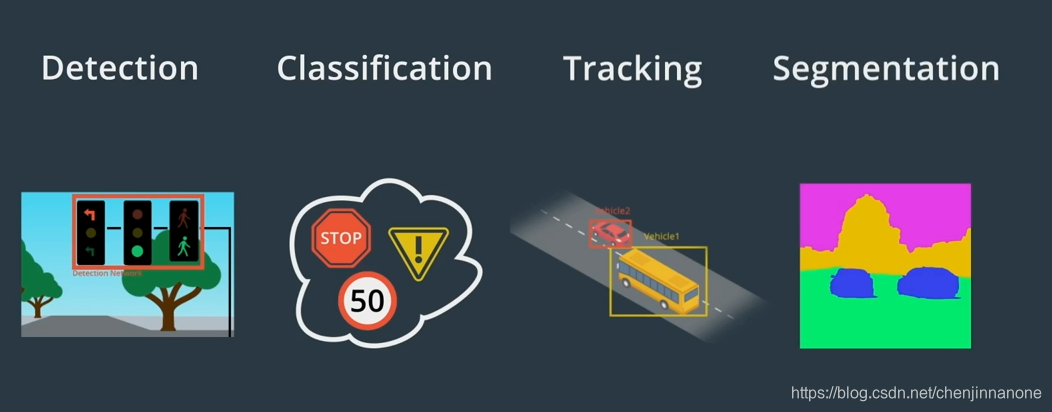
LIDAR:



本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!