ROS笔记之Gazebo机器人仿真(六)——机器人模型插件添加
1.引言
这章里我们将结束如何给机器人模型添加插件。
2.传感器插件
2.1激光雷达插件
(1)在urdf文件夹下的smartcar.urdf中添加:
0 0 0 0 0 0 false 40 720 1 -1.570796 1.570796 0.10 30.0 0.01 gaussian 0.0 0.01 /laser/scan base_link 这里对常需要修改的部分代码进行说明:
表示激光雷达的元件名称为"sensor_link"
/laser/scan
表示激光雷达数据的topic名称为“/laser/scan”
base_link
表示基架为“base_link”
(2)在两个终端分别输入指令:
roslaunch smartcar gazebo.launch
roslaunch smartcar display.launch
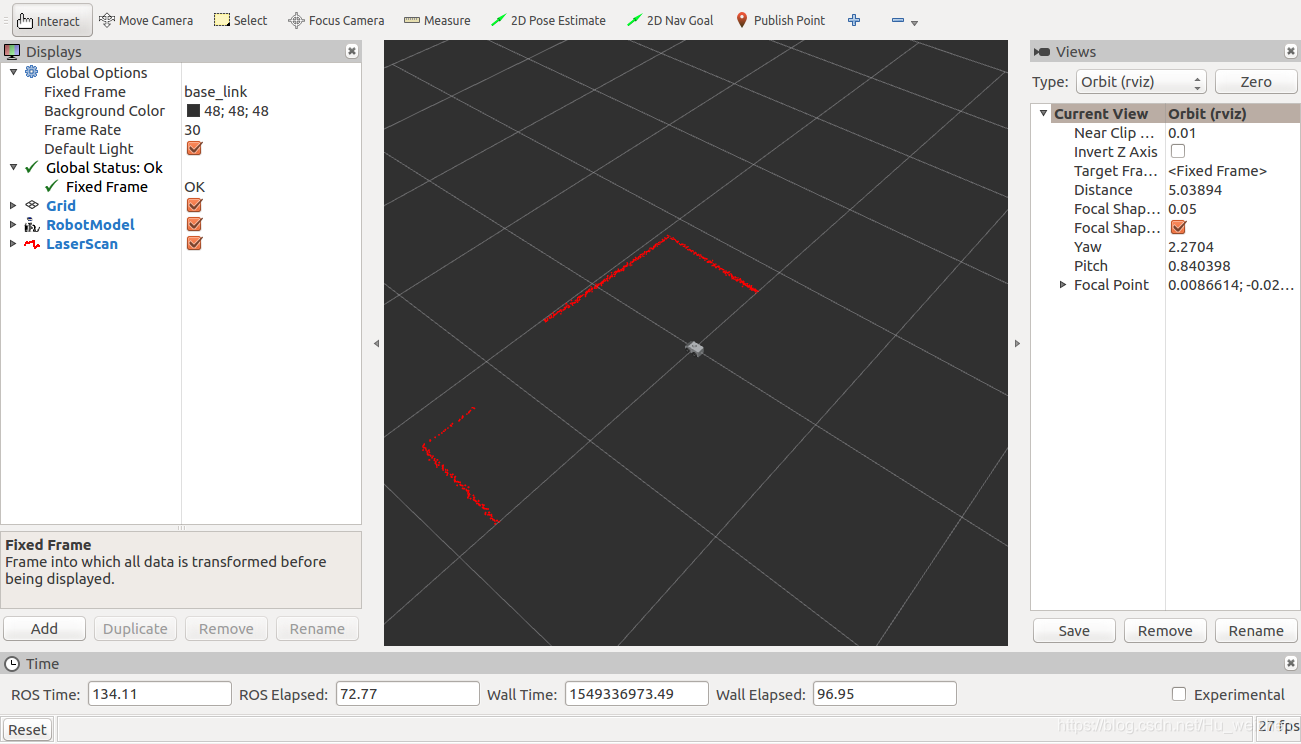
(3)在Rviz界面中添加显示激光雷达
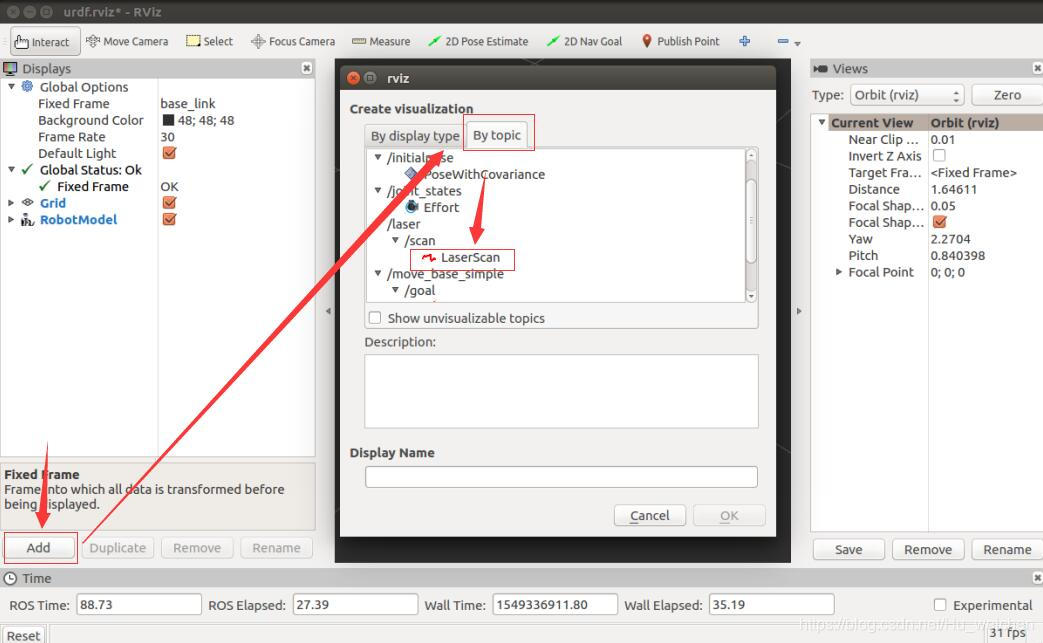
(4)可以看到添加的激光雷达插件产生的“/laser/scan”的Topic
2.2 RGB-D相机插件
我们可以将“sensor_link”定义为激光雷达也可以添加相应的插件将其定义为 RGB-D相机。
(1)在urdf文件夹下的smartcar.urdf中添加:
1 true 1.047 640 480 R8G8B8 0.1 100 true 5 kinect2 base_link qhd/image_color_rect qhd/image_depth_rect depth/points qhd/camera_info depth/camera_info 0.4 0.07 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0 (2)在两个终端分别输入指令:
roslaunch smartcar gazebo.launch
roslaunch smartcar display.launch
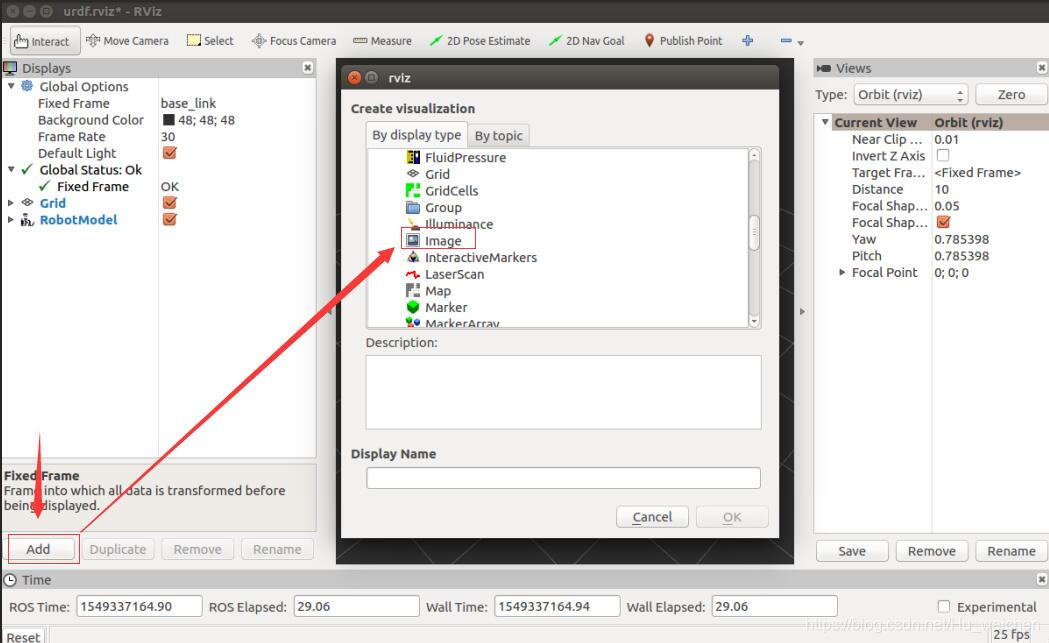
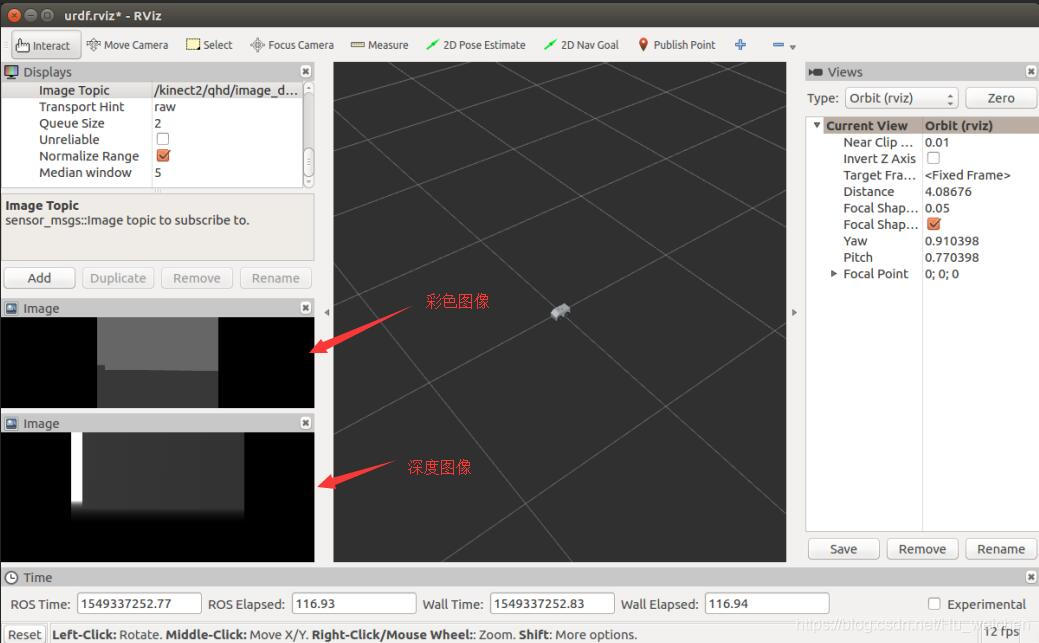
(3)在Rviz界面添加相应Topic就能看到深度图像和彩色图像
3.运动控制插件
为了能让机器人运动起来,我们还需要添加滑动转向驱动:
true 5 wheel1_joint wheel3_joint wheel2_joint wheel4_joint 0.060 0.040 20 cmd_vel odom odom base_link 1 想要添加更多Gazebo插件,可以看这里。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!