滑模原理框图
这几天又重新复习了滑模控制原理,借助相图来进行理解,有了更深刻的认识。
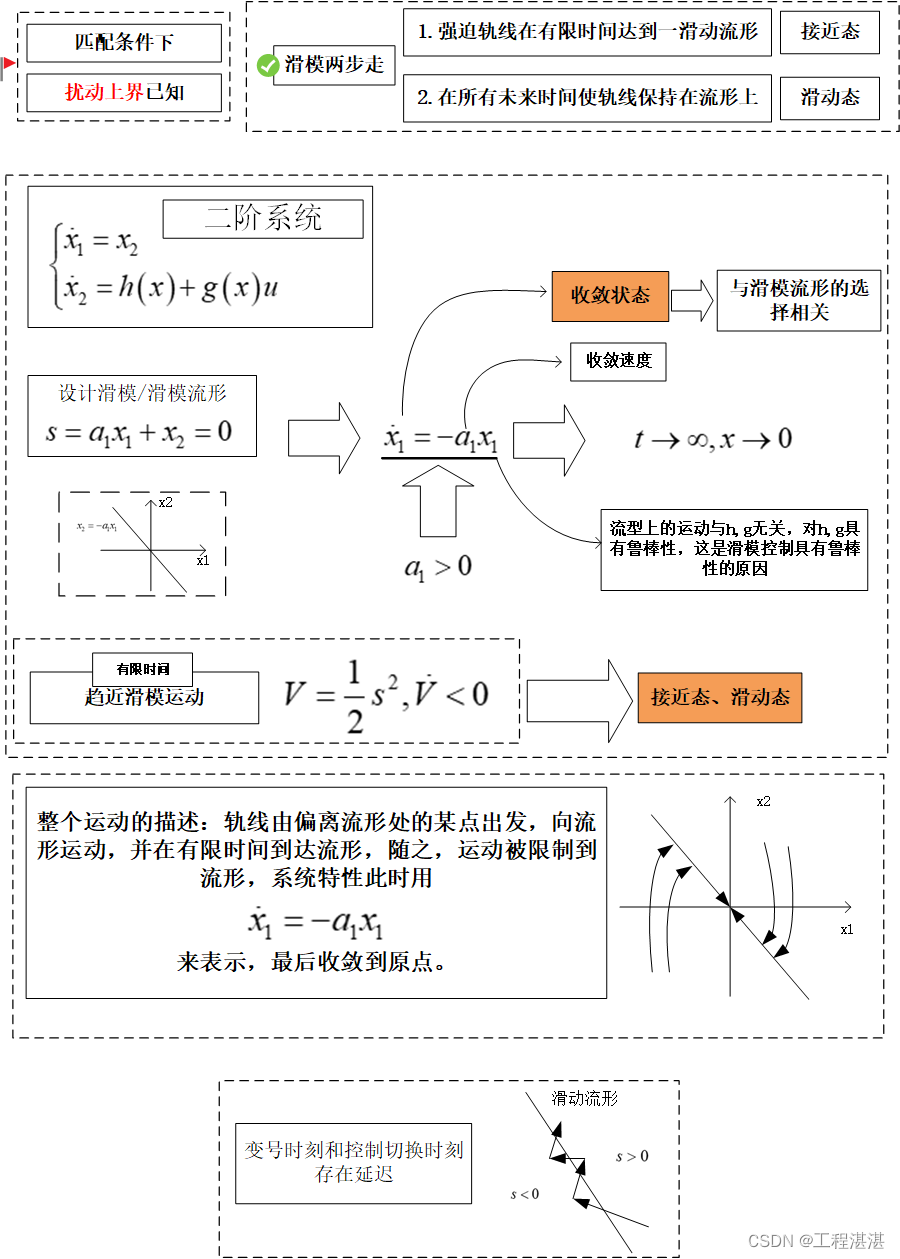
采用滑模控制要求系统是匹配条件下的,更重要的是系统的扰动上界需要是已知的,否则无法设置相应的切换增益用以抵抗干扰,这一点与滑模函数的选择息息相关:要求干扰项和滑模切换项两者中滑模切换项占据主导作用。
滑模函数主要分为两步:
(1)第一步:接近态
要求系统的运动轨线在有限的时间内达到事先设计的滑动流形;
(2)第二步:滑动态
在系统达到滑动流形后,在之后的时间内都始终保持在该流形上;
整个系统的描述为:轨线由偏离流形处的某点出发,项流形运动,并在有限时间内达到流形,随之,运动被限制到流形,系统特性此时可借助所设计的滑模函数来表示,最后收敛到原点。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!