STM32 GPS悬停飞控 (十三)遥控器
接下来是遥控器。
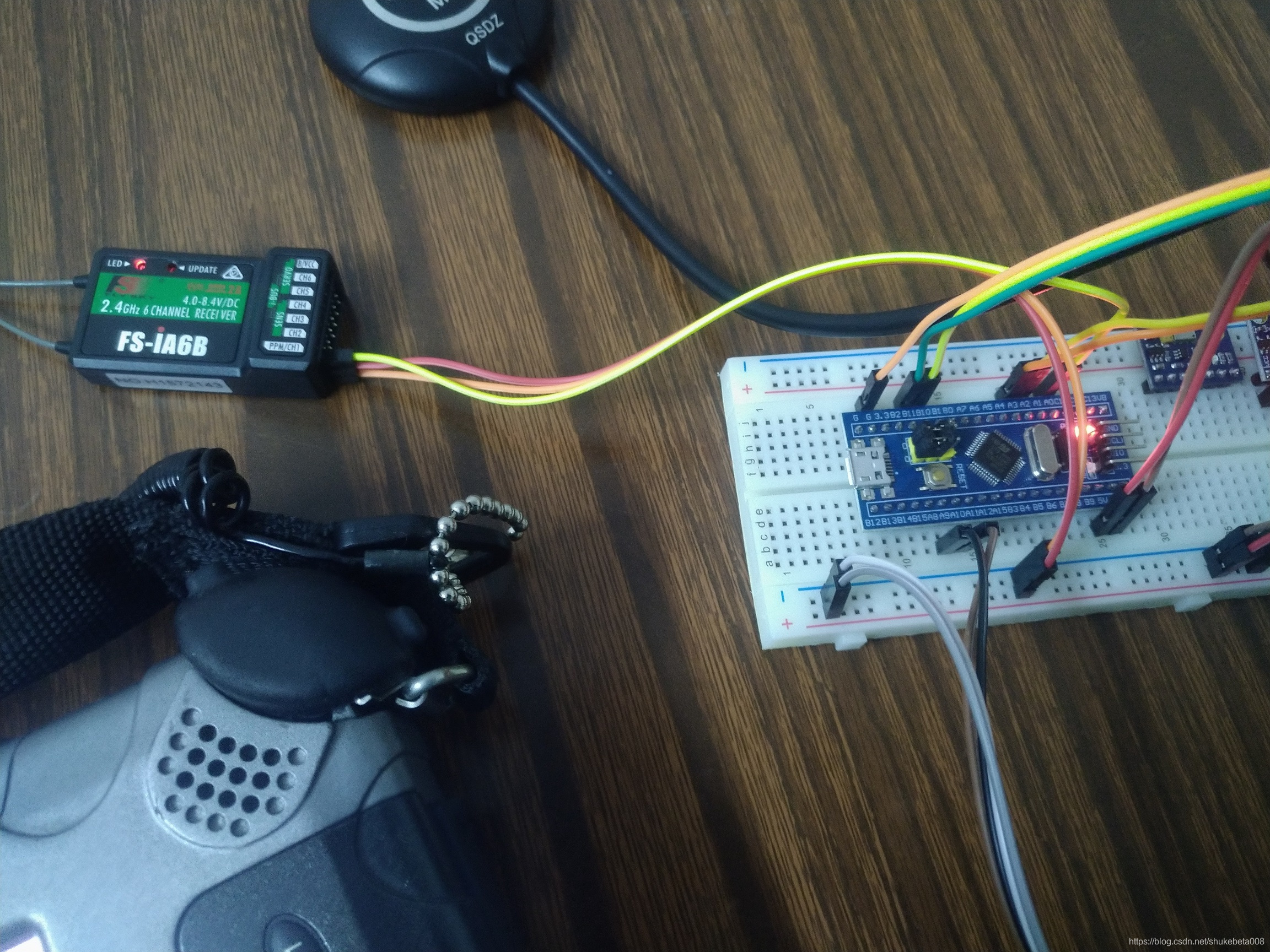
接收机ppm口从上到下是s + - 。按照这个顺序接入stm32。
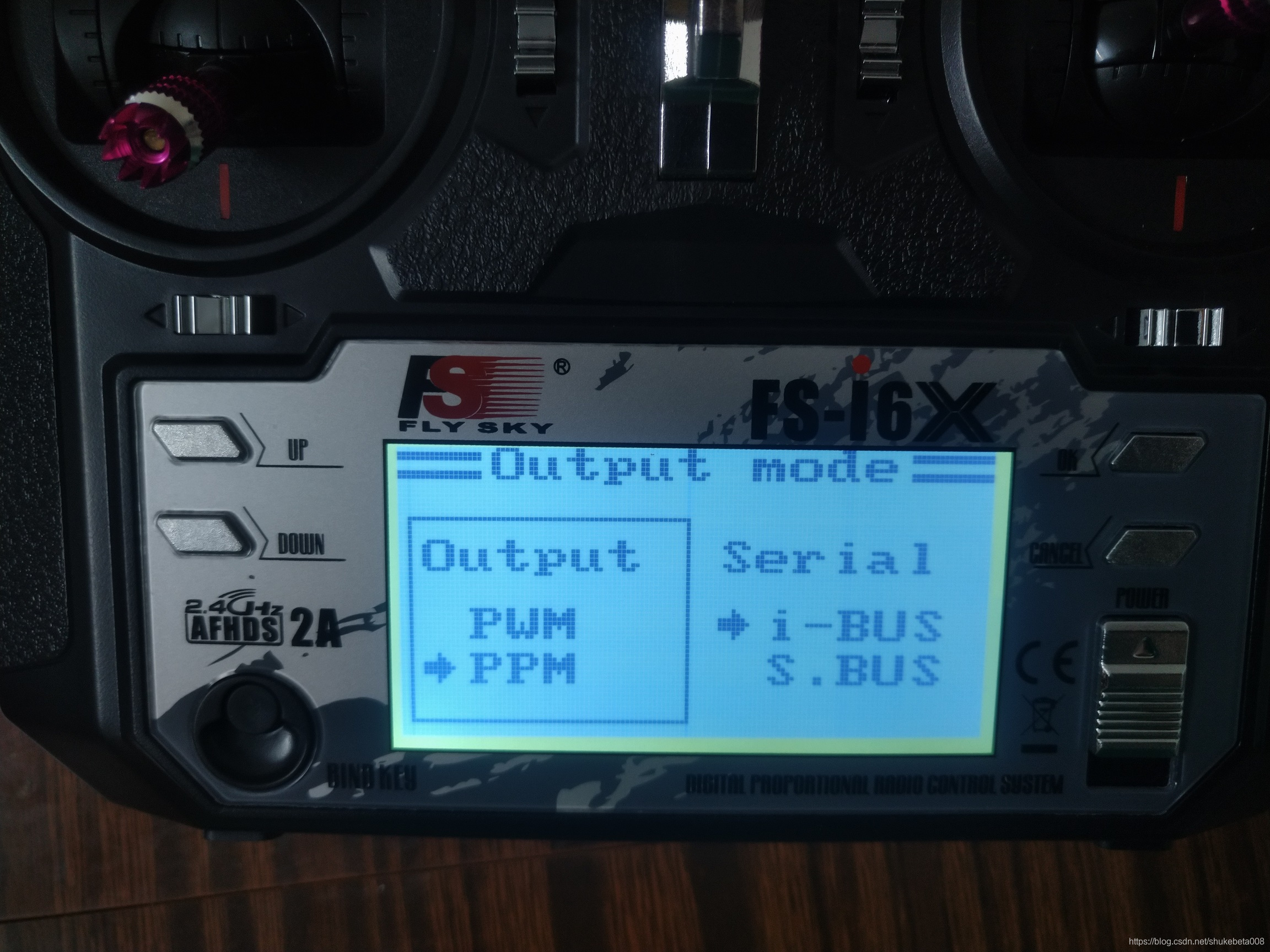
遥控器上要设置为ppm模式。system->RX setup->output mode里如下图设置。
另外,二通道要设置反向,function->reverse里。
然后前4个通道就好了,可以解锁,后两个开关还要研究下。
接下来设置后两个通道。
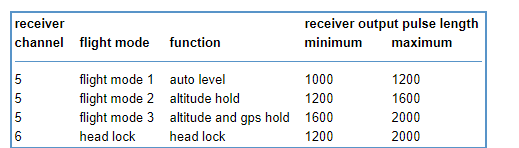
老外要求一个三档开关控制5通道,分别是1000左右,1500左右和2000左右,对应自动回正,定高,定高+悬停。
然后一个两档开关控制6通道,根据范围可以是1000和2000两档,对应正常模式和无头模式。
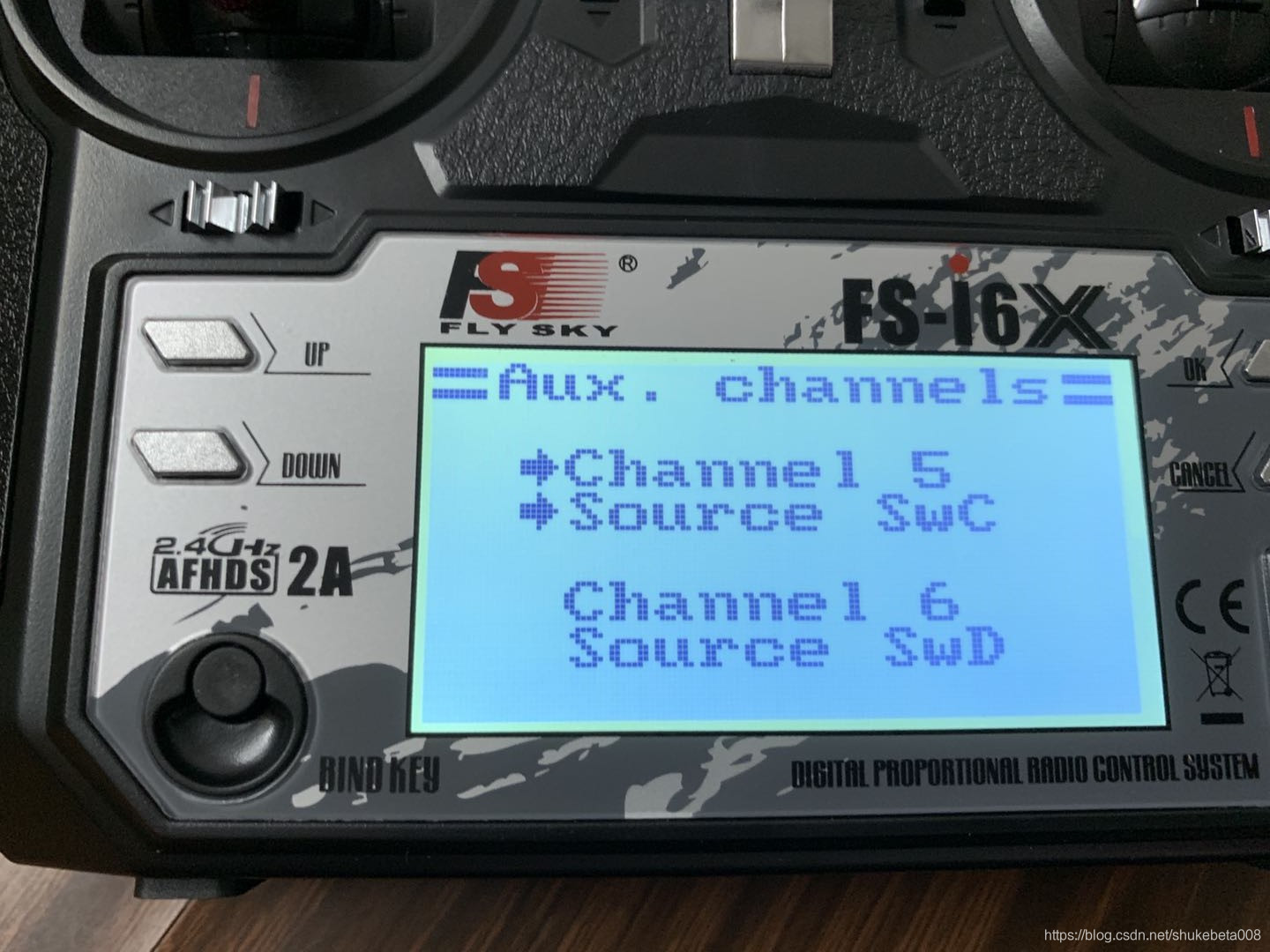
我决定用swc控制5通道,swd控制6通道。
根据福斯说明书7.13,先决定哪些开关启用。
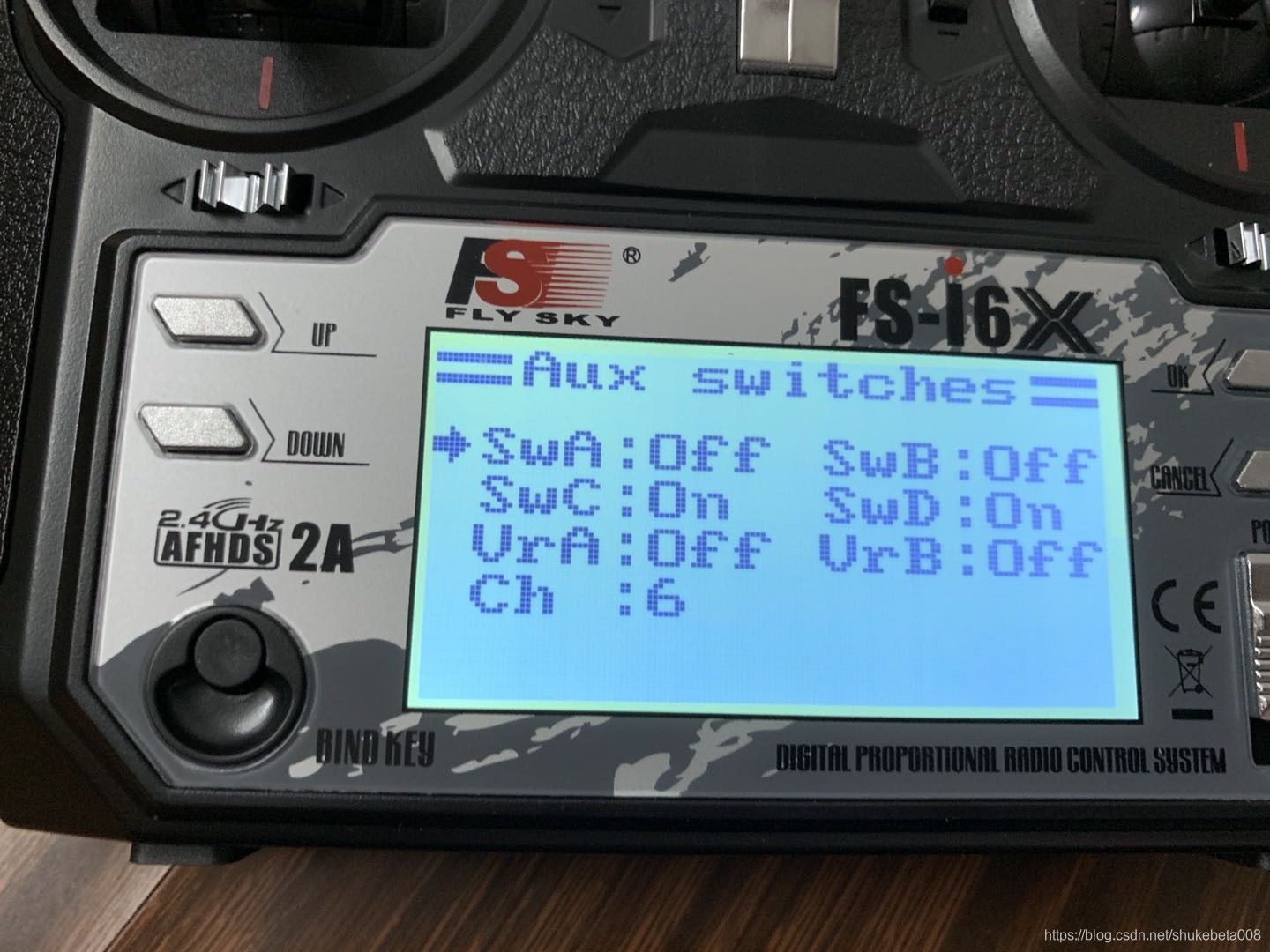
然后根据5.5把这些开关与5,6通道对应。
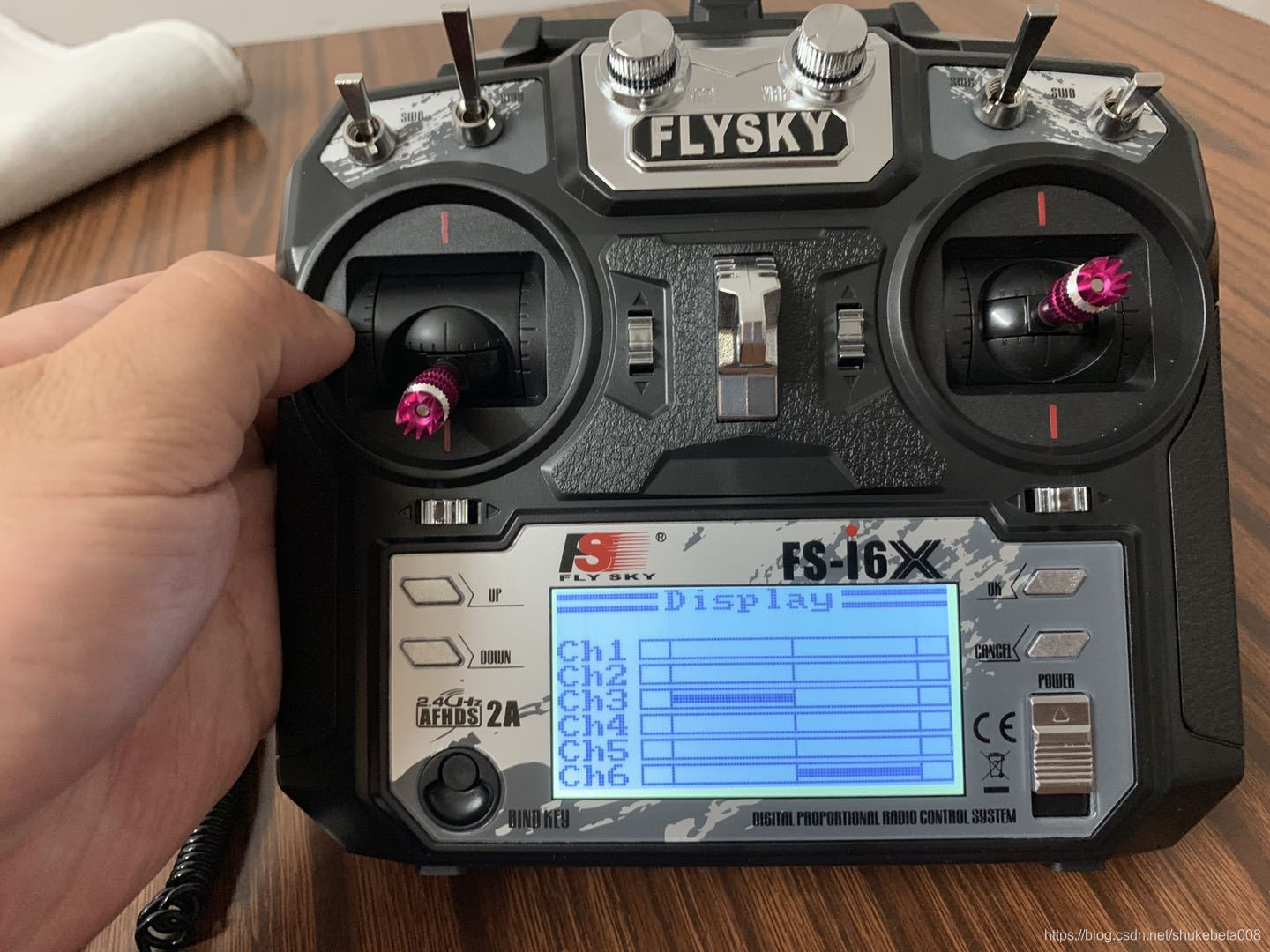
最后可以用5.4检查一下他们会在接收机上如何输出。
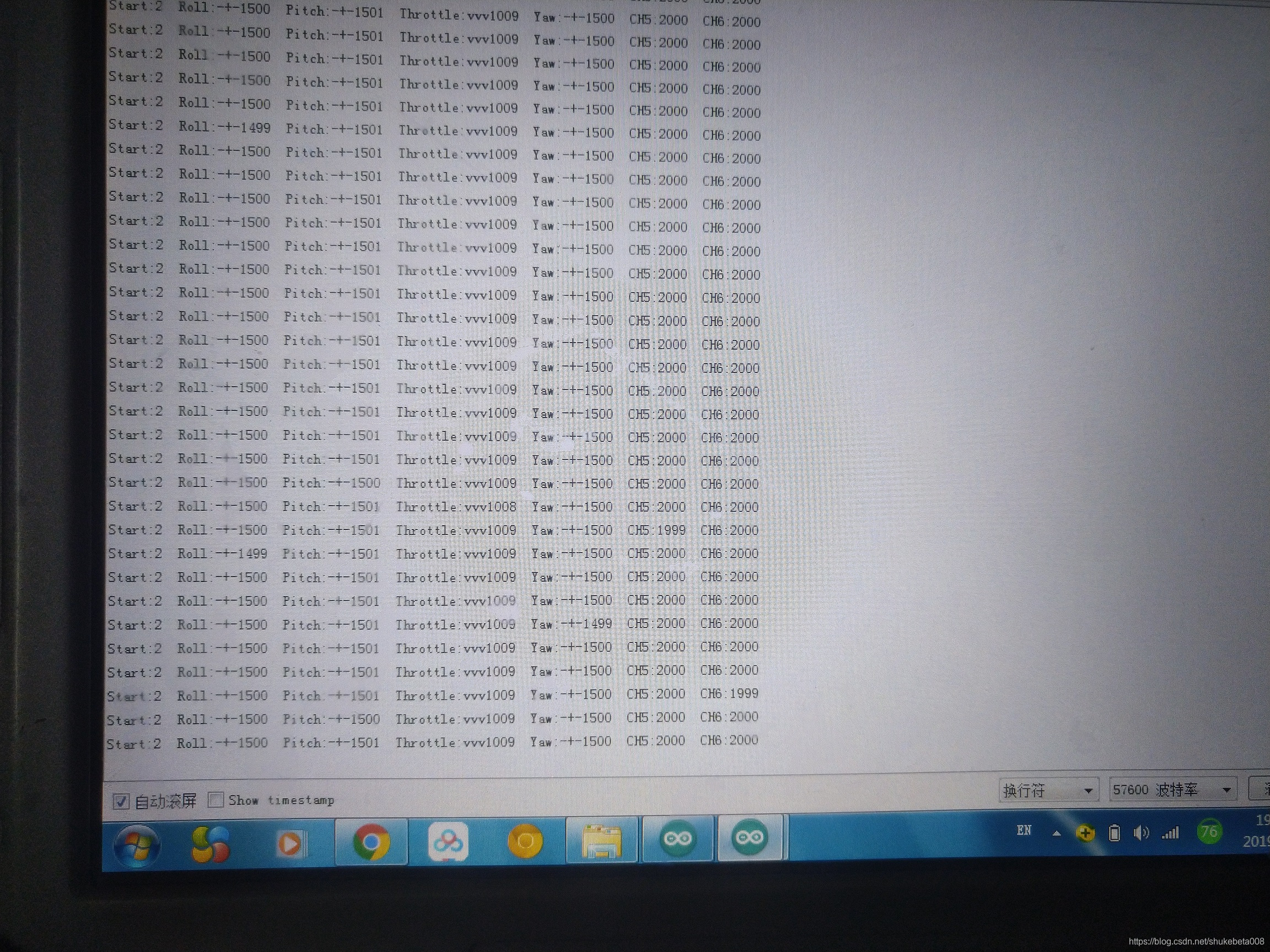
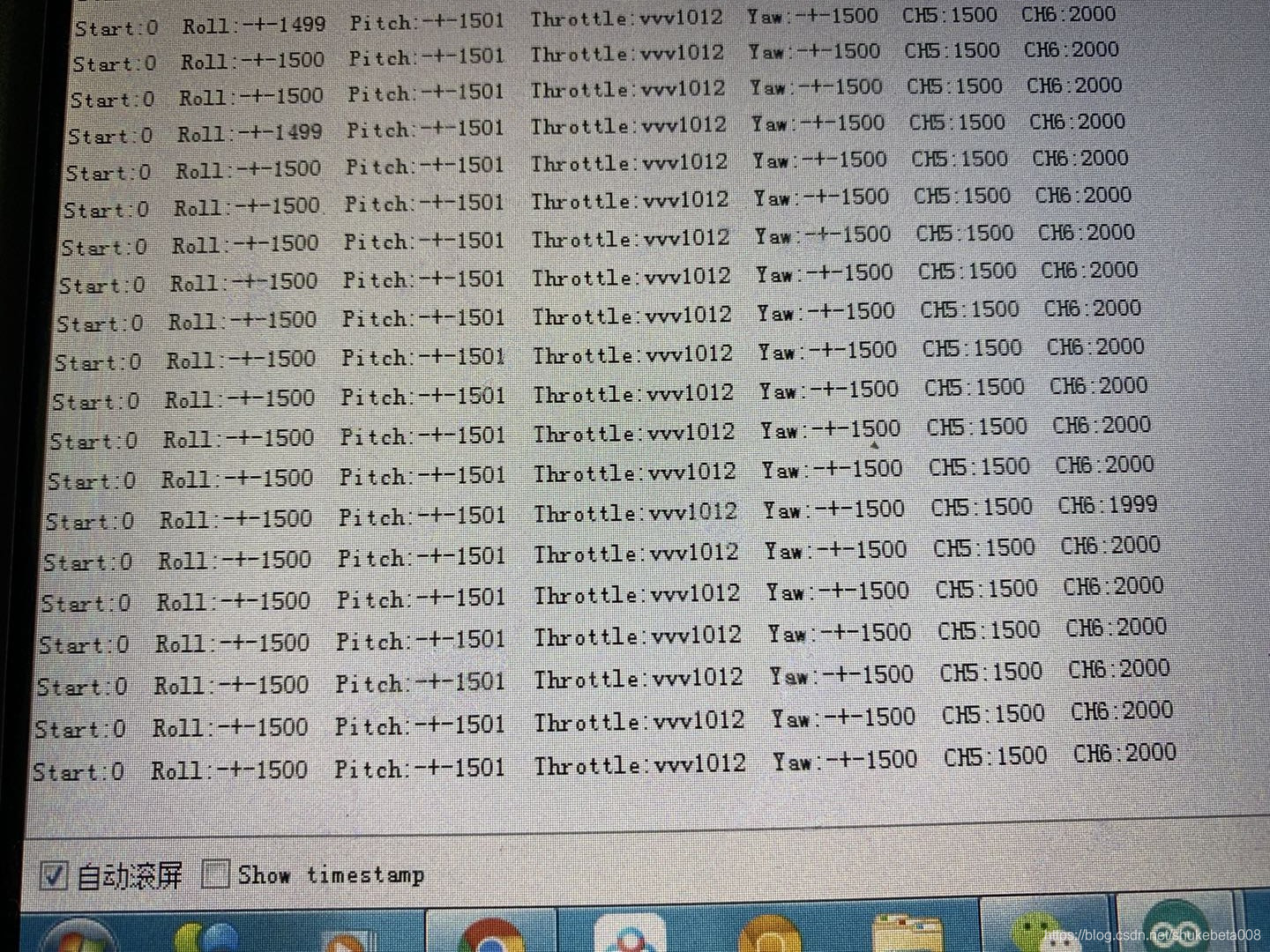
搞定后再用飞控测试程序检查实际接收机输出。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!