ROS计算图——rqt_graph

一、计算图简介
rqt_graph能够创建一个显示当前系统ROS程序运行情况的动态图形,ROS分布式系统中不同进程需要进行数据之间的交互,计算图可以以点的网络形式表现数据交互过程,rqt_graph是rqt程序包的其中之一
二、计算图安装以及启动
sudo apt install ros-noetic-rqtsudo apt install ros-noetic-rqt-common-plugins注意:noetic 要换成你对应的ros版本,如:melodic kinetic
启动:
rosrun rqt_graph rqt_graph三、计算图rqt_graph演示
以小乌龟画图为例,打开终端
第一步:打开ros
roscore第二步:打开画图界面
rosrun turtlesim turtlesim_node第三步:用箭头可以控制小乌龟动
(注意记得点一下第三个终端界面然后按键盘上的箭头符号)
rosrun turtlesim turtle_teleop_key第四步:启动rqt_graph
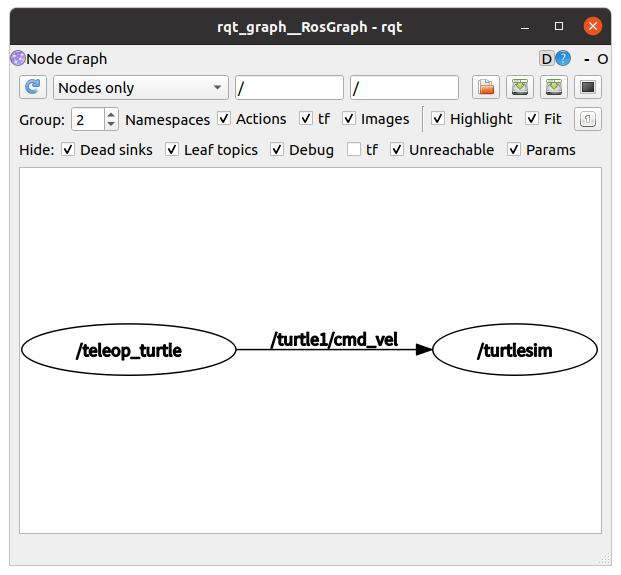
rosrun rqt_graph rqt_graph 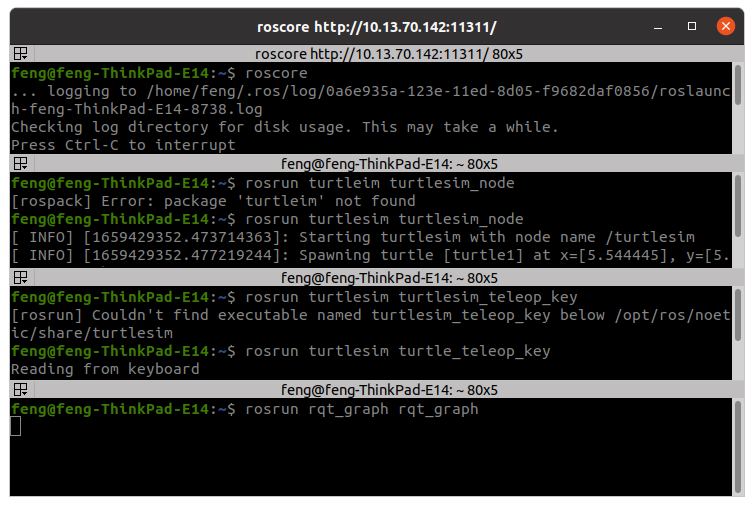
rqt_graph计算图效果
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!