[CV] Rotated IoU 计算旋转矩形之间的重叠面积
[CV] Rotated IoU 计算旋转矩形之间的重叠面积
文章目录
- [CV] Rotated IoU 计算旋转矩形之间的重叠面积
- 简介
- 旋转包围盒的编码方式
- 矢量的旋转公式
- 包围盒转化为角点
- 代码表示
- 相交区域的特点
- 点在四边形(矩形)内
- 点积的物理意义
- 代码
- 线段交点
- 判断线段是否相交
- 相交后转化为直线交点
- 代码
- 计算相交区域面积
- 顶点排序
- 顶点排序代码
- 简易版三角剖分
- 所有代码
简介
在目标检测的领域,基于Anchor的方法需要对Anchor分配正负样本的标签。通常,对于axis-aligned的anchor和ground truth,可以直接通过 [top left right down]四个值计算他们之间的重叠面积。但是针对于旋转的矩形框,这个问题就变得尤为复杂。
我参考了3D目标检测论文SECOND的源码,来尝试解释一下如何计算旋转包围盒的重叠面积。
代码全部来自second.pytorch这个项目的早期版本,去掉了numba/cuda加速的代码。
旋转包围盒的编码方式
作者代码使用了两种方式
- 通过包围盒中心点位置,尺度以及角度来编码
rbbox
rbbox = [x, y, x_d (w), y_d (h), angle]
- 通过包围盒的顶点
corners来编码
矢量的旋转公式
将矢量看作列矢量 α ⃗ ∈ R 2 × 1 \vec{\alpha}\in \mathbb R^{2\times1} α∈R2×1, 则将其逆时针旋转 θ \theta θ 之后的矢量为:
[ cos θ − sin θ sin θ cos θ ] α ⃗ \begin{bmatrix}\cos\theta&-\sin\theta\\ \sin\theta & \cos\theta\end{bmatrix}\vec{\alpha} [cosθsinθ−sinθcosθ]α
包围盒转化为角点
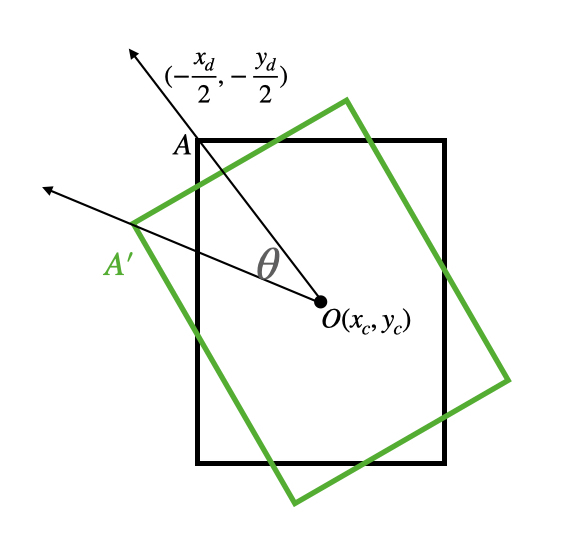
如图,rbbox为绿色的包围盒,是原始黑色包围盒通过逆时针旋转 θ \theta θ角度得到。分析 A ’ A’ A’ 的真实坐标:
首先向量 O A → \overrightarrow{OA} OA 被表示为
O A → = [ − x d 2 , − y d 2 ] T \overrightarrow{OA} = [-\frac{x_d}{2}, -\frac{y_d}{2}]^T OA=[−2xd,−2yd]T
旋转后的向量可以被表示为
O A ′ → = T θ O A → = [ cos θ ⋅ − x d 2 − sin θ − y d 2 sin θ − x d 2 + cos θ − y d 2 ] \overrightarrow{OA'} = T_\theta\overrightarrow{OA} = \begin{bmatrix} \cos\theta\cdot\frac{-x_d}{2} -\sin\theta\frac{-y_d}{2}\\ \sin\theta \frac{-x_d}{2} + \cos\theta\frac{-y_d}{2}\end{bmatrix} OA′=TθOA=[cosθ⋅2−xd−sinθ2−ydsinθ2−xd+cosθ2−yd]
通过 A ’ = O + O A ’ → A’ = O + \overrightarrow{OA’} A’=O+OA’ 恢复顶点的坐标即可。
代码表示
下段代码将[x, y, x_d, y_d, angle]转化为顺时针方方向表示的顶点坐标[x0, y0, x1, y1, x2, y2, x3, y3]
import math
def rbbox_to_corners(rbbox):# generate clockwise corners and rotate it clockwise# 顺时针方向返回角点位置cx, cy, x_d, y_d, angle = rbboxa_cos = math.cos(angle)a_sin = math.sin(angle)corners_x = [-x_d / 2, -x_d / 2, x_d / 2, x_d / 2]corners_y = [-y_d / 2, y_d / 2, y_d / 2, -y_d / 2]corners = [0] * 8for i in range(4):corners[2 *i] = a_cos * corners_x[i] + \a_sin * corners_y[i] + cxcorners[2 * i +1] = -a_sin * corners_x[i] + \a_cos * corners_y[i] + cyreturn corners
测试一下结果:
rbbox = [0, 0, 2, 4, math.pi / 2]
corners = rbbox_to_corners(rbbox)
print([round(_) for _ in corners])
# [-2, 1, 2, 1, 2, -1, -2, -1]
相交区域的特点
两个四边形(矩形),求交叠面积,可以先求出相交的多边形(Polygon)的顶点, 构成多边形的顶点可由两种类型的点构成:
- 原始四边形的顶点
- 四边形的边相交产生的交点
对应问题为:
- 判断点在四边形内
- 判断线段的交点
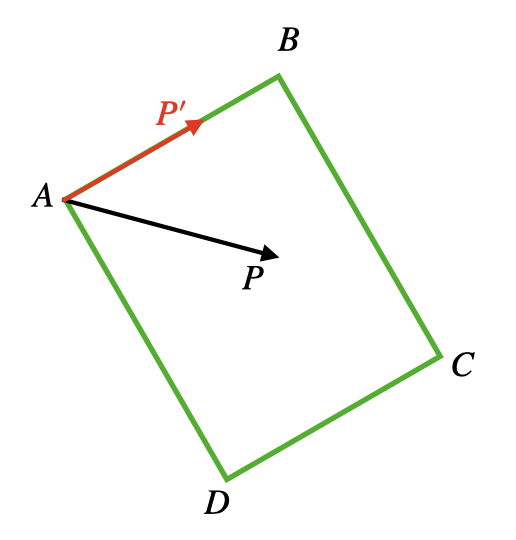
点在四边形(矩形)内
如图所示,四边形(矩形)通过ABCD四个顶点表示,可以使用较强的规则判断P在矩形内,即AP在AB 的投影在线段AB上,在AD的投影在线段AD上。
点积的物理意义
两个矢量的点积是标量,点积满足交换律:
- 矢量的模被定义为 ∣ a ∣ = a ⋅ a |a|=\sqrt{a\cdot a} ∣a∣=a⋅a
- a ⋅ b = ∣ a ∣ ∣ b ∣ cos θ a\cdot b = |a||b|\cos\theta a⋅b=∣a∣∣b∣cosθ 实际表示为 b b b在 a a a上的投影的长度。如果投影与 a a a方向相反,则为负值
所以代码的思路就是,通过点击得到投影长度,通过判断投影长度确定点在矩形框内。
代码
SECOND函数为 point_in_quadrilateral
def point_in_quadrilateral(pt_x, pt_y, corners):ab0 = corners[2] - corners[0]ab1 = corners[3] - corners[1]ad0 = corners[6] - corners[0]ad1 = corners[7] - corners[1]ap0 = pt_x - corners[0]ap1 = pt_y - corners[1]abab = ab0 * ab0 + ab1 * ab1abap = ab0 * ap0 + ab1 * ap1adad = ad0 * ad0 + ad1 * ad1adap = ad0 * ap0 + ad1 * ap1return abab >= abap and abap >= 0 and adad >= adap and adap >= 0
线段交点
判断线段是否相交
参考:判断线段相交的最简方法]
对于两个直线是否相交,一种方法是计算线段斜率,首先确定不平行,然后联立方程,计算交点坐标,最后运用定比分点公式,判断交点是否在线段上。但是使用斜率和定比分点,可能会出现精度丢失的现象,同时浮点数运算耗时。
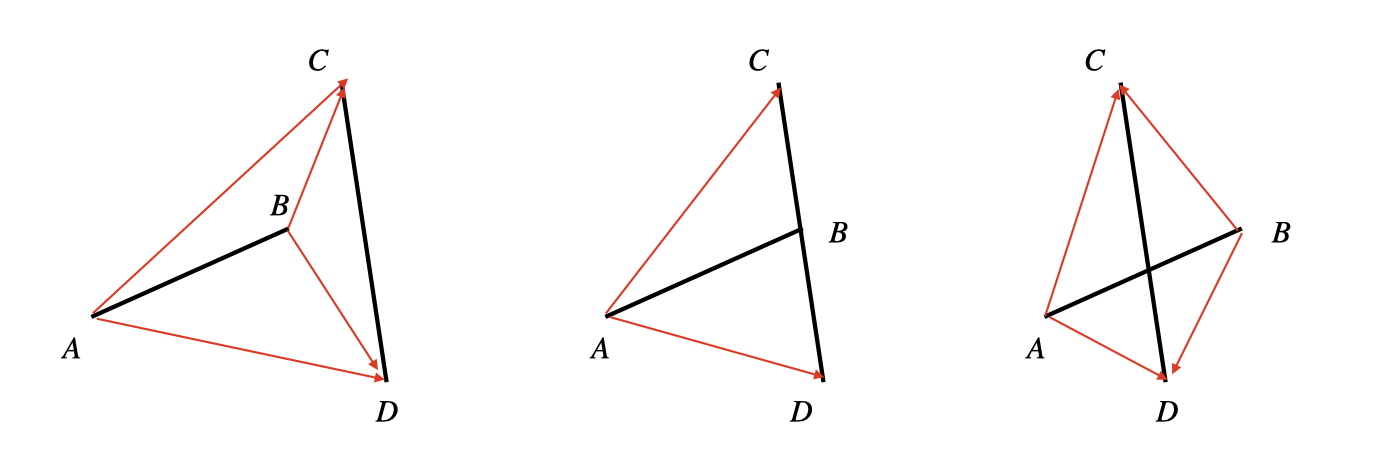
上图可以表示两个线段位置的所有可能情况。定义direct(a, b) 为向量有序对的旋转方向。其旋转方向为 使 a 能够旋转一个小于 180 度的角并与 b 重合的方向,简记为 direct(a, b)。若 a 和 b 反向共线,则旋转方向取任意值。
则上图三种情况可以概括为:
direct(AC, AD)和direct(BC, BD)为顺时针,direct(CA, CB)为逆时针,direct(DA, DB)为顺时针direct(AC, AD)顺时针,direct(BC, BD)为任意方向,direct(CA, CB)为逆时针,direct(DA, DB)为顺时针direct(AC, AD)和direct(DA, DB)为顺时针,direct(BC, BD)和direct(CA, CB)为逆时针
可以得知,两条线段相交的充要条件是direct(AC, AD) != direct(BC, BD) 和 direct(CA, CB) != direct(DA, DB)
定义 < a ⃗ , b ⃗ > <\vec{a}, \vec{b}> <a,b> 为 a ⃗ \vec{a} a 逆时针旋转到与 b ⃗ \vec{b} b 重合的角度。有:
direct(a, b)顺时针, 0 ≤ < a ⃗ , b ⃗ > ≤ 180 0\le<\vec{a}, \vec{b}>\le180 0≤<a,b>≤180, sin < a ⃗ , b ⃗ > ≥ 0 \sin<\vec{a}, \vec{b}> \ge0 sin<a,b>≥0direct(a, b)逆时针, 180 ≤ < a ⃗ , b ⃗ > ≤ 360 180\le<\vec{a}, \vec{b}>\le360 180≤<a,b>≤360, sin < a ⃗ , b ⃗ > ≤ 0 \sin<\vec{a}, \vec{b}>\le0 sin<a,b>≤0
问题可以转化为有向角正弦值的问题。可以使用叉乘来做:
a ⃗ × b ⃗ = a x ⋅ b y − a y ⋅ b x \vec{a}\times\vec{b}=a_x\cdot b_y - a_y \cdot b_x a×b=ax⋅by−ay⋅bx
叉乘表示 a ⃗ , b ⃗ \vec{a}, \vec{b} a,b 构成平行四边行的有向面积
∣ a ⃗ × b ⃗ ∣ = ∣ a ⃗ ∣ ⋅ ∣ b ⃗ ∣ ⋅ sin θ |\vec{a}\times\vec{b}|=|\vec{a}|\cdot|\vec{b}|\cdot\sin\theta ∣a×b∣=∣a∣⋅∣b∣⋅sinθ
-
伸出右手,将四指由 a ⃗ \vec{a} a沿小于平角转到 b ⃗ \vec{b} b。若拇指指向纸面上方,则 a ⃗ × b ⃗ \vec{a}\times\vec{b} a×b 为正,否则为负。
-
若向量共线,叉积为0
叉积的正负可以判断 < a ⃗ , b ⃗ > <\vec{a},\vec{b}> <a,b> 的角度范围。所以充要条件等价于叉积符号不同。
相交后转化为直线交点
Wiki Line–line intersection
Using homogeneous coordinates
直接用wiki的结论,两个点可以确定一条直线,因此定义两条直线 ( x 1 , y 1 ) ( x 2 , y 2 ) (x_1, y_1) (x_2, y_2) (x1,y1)(x2,y2) 和 ( x 3 , y 3 ) ( x 4 , y 4 ) (x_3, y_3) (x_4, y_4) (x3,y3)(x4,y4) ,可以通过以下公式计算交点的坐标 ( P x , P y ) (P_x, P_y) (Px,Py)
P x = ( x 1 y 2 − y 1 x 2 ) ( x 3 − x 4 ) − ( x 1 − x 2 ) ( x 3 y 4 − y 3 x 4 ) ( x 1 − x 2 ) ( y 3 − y 4 ) − ( y 1 − y 2 ) ( x 3 − x 4 ) P_x = \frac{(x_1y_2 - y_1x_2)(x_3 -x_4) - (x_1 - x_2)(x_3y_4 - y_3x_4)}{(x_1-x_2)(y_3-y_4) - (y_1-y_2)(x_3 - x_4)} Px=(x1−x2)(y3−y4)−(y1−y2)(x3−x4)(x1y2−y1x2)(x3−x4)−(x1−x2)(x3y4−y3x4)
P y = ( x 1 y 2 − y 1 x 2 ) ( y 3 − y 4 ) − ( y 1 − y 2 ) ( x 3 y 4 − y 3 x 4 ) ( x 1 − x 2 ) ( y 3 − y 4 ) − ( y 1 − y 2 ) ( x 3 − x 4 ) P_y = \frac{(x_1y_2-y_1x_2)(y_3-y_4) - (y_1-y_2)(x_3y_4-y_3x_4)}{(x_1-x_2)(y_3-y_4) - (y_1-y_2)(x_3-x_4)} Py=(x1−x2)(y3−y4)−(y1−y2)(x3−x4)(x1y2−y1x2)(y3−y4)−(y1−y2)(x3y4−y3x4)
代码
代码如下
def line_segment_intersection(pts1, pts2, i, j):# pts1, pts2 为corners# i j 分别表示第几个交点,取其和其后一个点构成的线段# 返回为 tuple(bool, pts) bool=True pts为交点A, B, C, D, ret = [0, 0], [0, 0], [0, 0], [0, 0], [0, 0]A[0] = pts1[2 * i]A[1] = pts1[2 * i + 1]B[0] = pts1[2 * ((i + 1) % 4)]B[1] = pts1[2 * ((i + 1) % 4) + 1]C[0] = pts2[2 * j]C[1] = pts2[2 * j + 1]D[0] = pts2[2 * ((j + 1) % 4)]D[1] = pts2[2 * ((j + 1) % 4) + 1]BA0 = B[0] - A[0]BA1 = B[1] - A[1]DA0 = D[0] - A[0]CA0 = C[0] - A[0]DA1 = D[1] - A[1]CA1 = C[1] - A[1]# 叉乘判断方向acd = DA1 * CA0 > CA1 * DA0bcd = (D[1] - B[1]) * (C[0] - B[0]) > (C[1] - B[1]) * (D[0] - B[0])if acd != bcd:abc = CA1 * BA0 > BA1 * CA0abd = DA1 * BA0 > BA1 * DA0# 判断方向if abc != abd:DC0 = D[0] - C[0]DC1 = D[1] - C[1]ABBA = A[0] * B[1] - B[0] * A[1]CDDC = C[0] * D[1] - D[0] * C[1]DH = BA1 * DC0 - BA0 * DC1Dx = ABBA * DC0 - BA0 * CDDCDy = ABBA * DC1 - BA1 * CDDCret[0] = Dx / DHret[1] = Dy / DHreturn True, retreturn False, ret
测试结果:
if __name__ == '__main__':rbbox1 = [0, 0, 2, 4, 0]rbbox2 = [0, 0, 4, 2, 0]corners1 = rbbox_to_corners(rbbox1)corners2 = rbbox_to_corners(rbbox2)for i in range(4):for j in range(4):ret, pts = line_segment_intersection(corners1, corners2, i, j)if ret:print('Px: {}, Py: {}'.format(*pts))
"""
Px: -1.0, Py: 1.0
Px: -1.0, Py: -1.0
Px: 1.0, Py: 1.0
Px: 1.0, Py: -1.0
"""
计算相交区域面积
当有了构成相交区域多边行的顶点后,可以通过以下两部分计算相交区域的面积:
- 将顶点按照顺时针或者逆时针排序
- 三角剖分计算面积
顶点排序
在凸多边形内部取一点,与顶点连线,可以通过连线与坐标轴构成的角度排序。操作如下
- 计算所有顶点的横纵坐标均值,记作中心点
- 计算中心点到每个单位向量[vx, vy]。
- 以x轴正方向为其实遍,按照顺时针方向扫描360度,对扫描到的点进行排序
关于步骤3,具体操作为:对于已经归一化单位向量,先考虑从180度到360度,有 v y ≥ 0 v_y\ge0 vy≥0, − 1 < v x < 1 -1
- v y > 0 , k = v x v_y >0, k = v_x vy>0,k=vx
- v y < 0 , k = − 2 − v x v_y < 0, k = -2-v_x vy<0,k=−2−vx
顶点排序代码
def sort_vertex_in_convex_polygon(int_pts, num_of_inter):def _cmp(pt, center):vx = pt[0] - center[0]vy = pt[1] - center[1]d = math.sqrt(vx * vx + vy * vy)vx /= dvy /= dif vy < 0:vx = -2 - vxreturn vxif num_of_inter > 0:center = [0, 0]for i in range(num_of_inter):center[0] += int_pts[i][0]center[1] += int_pts[i][1]center[0] /= num_of_intercenter[1] /= num_of_interint_pts.sort(key=lambda x: _cmp(x, center))
简易版三角剖分
将多边形转化为多个三角形面积之和,具体操作为固定一个点,按照顺时针顺序依次选择剩下的2个点,计算三角形面积(利用叉积) 最后将三角形面积求和。
代码如下:
def area(int_pts, num_of_inter):def _trangle_area(a, b, c):return ((a[0] - c[0]) * (b[1] - c[1]) - (a[1] - c[1]) *(b[0] - c[0])) / 2.0area_val = 0.0for i in range(num_of_inter - 2):area_val += abs(_trangle_area(int_pts[0], int_pts[i + 1],int_pts[i + 2]))return area_val
所有代码
代码汇总如下
import mathdef rbbox_to_corners(rbbox):# generate clockwise corners and rotate it clockwise# 顺时针方向返回角点位置cx, cy, x_d, y_d, angle = rbboxa_cos = math.cos(angle)a_sin = math.sin(angle)corners_x = [-x_d / 2, -x_d / 2, x_d / 2, x_d / 2]corners_y = [-y_d / 2, y_d / 2, y_d / 2, -y_d / 2]corners = [0] * 8for i in range(4):corners[2 *i] = a_cos * corners_x[i] + \a_sin * corners_y[i] + cxcorners[2 * i +1] = -a_sin * corners_x[i] + \a_cos * corners_y[i] + cyreturn cornersdef point_in_quadrilateral(pt_x, pt_y, corners):ab0 = corners[2] - corners[0]ab1 = corners[3] - corners[1]ad0 = corners[6] - corners[0]ad1 = corners[7] - corners[1]ap0 = pt_x - corners[0]ap1 = pt_y - corners[1]abab = ab0 * ab0 + ab1 * ab1abap = ab0 * ap0 + ab1 * ap1adad = ad0 * ad0 + ad1 * ad1adap = ad0 * ap0 + ad1 * ap1return abab >= abap and abap >= 0 and adad >= adap and adap >= 0def line_segment_intersection(pts1, pts2, i, j):# pts1, pts2 为corners# i j 分别表示第几个交点,取其和其后一个点构成的线段# 返回为 tuple(bool, pts) bool=True pts为交点A, B, C, D, ret = [0, 0], [0, 0], [0, 0], [0, 0], [0, 0]A[0] = pts1[2 * i]A[1] = pts1[2 * i + 1]B[0] = pts1[2 * ((i + 1) % 4)]B[1] = pts1[2 * ((i + 1) % 4) + 1]C[0] = pts2[2 * j]C[1] = pts2[2 * j + 1]D[0] = pts2[2 * ((j + 1) % 4)]D[1] = pts2[2 * ((j + 1) % 4) + 1]BA0 = B[0] - A[0]BA1 = B[1] - A[1]DA0 = D[0] - A[0]CA0 = C[0] - A[0]DA1 = D[1] - A[1]CA1 = C[1] - A[1]# 叉乘判断方向acd = DA1 * CA0 > CA1 * DA0bcd = (D[1] - B[1]) * (C[0] - B[0]) > (C[1] - B[1]) * (D[0] - B[0])if acd != bcd:abc = CA1 * BA0 > BA1 * CA0abd = DA1 * BA0 > BA1 * DA0# 判断方向if abc != abd:DC0 = D[0] - C[0]DC1 = D[1] - C[1]ABBA = A[0] * B[1] - B[0] * A[1]CDDC = C[0] * D[1] - D[0] * C[1]DH = BA1 * DC0 - BA0 * DC1Dx = ABBA * DC0 - BA0 * CDDCDy = ABBA * DC1 - BA1 * CDDCret[0] = Dx / DHret[1] = Dy / DHreturn True, retreturn False, retdef sort_vertex_in_convex_polygon(int_pts, num_of_inter):def _cmp(pt, center):vx = pt[0] - center[0]vy = pt[1] - center[1]d = math.sqrt(vx * vx + vy * vy)vx /= dvy /= dif vy < 0:vx = -2 - vxreturn vxif num_of_inter > 0:center = [0, 0]for i in range(num_of_inter):center[0] += int_pts[i][0]center[1] += int_pts[i][1]center[0] /= num_of_intercenter[1] /= num_of_interint_pts.sort(key=lambda x: _cmp(x, center))def area(int_pts, num_of_inter):def _trangle_area(a, b, c):return ((a[0] - c[0]) * (b[1] - c[1]) - (a[1] - c[1]) *(b[0] - c[0])) / 2.0area_val = 0.0for i in range(num_of_inter - 2):area_val += abs(_trangle_area(int_pts[0], int_pts[i + 1],int_pts[i + 2]))return area_valif __name__ == '__main__':rbbox1 = [0, 0, 2, 4, 0]rbbox2 = [0, 0, 4, 2, 0]corners1 = rbbox_to_corners(rbbox1)corners2 = rbbox_to_corners(rbbox2)pts, num_pts = [], 0for i in range(4):point = [corners1[2 * i], corners1[2 * i + 1]]if point_in_quadrilateral(point[0], point[1],corners2):num_pts += 1pts.append(point)for i in range(4):point = [corners2[2 * i], corners2[2 * i + 1]]if point_in_quadrilateral(point[0], point[1],corners1):num_pts += 1pts.append(point)for i in range(4):for j in range(4):ret, point = line_segment_intersection(corners1, corners2, i, j)if ret:num_pts += 1pts.append(point)sort_vertex_in_convex_polygon(pts, num_pts)polygon_area = area(pts, num_pts)print('area: {}'.format(polygon_area))
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!