【个人简记】基于MDH,6R机器人运动学正解
【个人理解,有错请指出,谢谢】
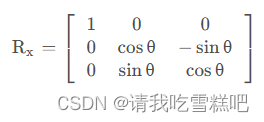
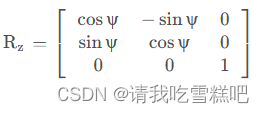
MDH的建模方式先通过x轴变化再通过z轴变化
因此可以发现关节之间旋转的变化如下图
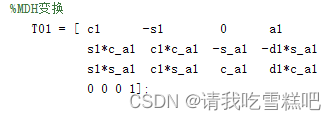
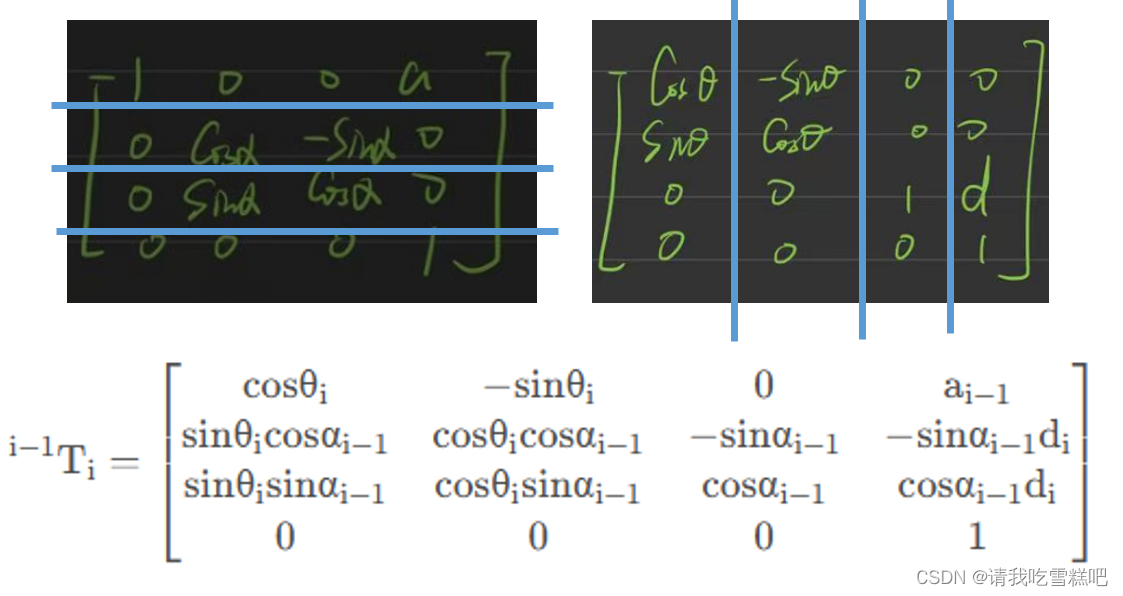
关节的变化矩阵如下图所示,以关节1变换到关节2为例
s1 = sinθ1; c1 = cosθ1; s_a1 = sinα1; c_a1 = cosα1;
matlab代码如下图,EndPosture为末端位姿,注意输入的θ的值要考虑机械臂 当前的角度 和 初始的旋转角度offset
%MDH变换T01 = [ c1 -s1 0 a1s1*c_a1 c1*c_a1 -s_a1 -d1*s_a1s1*s_a1 c1*s_a1 c_a1 d1*c_a10 0 0 1];T12 = [ c2 -s2 0 a2s2*c_a2 c2*c_a2 -s_a2 -d2*s_a2s2*s_a2 c2*s_a2 c_a2 d2*c_a20 0 0 1];T23 = [ c3 -s3 0 a3s3*c_a3 c3*c_a3 -s_a3 -d3*s_a3s3*s_a3 c3*s_a3 c_a3 d3*c_a30 0 0 1];T34 = [ c4 -s4 0 a4s4*c_a4 c4*c_a4 -s_a4 -d4*s_a4s4*s_a4 c4*s_a4 c_a4 d4*c_a40 0 0 1];T45 = [ c5 -s5 0 a5s5*c_a5 c5*c_a5 -s_a5 -d5*s_a5s5*s_a5 c5*s_a5 c_a5 d5*c_a50 0 0 1];T56 = [ c6 -s6 0 a6s6*c_a6 c6*c_a6 -s_a6 -d6*s_a6s6*s_a6 c6*s_a6 c_a6 d6*c_a60 0 0 1];
EndPosture = T01 * T12 * T23 * T34 * T45 * T56;
nx = EndPosture(1,1); ox = EndPosture(1,2); ax = EndPosture(1,3); rx = EndPosture(1,4);
ny = EndPosture(2,1); oy = EndPosture(2,2); ay = EndPosture(2,3); ry = EndPosture(2,4);
nz = EndPosture(3,1); oz = EndPosture(3,2); az = EndPosture(3,3); rz = EndPosture(3,4);确定了末端位姿的准确性之后,需要将除了θ的参数全部带入确定数值,特别是α的值带入后sinα和cosα值算出啦
%进行确切的alpha计算,不然会导致参数过大 s_a1 = 0; s_a2 = 1; s_a3 = 0; s_a4 = -1; s_a5 = 1; s_a6 = -1;c_a1 = 1; c_a2 = 0; c_a3 = 1; c_a4 = 0; c_a5 = 0; c_a6 = 0;最后为了方便快捷的计算,将末端位姿的4x4齐次矩阵中每个位置的计算公式写出来,完成正运动学公式编写
nx = - c6*(s5*(c1*c2*s3 + c1*c3*s2) + c5*(s1*s4 - c4*(c1*c2*c3 -c1*s2*s3))) - s6*(c4*s1 + s4*(c1*c2*c3 - c1*s2*s3));
ny = s6*(c1*c4 - s4*(c2*c3*s1 - s1*s2*s3)) - c6*(s5*(c2*s1*s3 + c3*s1*s2) - c5*(c1*s4 + c4*(c2*c3*s1 - s1*s2*s3)));
nz = c6*(s5*(c2*c3 - s2*s3) + c4*c5*(c2*s3 + c3*s2)) - s4*s6*(c2*s3 + c3*s2);
ox = s6*(s5*(c1*c2*s3 + c1*c3*s2) + c5*(s1*s4 - c4*(c1*c2*c3 - c1*s2*s3))) - c6*(c4*s1 + s4*(c1*c2*c3 - c1*s2*s3));
oy = s6*(s5*(c2*s1*s3 + c3*s1*s2) - c5*(c1*s4 + c4*(c2*c3*s1 - s1*s2*s3))) + c6*(c1*c4 - s4*(c2*c3*s1 - s1*s2*s3));
oz = - s6*(s5*(c2*c3 - s2*s3) + c4*c5*(c2*s3 + c3*s2)) - c6*s4*(c2*s3 + c3*s2);
ax = s5*(s1*s4 - c4*(c1*c2*c3 - c1*s2*s3)) - c5*(c1*c2*s3 + c1*c3*s2);
ay = - c5*(c2*s1*s3 + c3*s1*s2) - s5*(c1*s4 + c4*(c2*c3*s1 - s1*s2*s3));
az = c5*(c2*c3 - s2*s3) - c4*s5*(c2*s3 + c3*s2);rx = a2*c1 - d4*(c1*c2*s3 + c1*c3*s2) + a3*c1*c2;
ry = a2*s1 - d4*(c2*s1*s3 + c3*s1*s2) + a3*c2*s1;
rz = d1 + a3*s2 + d4*(c2*c3 - s2*s3);EndPosture = [nx, ox, ax, rxny, oy, ay, rynz, oz, az, rz0, 0, 0, 1];本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!