基于表格的RL:Q-learning、sarsa
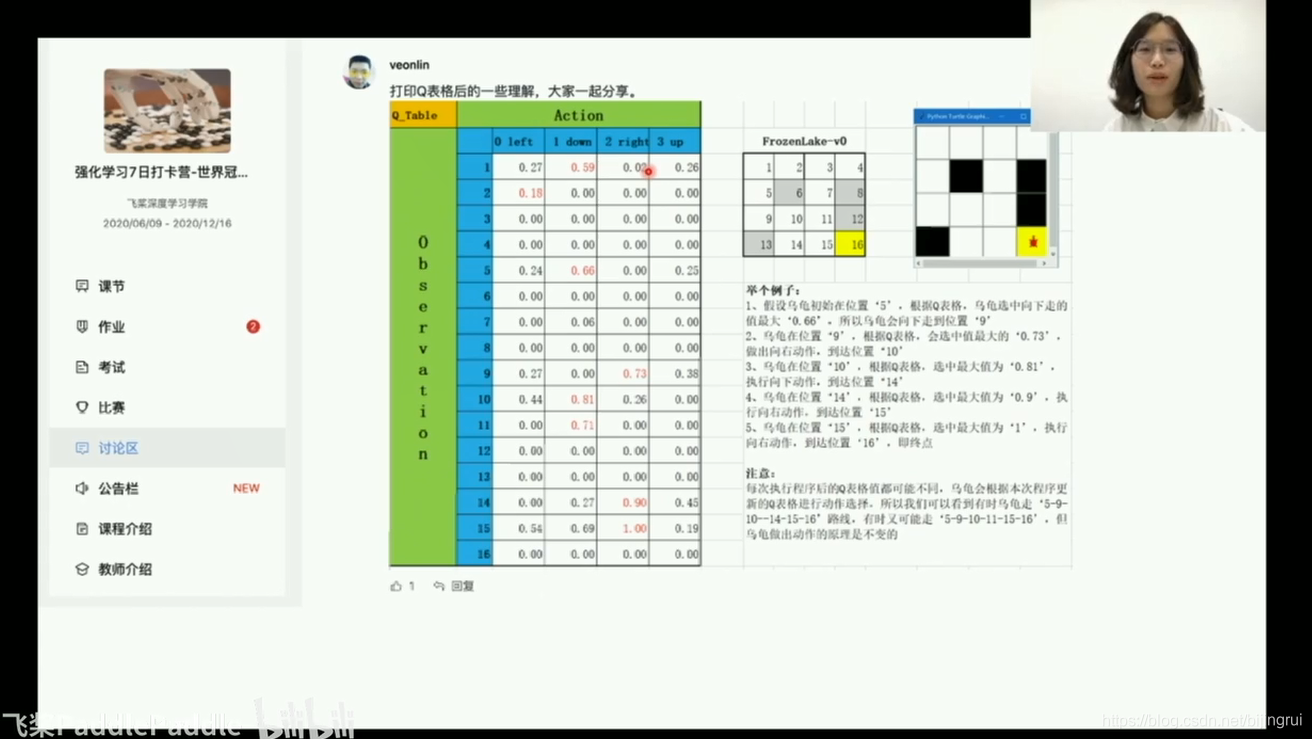
value-based表格简介
state:有限个(离散)
action:有限个(离散)
里面的值 对应的是 当前state下,做这个action,价值是多少!
价值不仅仅与 当前状态state做完action拿到的reward有关,还与进入下一个状态state_拿到奖励的期望有关

马尔科夫
马尔科夫性
马尔可夫性质(英语:Markov property)是概率论中的一个概念,因为俄国数学家安德雷·马尔可夫得名[1]。当一个随机过程在给定现在状态及所有过去状态情况下,其未来状态的条件概率分布仅依赖于当前状态;换句话说,在给定现在状态时,它与过去状态(即该过程的历史路径)是条件独立的,那么此随机过程即具有马尔可夫性质。具有马尔可夫性质的过程通常称之为马尔可夫过程。
马尔科夫链
马尔可夫链(英语:Markov chain),又称离散时间马尔可夫链(discrete-time Markov chain,缩写为DTMC[1]),因俄国数学家安德烈·马尔可夫得名,为状态空间中经过从一个状态到另一个状态的转换的随机过程。该过程要求具备“无记忆”的性质:下一状态的概率分布只能由当前状态决定,在时间序列中它前面的事件均与之无关。这种特定类型的“无记忆性”称作马尔可夫性质。马尔科夫链作为实际过程的统计模型具有许多应用。
马尔科夫决策过程MDP
要素包括状态S、动作A、状态转移概率P 和奖励R
P函数反映了环境的随机性,做出(s,a)之后,进入哪个s' 由P决定。
自己的总结
我处在当前的状态s,未来的状态
只跟当前状态s有关,与之前的状态无关。
我处在当前状态s,我做什么动作a,都不需要考虑之前的状态。

近朱者赤近墨者黑
虽然我在state下做action得到的reward不高,甚至可能小负,比如-2,
但是我100%进入下一个好的状态 state_,在这个状态下 做任何reward都是+100的奖励,
那么我认为q(s,a) = -2 + gama * 100

在靠近done的位置state,做正确action得reward (比如+100),因为它done了,所以它的动作的价值就是获得的这个reward。
那么靠近final位置的 state,做进入这个state的action,得到reward (小) + gama * 100
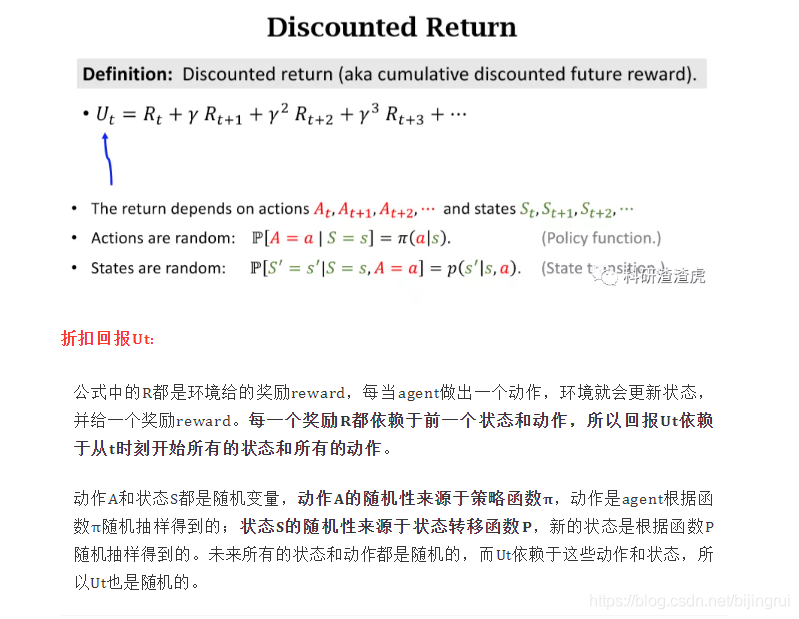
表格里的值 动作的价值 就是 discounted return!
TD更新
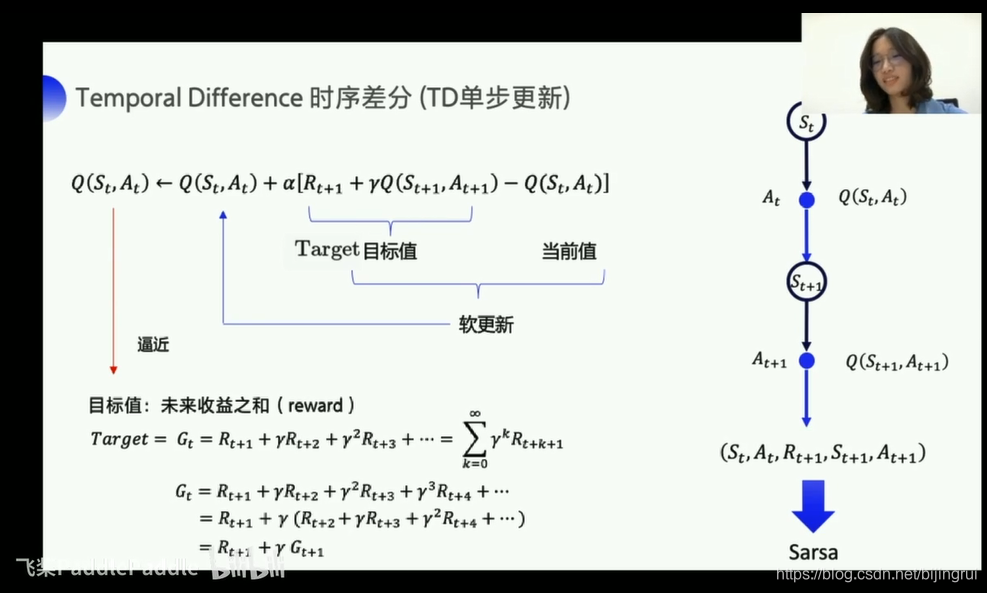
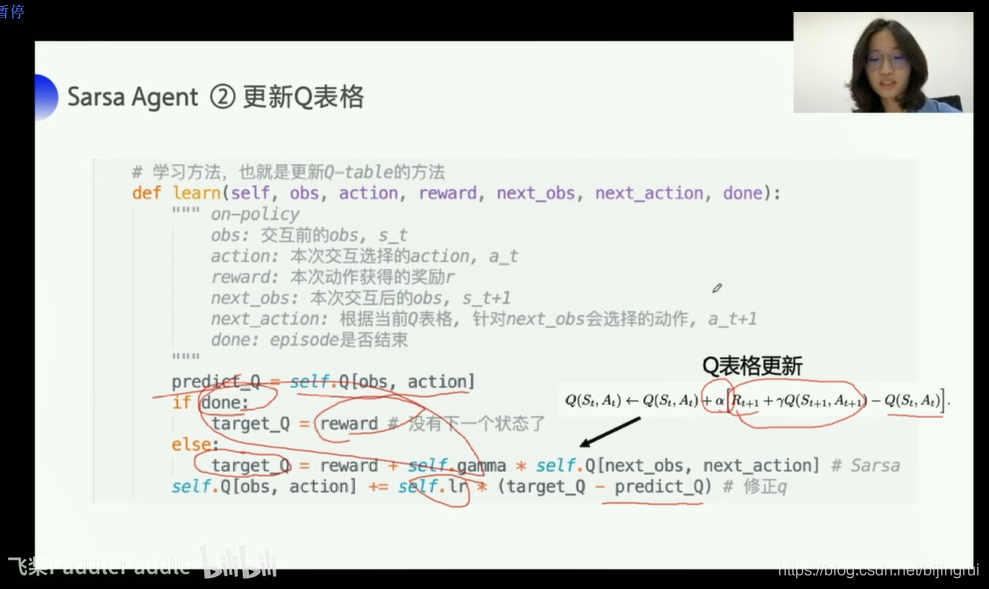
SARSA
名字来源
s a r s' a'
公式
他是on-policy的策略,s a r s' a'都是自己亲自操作得来的经验
sample一个动作探索/选择最优动作去predict

Qlearning
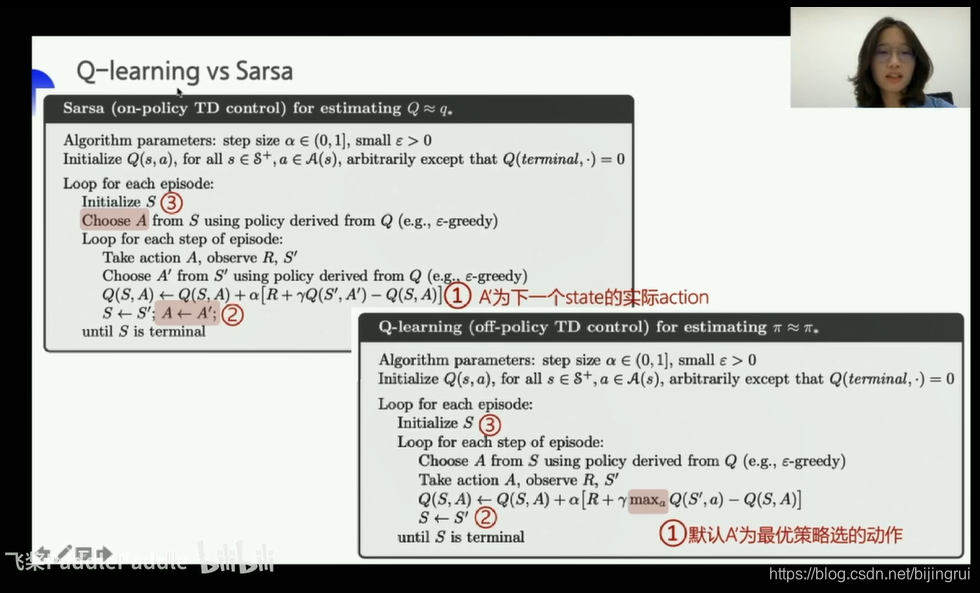
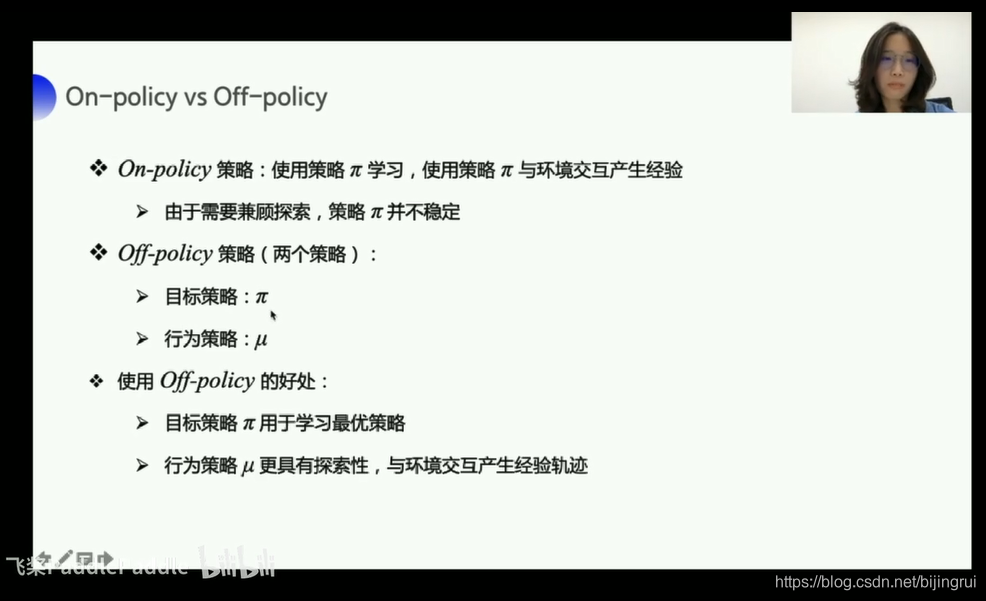
on-policy/off-policy
on policy
喂给的数据 是实实在在执行过的经验 是sarsa
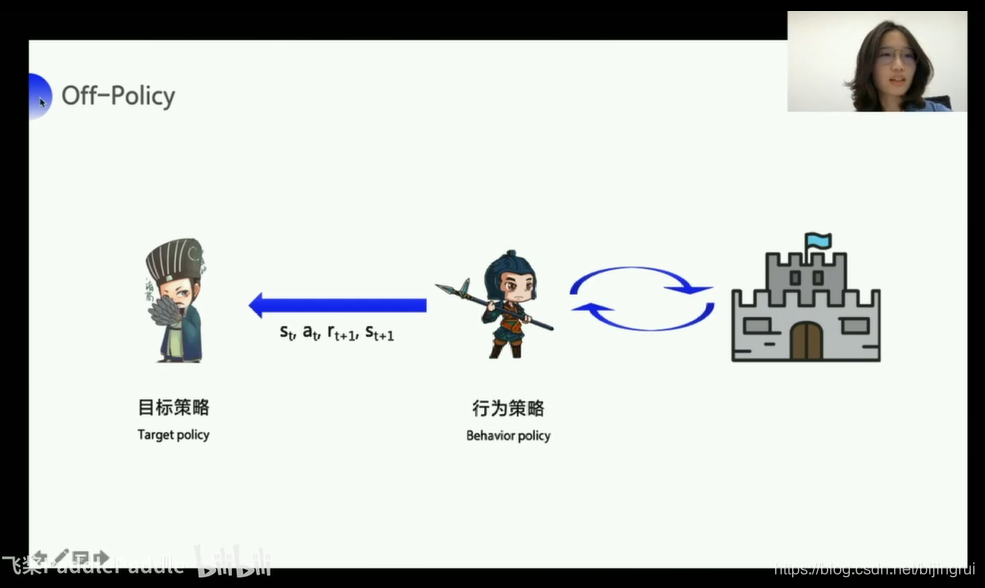
off policy
喂给的数据 并不是sarsa 而是 sars' 并不需要

在test_env,默认下一个action,就是predict的时候,选择value最大的action
在train_env ,下一个action是e-greedy探索的 action,比如90%是当前最优,10%是随机探索
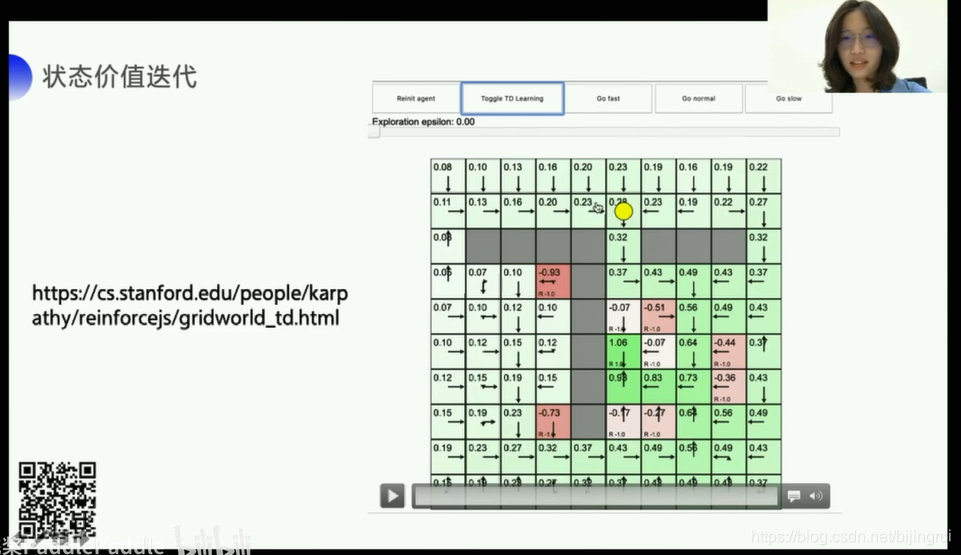
为什么sarsa保守?
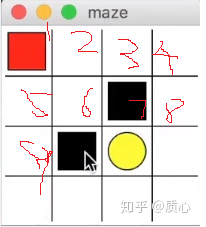
初始状态在左上角,目标奖励在黄色区域,黑色区域为惩罚。Q-learning的探索较为激进,Sarsa的探索较为保守。两者的action策略都是e-greedy,那么差异就出在的Qtable(Sarsatable)的更新策略上。
在靠近陷阱的区域9,一旦在某次action中尝试走入陷阱区域,两种策略均会在表中将陷阱处的state对应的数值降低,从而避免再次走入陷阱,比如Q(9,‘→’) = -100
但是Sarsa还会因此将前一步5的分值也降低,关注Q(5,‘↓’)的更新:
sarsa算法:s = 5,a = ‘↓’ ,r = -1, s' = 9,a' = ‘→’
对于q(5,‘↓’):q_target = r + self.gamma * self.q_table.loc[s', a'] q_predict = self.q_table.loc[s, a] q(s,a) = q(s,a) + a (q_target - q_predict)尤其是看q_target,代表我认为动作的价值
即Sarsa还通过调整Sarsa-table的方法,劝阻机器人进入s'状态9靠近陷阱。
Q-learning算法:
q_target = r + self.gamma * self.q_table.loc[s', :].max()对于进入s'状态9的行动,Q-learning不会因为曾经槽糕的下一步决策而降分,仅考虑下一步中最好的决策,也就会更加勇敢得靠近陷阱。

本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!