Nachi机器人外部启动
之前做的一个项目,实现PLC对机器人启动,主要是如下IO信号。
目录
- 概述
- 一.主要使用的IO输入信号
- 1.外部启动 (开始外部启动信号)
- 3.外部运转准备投入 (Motor 上电信号)
- 4.程序选通脉冲 (在程序号信号收到后,决定程序选择为信号)
- 5. 外部复位 (主要用于异常复位及步骤号复位为0)
- 6. 暂停 (外部暂停需求)
- 7. 干扰领域 (干扰领域保护,非必须信号)
- 二.主要使用的IO输出信号
- 1. 紧急停止中 (机器人被急停)
- 2.作业原位置 (机器人是否在Home点)
- 3.干扰领域
- 4. 错误 (机器人报错时)
概述
- 设备在开机时,需要告诉机器人需要从几号程序启动机器人,
(时序图中程序结束信号没有使用,ACK信号也没有使用,) - 时序图中在在外部启动信号给之前,先给程序复位信号,适当延时150ms,再给外部启动信号,
- 在设备运行中途暂停了机器人的启动方式, 在这时只是在原来的程序运行行继续运行,只需要执行 外部启动即可,


项目上跟PLC对接的信号都是经过继电器隔离,所以IO的时序信号都给的相对长些。
一.主要使用的IO输入信号
| 输入IO | 名称 |
|---|---|
| 1 | 外部启动 |
| 2 | 外部运转准备投入 |
| 3 | 程序选择位 |
| 4 | 程序选通脉冲 |
| 5 | 外部复位 |
| 6 | 暂停 |
| 7 | 干扰领域 (非必须信号) |
按照上述的启动时序图来启动机器人。
1.外部启动 (开始外部启动信号)

注意: 信号时间>= 200ms
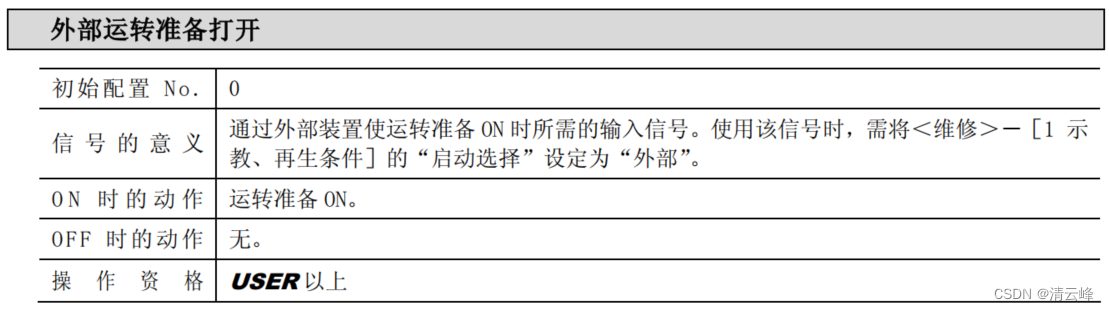
3.外部运转准备投入 (Motor 上电信号)
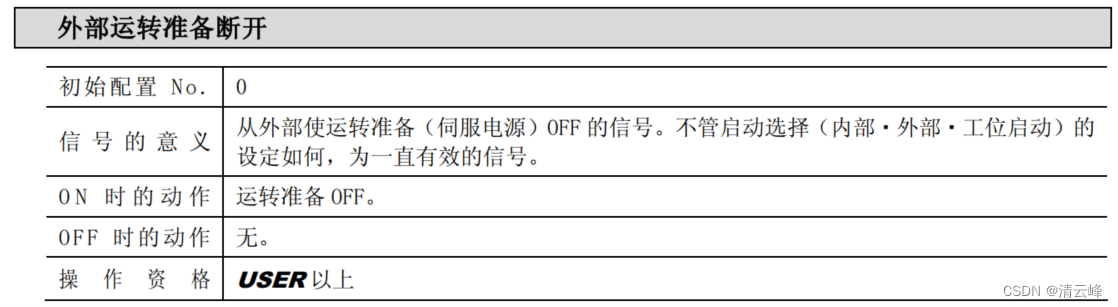
外部运转准备断开,这个没有用到,也介绍下:
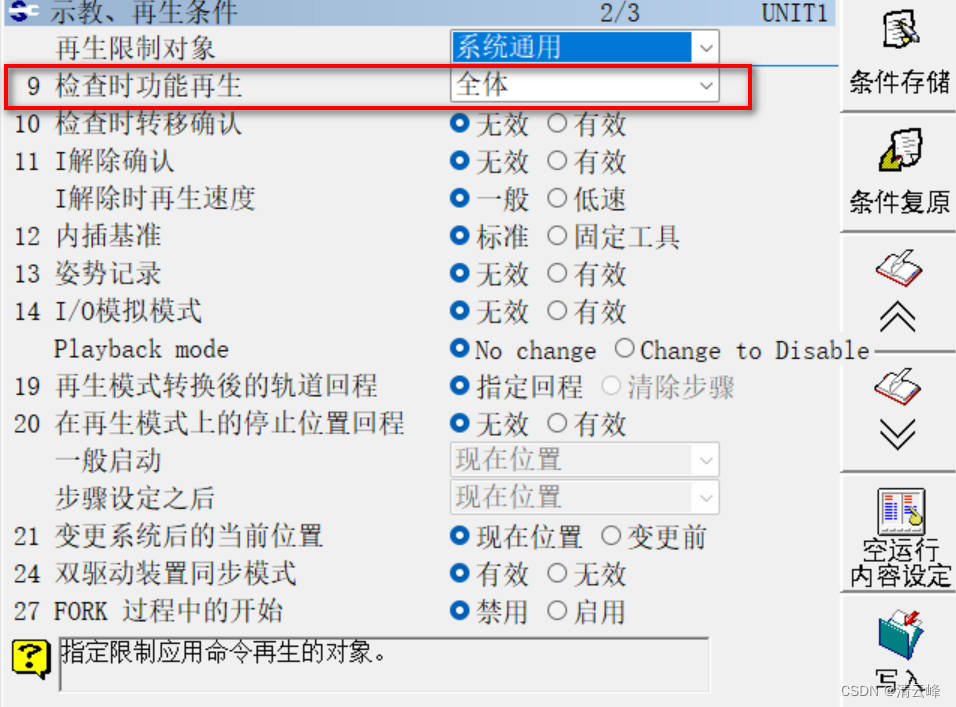
4.程序选通脉冲 (在程序号信号收到后,决定程序选择为信号)
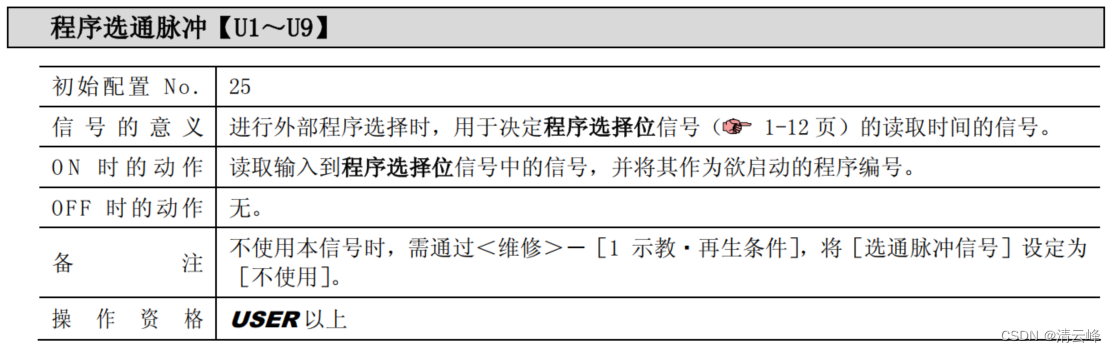
如下配置成 使用
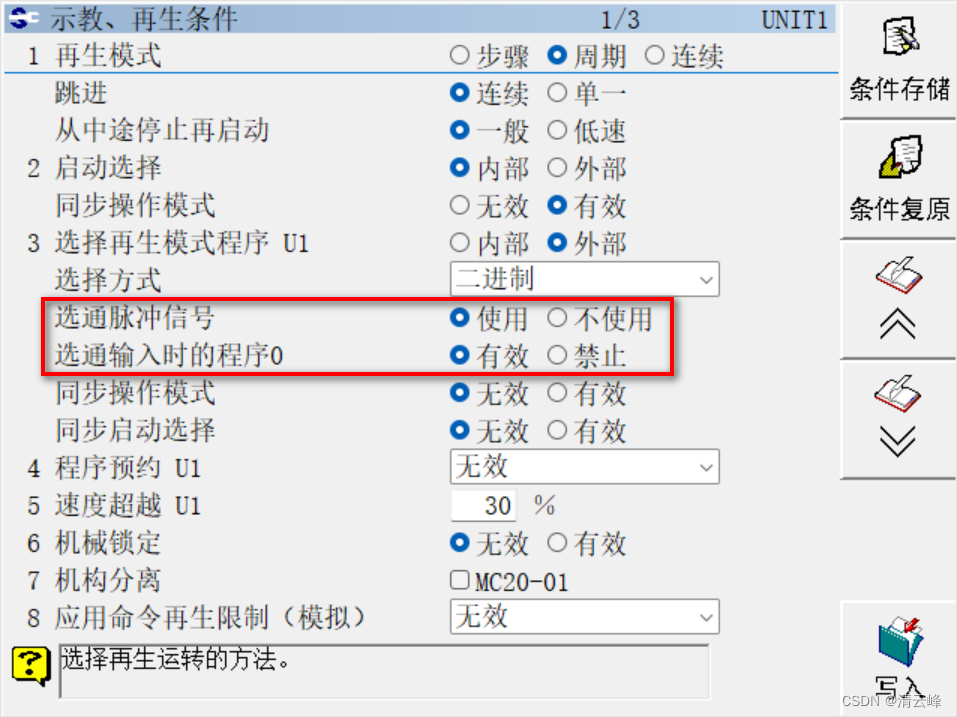
通常第9项检查时功能再生,设置为 “全体”。
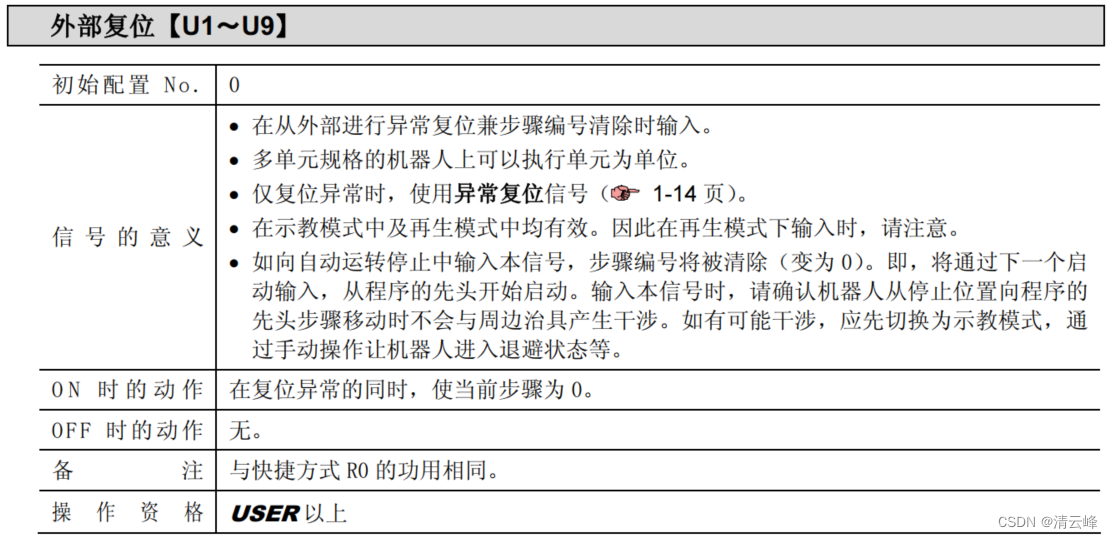
5. 外部复位 (主要用于异常复位及步骤号复位为0)
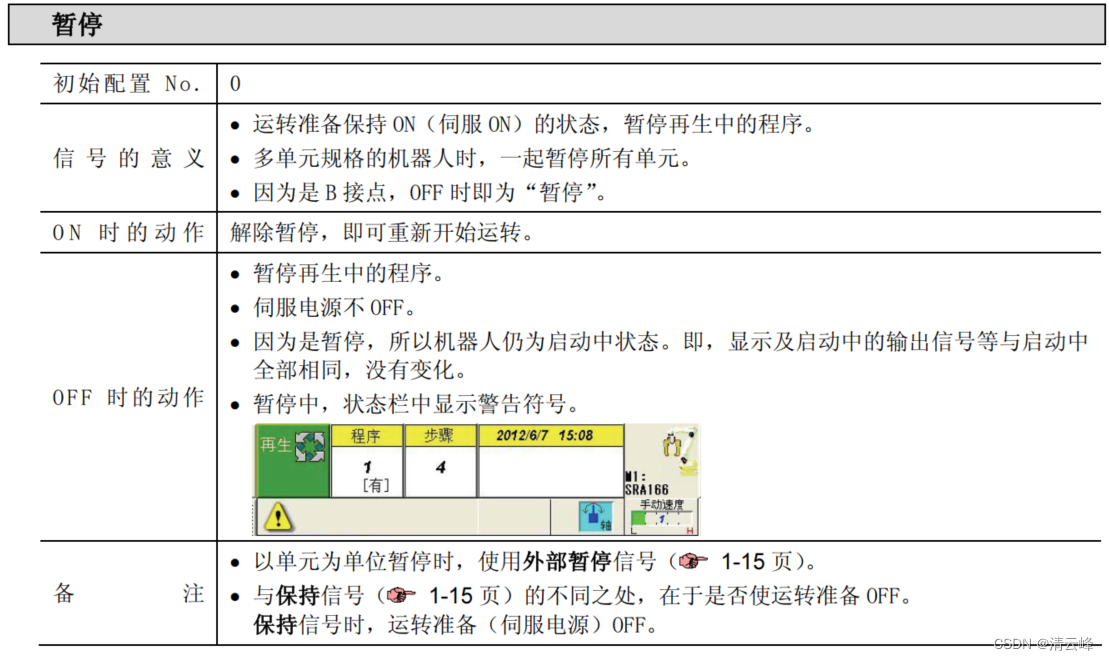
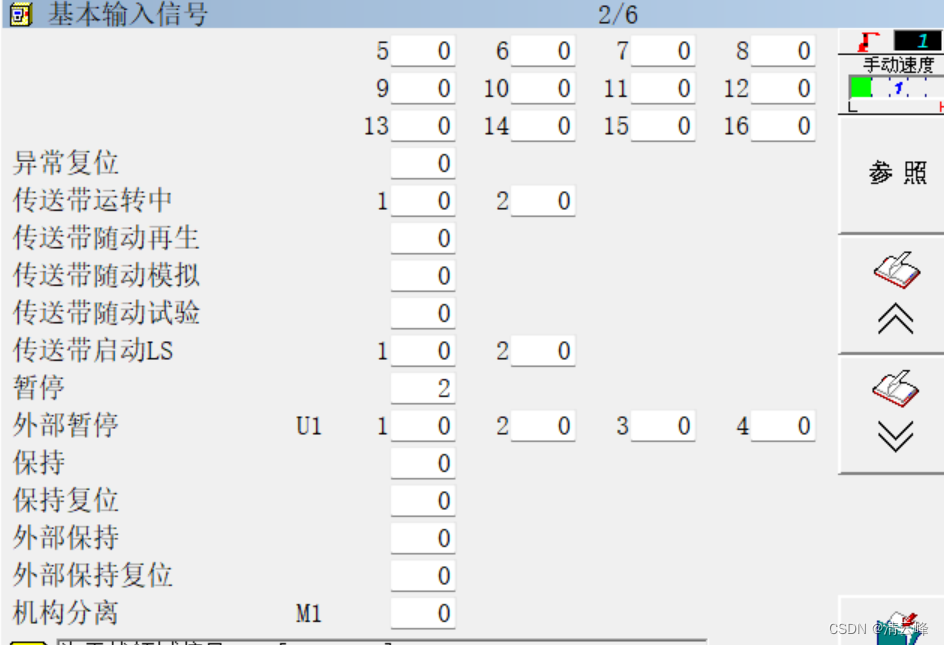
6. 暂停 (外部暂停需求)
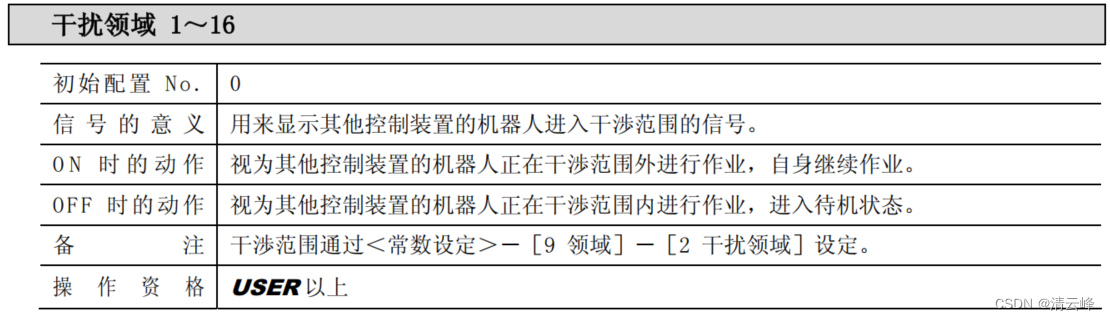
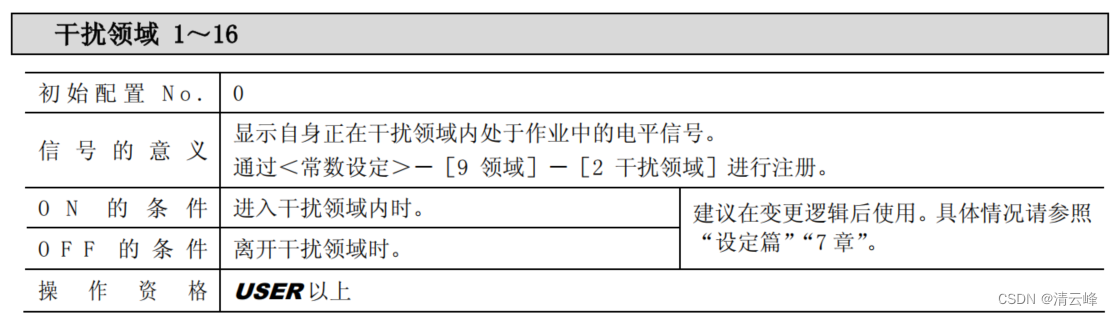
7. 干扰领域 (干扰领域保护,非必须信号)
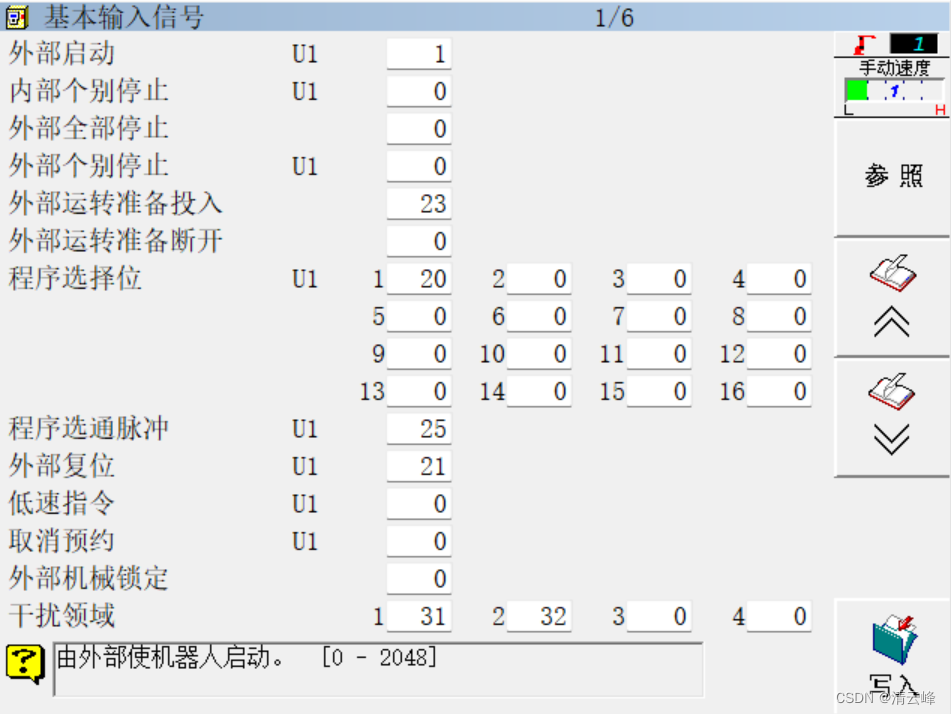
我的配置图:
按照此操作可以打开配置窗口,常数设定 --> 输出输入信号–> 输入信号分配 --> 基本输入信号
二.主要使用的IO输出信号
| 输出IO | 名称 |
|---|---|
| 1 | 紧急停止中 |
| 2 | 作业原位置 |
| 3 | 干扰领域 |
| 4 | 错误 |
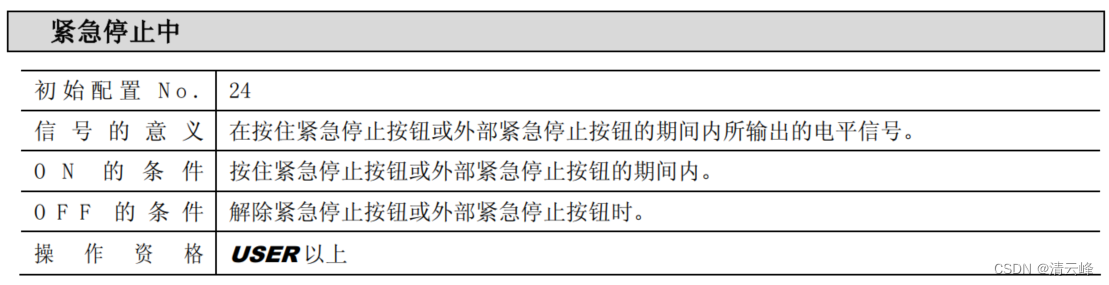
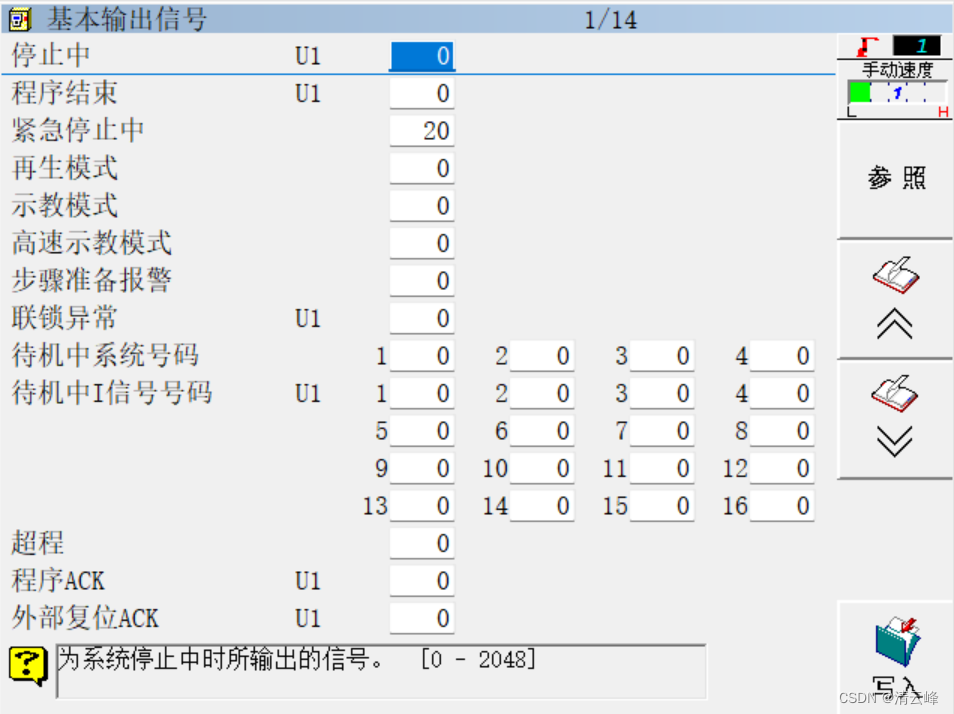
1. 紧急停止中 (机器人被急停)
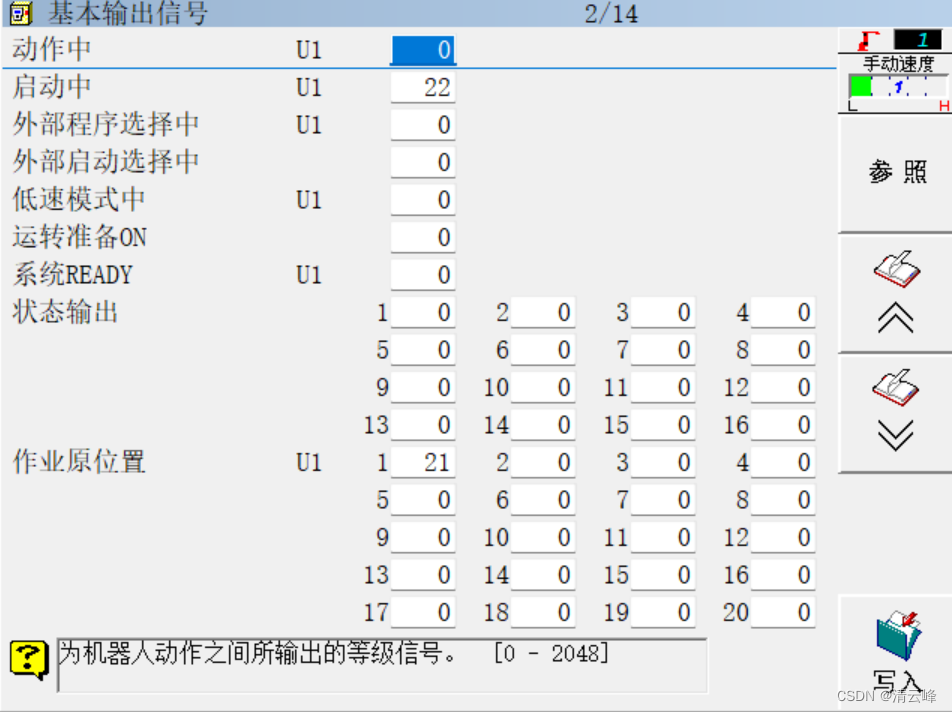
2.作业原位置 (机器人是否在Home点)
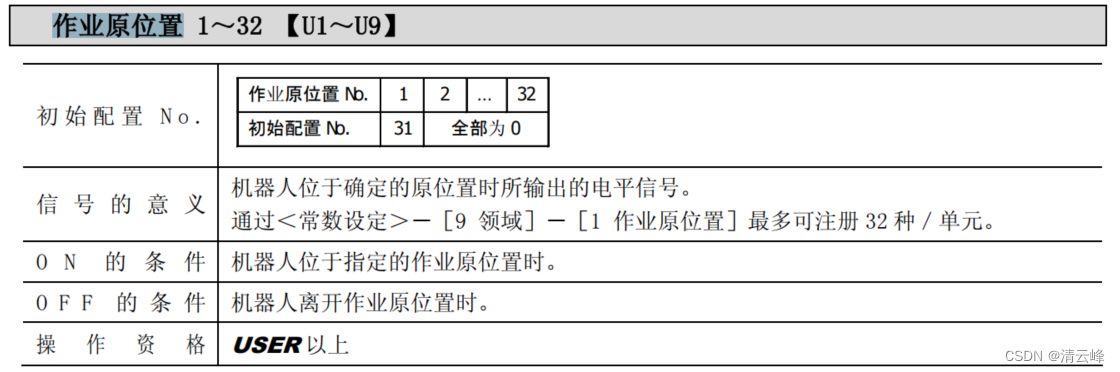
通过常数设定–9 领域–1 作业原位置注册信号

3.干扰领域
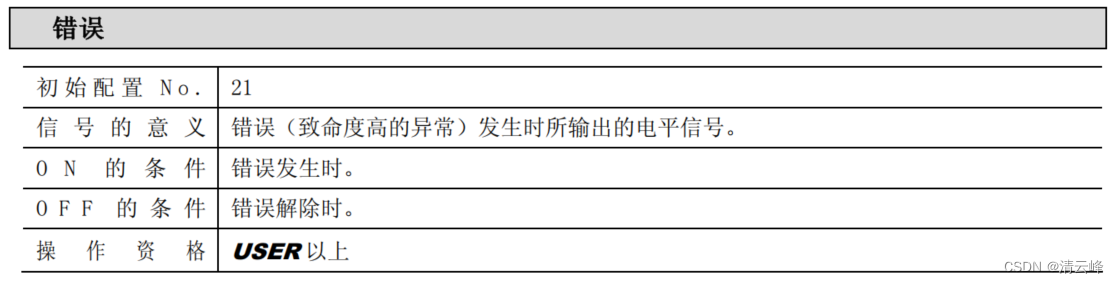
4. 错误 (机器人报错时)
我的配置图:
按照此操作可以打开配置窗口,常数设定 --> 输出输入信号–> 输出信号分配 --> 基本输出信号
其他不一一截图上图了,自己可以参考去配置。
今天先写到这里,如果后续有更新在继续,如果有不完善的地方,请诸位海涵。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!