px4 UDP实现WIFI数传
Mavros offboard
1 UDP实现wifi数传
机载电脑端设置
roscd mavros/launch
sudo gedit px4.launch
随后修改gcs地址
><!-- vim: set ft=xml noet : -->:57600" /><!-- 修改这一行! -->://:14550@" />>>>>>>>>>>>>>>>>
>
随后启动Mavros即可发布UDP数据。
使用命令ifconfig查看机载电脑的ip。
qgc端设置
打开qgroundcontrol,在通讯连接中点击添加
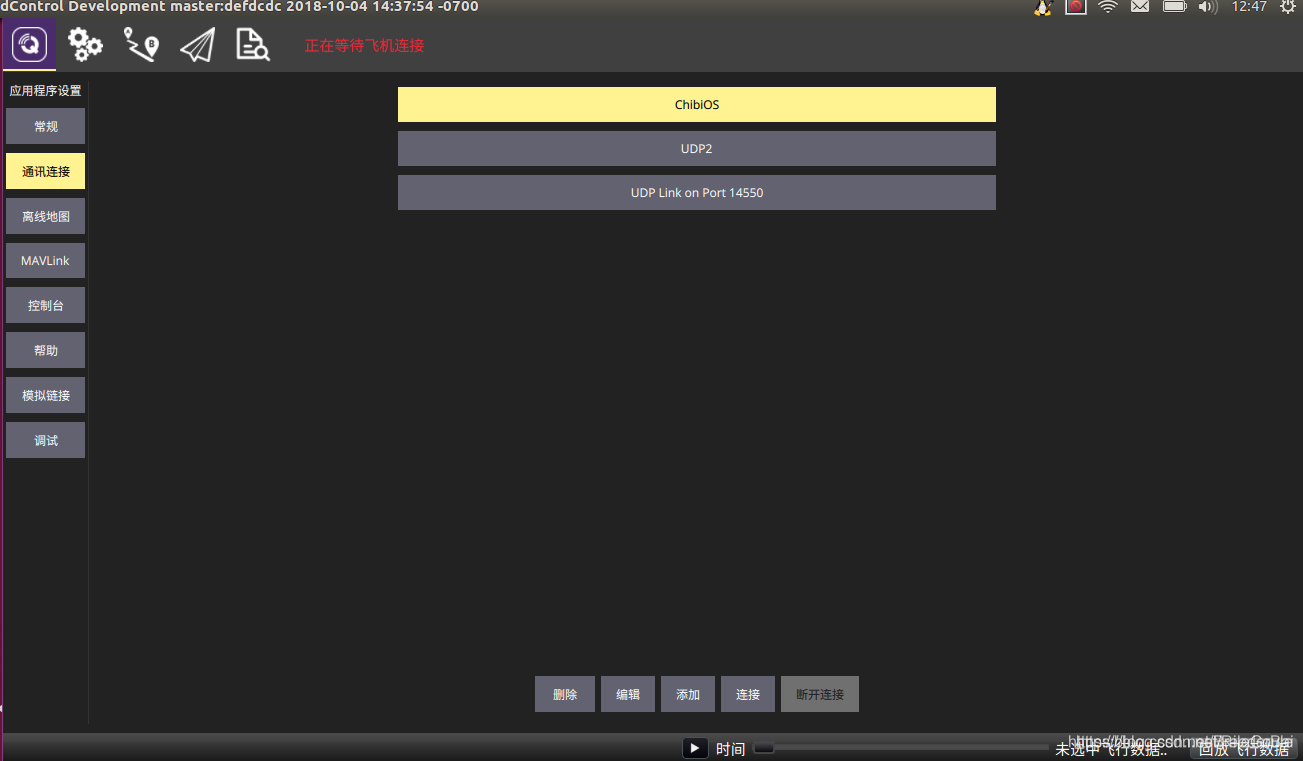
选择UDP,监听端口和之前设置的14550一致,目标主机填写板载电脑的ip:

2 查看飞行日志
将飞控连接到qgroundcontrol,下载飞行日志。随后打开网页https://logs.px4.io/上传日志即可可视化飞行数据,进行调参。
更多高级功能参考源网站https://github.com/PX4/flight_review。
官方说明:https://docs.px4.io/master/en/getting_started/flight_reporting.html
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!