基于单片机的电阻炉温度控制系统
资源下载地址:https://download.csdn.net/download/sheziqiong/87879975
资源下载地址:https://download.csdn.net/download/sheziqiong/87879975
基于单片机的电阻炉温度控制系统选题背景及意义可以从以下几个方面来考虑:
工业生产的需求:电阻炉是一种常用的加热设备,广泛应用于各种工业生产中。而温度控制是电阻炉正常运行的关键,因此基于单片机的电阻炉温度控制系统可以提高生产效率和产品质量。
技术发展的趋势:随着科技的不断发展,单片机技术已经得到广泛应用。而基于单片机的电阻炉温度控制系统可以充分发挥单片机的优势,提高温度控制的精度和稳定性。
节能减排的要求:随着环保意识的不断提高,节能减排已成为各行各业的重要任务。而基于单片机的电阻炉温度控制系统可以通过精确控制温度,减少能源的浪费,降低对环境的影响。
综上所述,基于单片机的电阻炉温度控制系统具有重要的背景和意义,可以提高生产效率和产品质量,充分发挥单片机技术的优势,同时也符合节能减排的要求。
温度设定部分
设定部分主要是键盘输入,此部分主要由三个按键组成,PLAS为加,SUBS为减,START为开始。当系统启动时,默认设定温度为30℃,当按下PLAS时设置水温增加,按下SUBS时设置水温减小,当按下START时为开始加热。
此部分按键为常开按钮,当不触发时为断开状态,按键按下之后与地连接,故为低电平,单片机读取按键数据为低电平时有效。
仿真说明
由于单片机端口的驱动能力有限,所以令其低电平触发光电耦合器,故当P1.5口输出低电平时电热丝加热。
当设定温度与实际温度之差大于10℃时属于粗调,即令电热丝持续加热,无PWM控制;当设定温度与实际温度之差小于10℃时属于微调,即电热丝加热时受PWM控制。
仿真结果
对各温度仿真结果如下:
(1)实际温度19℃,设定温度30℃
当差值大于10℃时,输出为低电平,电热丝持续加热,如图5.1所示:
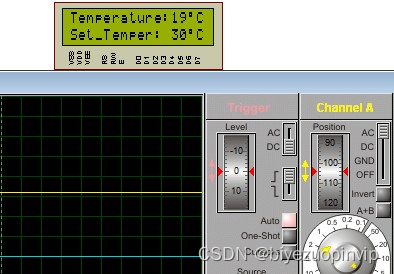
图1.1仿真图一
(2)实际温度21℃,设定温度30℃
当差值小于10℃,控制算法开始起作用,由低电平部分控制加热,如图5.2所示:
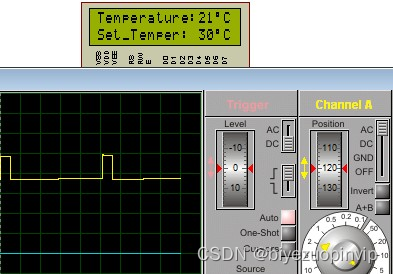
图1.2仿真图二
(3)实际温度24℃,设定温度30℃
当差值逐渐缩小,低电平时间减少,电热丝功率降低,如图5.3所示:
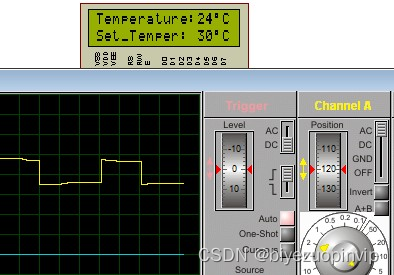
图1.3仿真图三
(4)实际温度28℃,设定温度30℃
当差值逐渐缩小,低电平时间减少,电热丝功率降低,如图5.4所示:
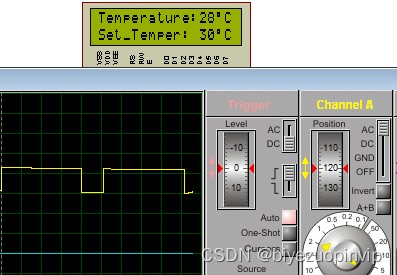
图1.4仿真图四
(5)实际温度32℃,设定温度30℃
当设定温度小于实际温度时,PWM输出高电平,电热丝不工作,如图5.5所示:

图1.5仿真图五
1.2结论
(1)当设定温度与实际温度之差小于10℃时,P1.5输出PWM方波控制电热丝加热功率,以达到精确调温的目的。
(2)当差值大于10℃时,电热丝持续加热,使其尽快进入到PWM调节阶段
(3)当设定温度小于实际温度,说明温度已超调,故电热丝不工作,使其降温。
//包含的头文件
#include
#include
#include
#include
资源下载地址:https://download.csdn.net/download/sheziqiong/87879975
资源下载地址:https://download.csdn.net/download/sheziqiong/87879975
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!